Physics-Driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization
作者: Lujie Yang, H. J. Terry Suh, Tong Zhao, Bernhard Paus Graesdal, Tarik Kelestemur, Jiuguang Wang, Tao Pang, Russ Tedrake
分类: cs.RO, cs.AI, cs.LG, eess.SY
发布日期: 2025-02-27 (更新: 2026-01-07)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于物理的数据生成流程,用于接触丰富的机器人操作任务
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting)
关键词: 机器人操作 数据生成 物理仿真 轨迹优化 深度学习 扩散策略 接触丰富操作
📋 核心要点
- 接触丰富的机器人操作任务数据获取成本高昂,现有方法难以兼顾数据质量和多样性。
- 该论文提出一种基于物理的数据生成流程,结合物理仿真、人类演示和轨迹优化,高效生成高质量数据集。
- 实验表明,使用生成的数据集训练的策略在真实机器人上实现了高成功率,验证了流程的有效性。
📝 摘要(中文)
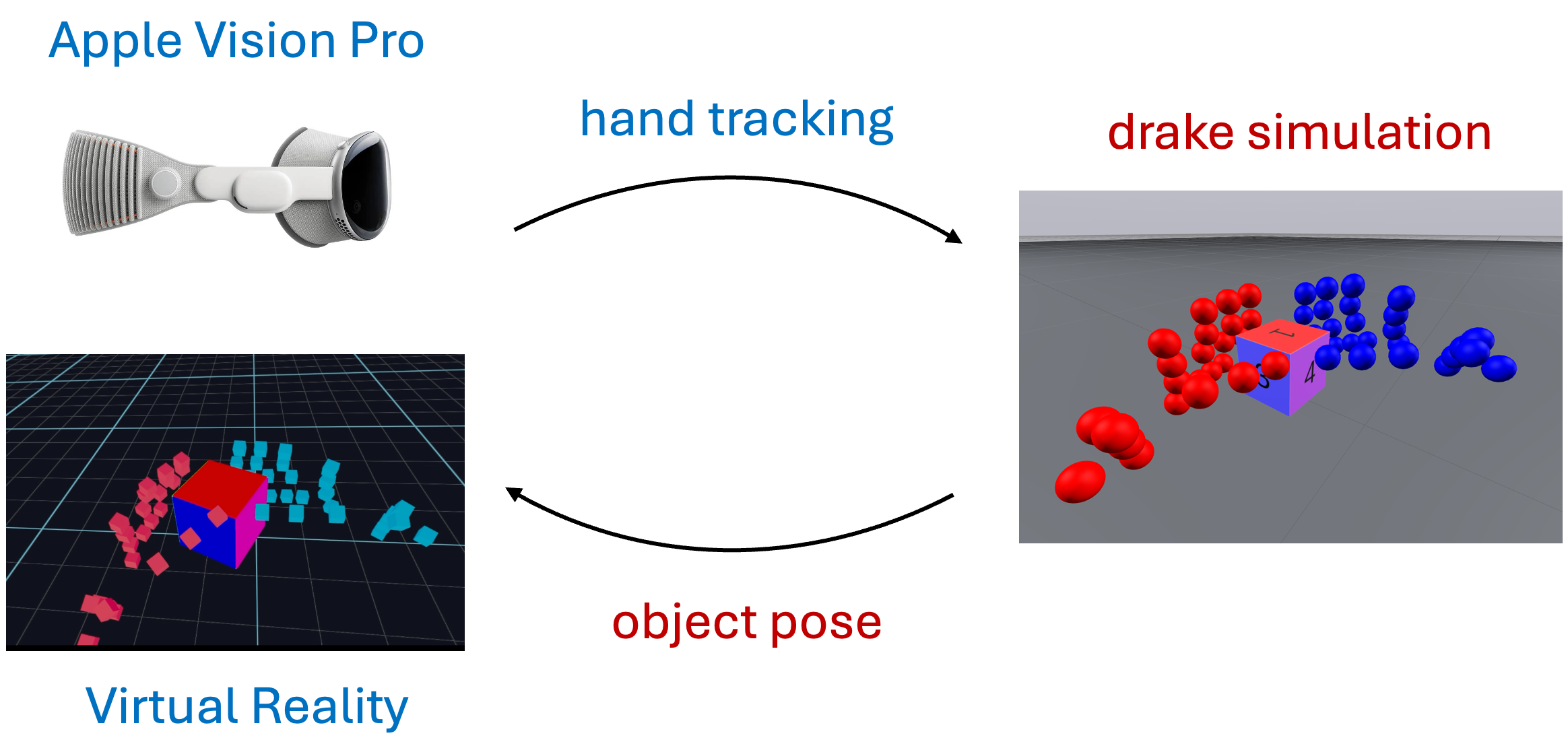
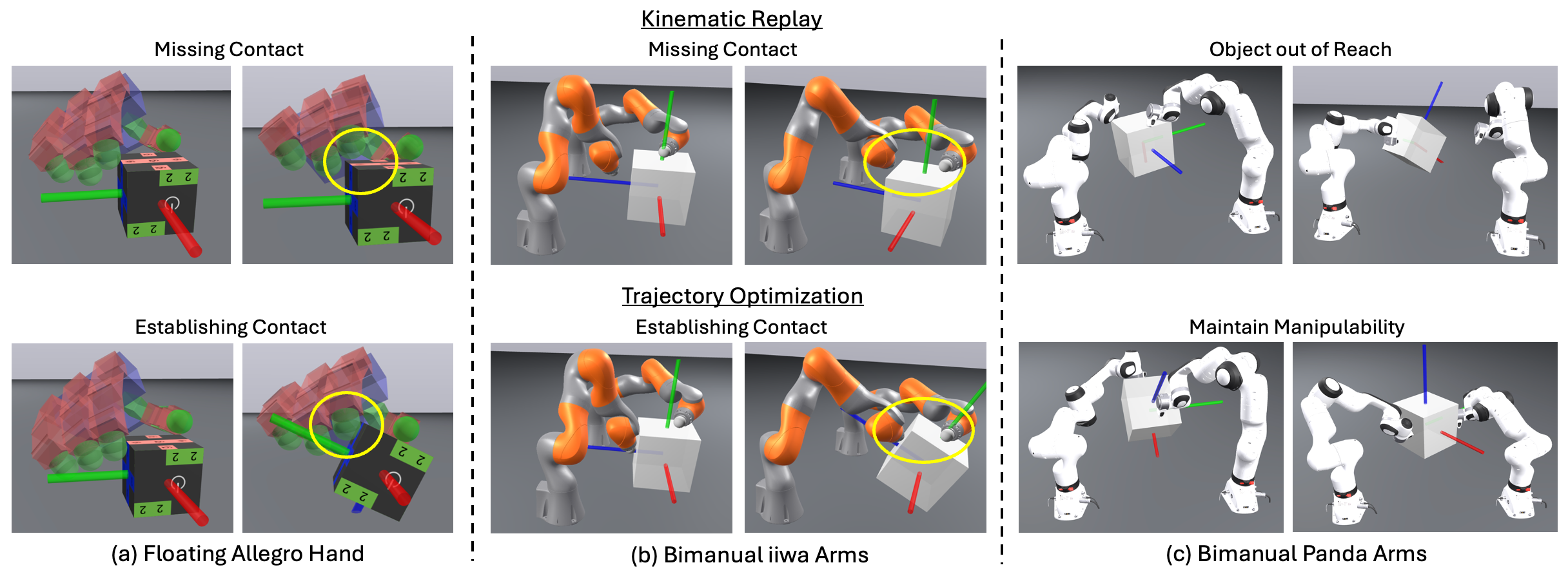
本文提出了一种低成本的数据生成流程,该流程集成了基于物理的仿真、人类演示和基于模型的规划,以高效地生成大规模、高质量的数据集,用于接触丰富的机器人操作任务。从在虚拟现实仿真环境中收集的少量、具有灵活机构的人类演示开始,该流程使用基于优化的运动学重定向和轨迹优化来改进这些演示,以使其适应各种机器人机构和物理参数。此过程产生了一个多样化的、物理上一致的数据集,该数据集支持跨机构的数据传输,并提供了重用在不同硬件配置或物理参数下收集的遗留数据集的潜力。我们通过从生成的用于多个机器人机构(包括浮动Allegro手和双臂机器人)的具有挑战性的接触丰富的操作任务的数据集中训练扩散策略来验证该流程的有效性。训练后的策略以零样本方式部署在双臂iiwa硬件上,以最少的人工输入实现了高成功率。
