HGDiffuser: Efficient Task-Oriented Grasp Generation via Human-Guided Grasp Diffusion Models
作者: Dehao Huang, Wenlong Dong, Chao Tang, Hong Zhang
分类: cs.RO
发布日期: 2025-03-01
备注: 8 pages, 6 figures
💡 一句话要点
HGDiffuser:通过人类引导的抓取扩散模型实现高效的面向任务的抓取生成
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 面向任务抓取 扩散模型 人类引导 机器人操作 抓取生成
📋 核心要点
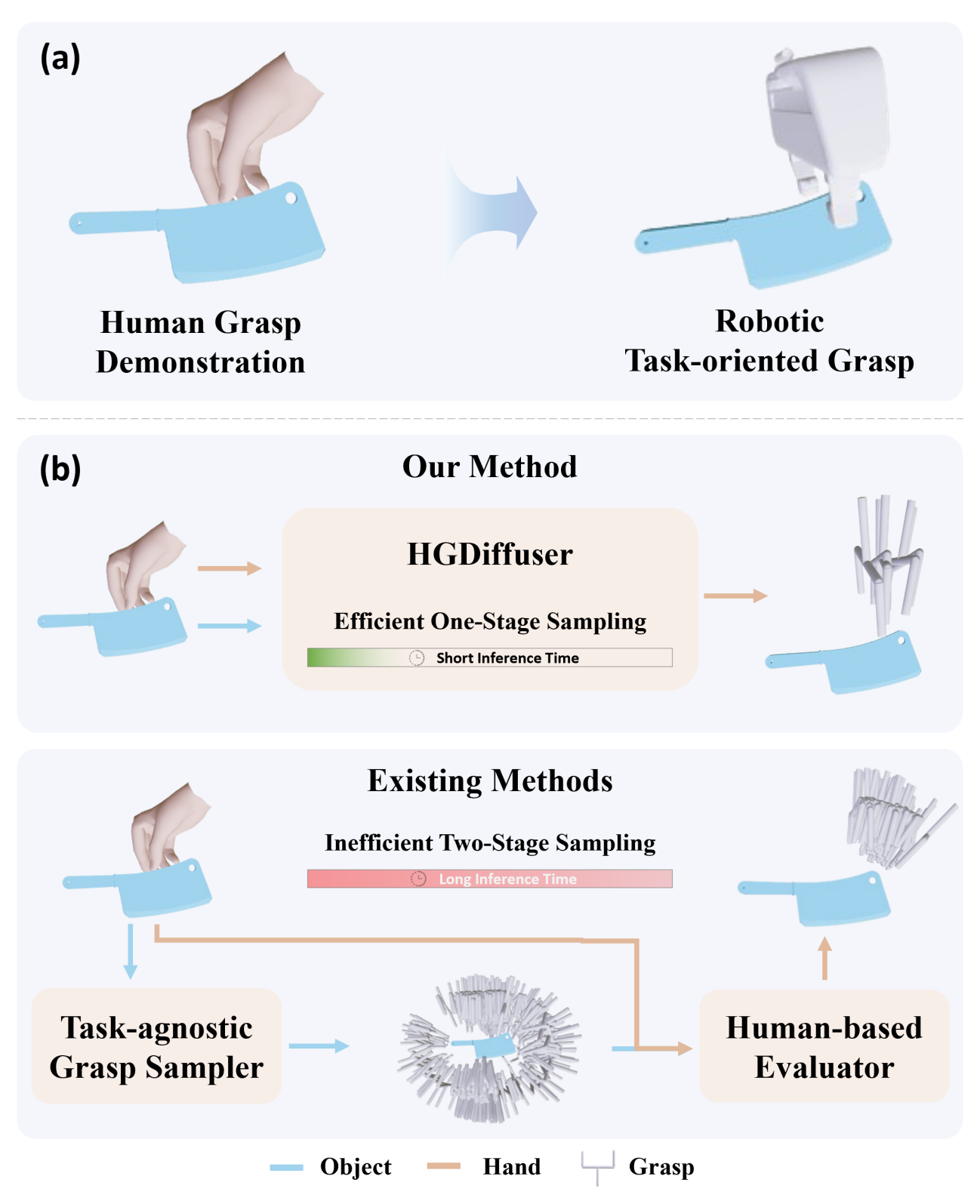
- 现有面向任务的抓取方法依赖两阶段采样,效率低且易失败,难以保证抓取稳定性和采样效率。
- HGDiffuser提出一种基于扩散的框架,将人类演示约束集成到引导采样中,单阶段直接生成6自由度抓取。
- 实验表明,HGDiffuser显著提高了面向任务的抓取生成效率,并能有效迁移人类抓取策略。
📝 摘要(中文)
面向任务的抓取(TOG)对于机器人执行操作任务至关重要,它要求抓取既稳定又符合特定任务的约束。人类自然地以面向任务的方式抓取物体,以方便后续的操作任务。通过利用人类抓取演示,目前的方法可以为不同的物体和任务生成高质量的机器人平行爪面向任务的抓取。然而,它们在保持抓取稳定性和采样效率方面仍然面临挑战。这些方法通常依赖于一个两阶段过程:首先在6自由度空间中执行详尽的与任务无关的抓取采样,然后应用演示诱导的约束(例如,接触区域和手腕方向)来过滤候选者。由于巨大的采样空间,这导致效率低下和潜在的失败。为了解决这个问题,我们提出了人类引导的抓取扩散器(HGDiffuser),这是一个基于扩散的框架,它将这些约束集成到引导采样过程中。通过这种方法,HGDiffuser直接在单阶段生成6自由度面向任务的抓取,消除了详尽的与任务无关的采样。此外,通过结合扩散Transformer(DiT)块作为特征骨干,HGDiffuser提高了抓取生成质量,优于基于MLP的方法。实验结果表明,我们的方法显著提高了面向任务的抓取生成的效率,从而能够更有效地将人类抓取策略转移到机器人系统。
🔬 方法详解
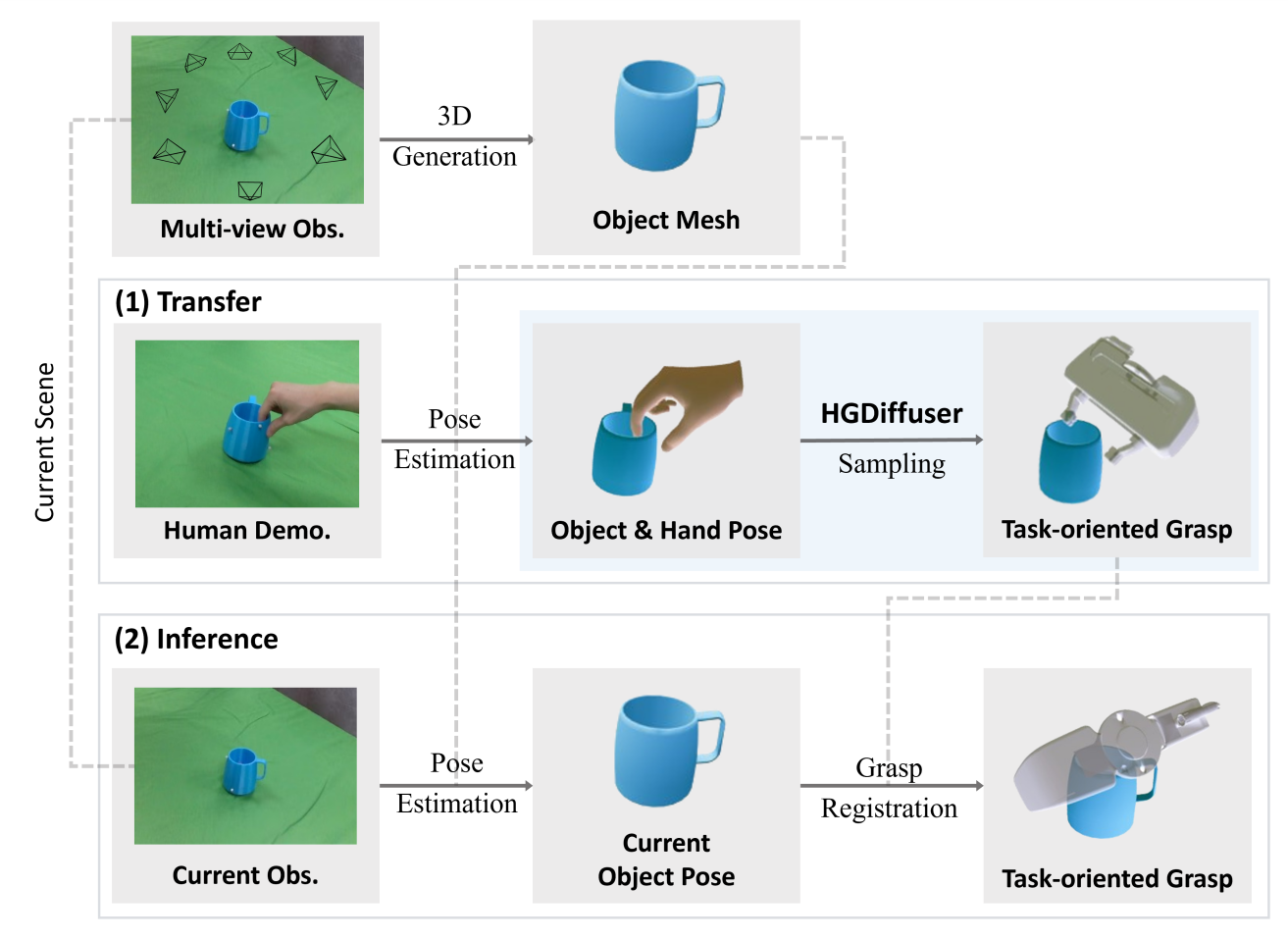
问题定义:论文旨在解决机器人面向任务的抓取生成问题。现有方法通常采用两阶段策略,首先进行大量的任务无关的抓取采样,然后根据人类演示数据进行过滤。这种方法效率低下,因为需要在庞大的6自由度空间中搜索,并且过滤过程可能导致最优抓取的丢失。因此,如何高效、稳定地生成符合任务约束的抓取姿态是本研究要解决的核心问题。
核心思路:HGDiffuser的核心思路是将人类的抓取演示知识融入到抓取生成的过程中,通过扩散模型引导采样过程,从而避免了传统方法中大量的无效采样。该方法利用人类的抓取数据作为先验知识,指导模型生成更符合任务需求的抓取姿态,从而提高采样效率和抓取质量。
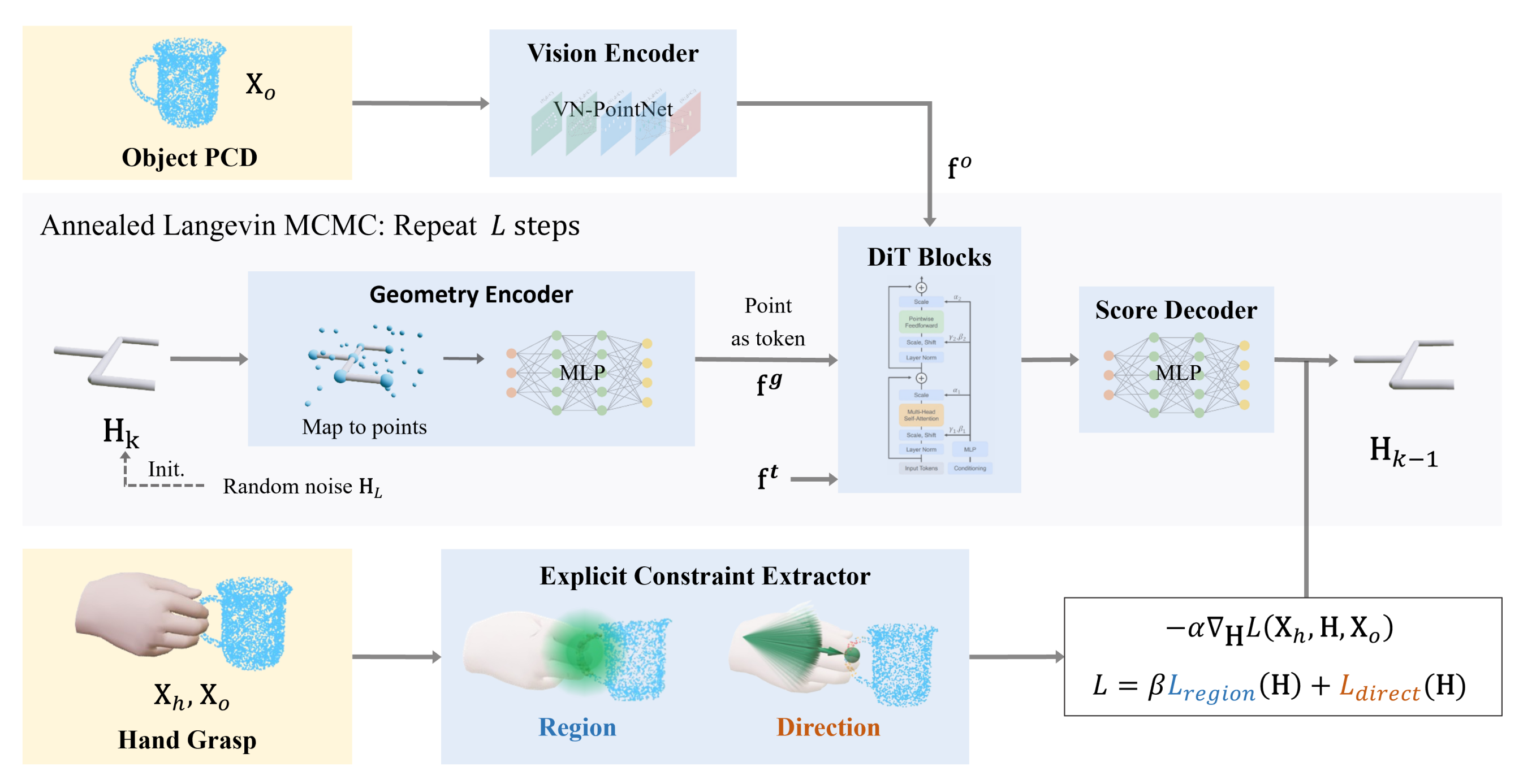
技术框架:HGDiffuser采用基于扩散模型的框架,主要包括以下几个关键模块:1)扩散过程:将抓取姿态逐步加入噪声,直至完全随机;2)逆扩散过程:从随机噪声逐步恢复出抓取姿态,该过程受到人类抓取演示数据的引导;3)Diffusion Transformer (DiT) 块:作为特征提取的骨干网络,用于学习抓取姿态与任务之间的关系。整体流程是从随机噪声开始,通过DiT块提取特征,并根据人类演示数据逐步去噪,最终生成符合任务约束的抓取姿态。
关键创新:HGDiffuser的关键创新在于将扩散模型与人类抓取演示数据相结合,实现了一种高效的、单阶段的面向任务的抓取生成方法。与传统的两阶段方法相比,HGDiffuser避免了大量的无效采样,显著提高了采样效率。此外,采用Diffusion Transformer (DiT) 块作为特征提取器,提升了抓取生成质量。
关键设计:HGDiffuser的关键设计包括:1)使用人类抓取演示数据作为引导信号,通过条件扩散模型控制抓取生成过程;2)采用Diffusion Transformer (DiT) 块作为特征提取器,学习抓取姿态与任务之间的复杂关系;3)损失函数的设计需要平衡抓取的稳定性和任务约束,例如,可以采用接触点损失、方向损失等。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了HGDiffuser的有效性。实验结果表明,HGDiffuser在抓取生成效率方面显著优于传统方法,能够在更短的时间内生成更高质量的抓取姿态。此外,HGDiffuser在抓取成功率方面也表现出明显的优势,能够更好地适应不同的物体和任务。
🎯 应用场景
HGDiffuser在机器人操作领域具有广泛的应用前景,例如,可以应用于工业自动化、家庭服务机器人、医疗机器人等场景。通过学习人类的抓取策略,机器人可以更高效、更安全地完成各种操作任务,例如,装配、搬运、清洁等。该研究有助于提高机器人的智能化水平,使其更好地服务于人类。
📄 摘要(原文)
Task-oriented grasping (TOG) is essential for robots to perform manipulation tasks, requiring grasps that are both stable and compliant with task-specific constraints. Humans naturally grasp objects in a task-oriented manner to facilitate subsequent manipulation tasks. By leveraging human grasp demonstrations, current methods can generate high-quality robotic parallel-jaw task-oriented grasps for diverse objects and tasks. However, they still encounter challenges in maintaining grasp stability and sampling efficiency. These methods typically rely on a two-stage process: first performing exhaustive task-agnostic grasp sampling in the 6-DoF space, then applying demonstration-induced constraints (e.g., contact regions and wrist orientations) to filter candidates. This leads to inefficiency and potential failure due to the vast sampling space. To address this, we propose the Human-guided Grasp Diffuser (HGDiffuser), a diffusion-based framework that integrates these constraints into a guided sampling process. Through this approach, HGDiffuser directly generates 6-DoF task-oriented grasps in a single stage, eliminating exhaustive task-agnostic sampling. Furthermore, by incorporating Diffusion Transformer (DiT) blocks as the feature backbone, HGDiffuser improves grasp generation quality compared to MLP-based methods. Experimental results demonstrate that our approach significantly improves the efficiency of task-oriented grasp generation, enabling more effective transfer of human grasping strategies to robotic systems. To access the source code and supplementary videos, visit https://sites.google.com/view/hgdiffuser.