🔬 方法详解
问题定义:接触丰富的机器人操作任务,例如装配、抓取等,对数据驱动的策略学习提出了挑战。现有方法要么依赖于昂贵的真实世界数据收集,要么依赖于仿真数据,但仿真数据往往难以模拟真实的物理交互,导致策略泛化能力差。此外,不同机器人机构之间的数据难以迁移,限制了数据的复用性。
核心思路:该论文的核心思路是利用物理仿真生成大量数据,并通过优化方法提高数据的真实性和多样性。具体来说,首先通过虚拟现实环境收集少量人类演示,然后利用运动学重定向和轨迹优化方法,将这些演示适配到不同的机器人机构和物理参数下,从而生成一个多样化的、物理上一致的数据集。
技术框架:该数据生成流程主要包含以下几个阶段: 1. 人类演示收集:在虚拟现实环境中收集少量人类演示,这些演示具有机构灵活性的特点。 2. 运动学重定向:将人类演示的运动学信息映射到不同的机器人机构上,实现跨机构的数据迁移。 3. 轨迹优化:利用轨迹优化方法,对重定向后的轨迹进行优化,使其满足物理约束,并提高轨迹的平滑性和可行性。 4. 数据集生成:将优化后的轨迹作为训练数据,生成大规模、高质量的数据集。
关键创新:该论文的关键创新在于将物理仿真、人类演示和轨迹优化相结合,提出了一种低成本、高效的数据生成流程。与传统的纯仿真方法相比,该方法利用人类演示的先验知识,提高了数据的真实性。与传统的纯数据驱动方法相比,该方法利用物理仿真和轨迹优化,提高了数据的多样性和物理一致性。
关键设计: 1. 运动学重定向:采用基于优化的运动学重定向方法,最小化人类演示和机器人机构之间的运动学差异。 2. 轨迹优化:采用基于模型的轨迹优化方法,利用物理引擎模拟机器人的运动,并优化轨迹以满足物理约束。 3. 损失函数:在轨迹优化过程中,采用多种损失函数,包括碰撞避免损失、关节力矩限制损失、目标达成损失等,以保证轨迹的安全性和可行性。 4. 参数设置:针对不同的机器人机构和任务,需要调整物理引擎的参数,例如摩擦系数、质量、惯性等,以提高仿真的真实性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,使用该流程生成的数据集训练的扩散策略在多个机器人机构上取得了良好的性能。例如,在双臂iiwa机器人上,该策略以零样本方式部署,实现了高成功率,证明了该流程的有效性和泛化能力。此外,该方法还能够重用在不同硬件配置或物理参数下收集的遗留数据集,进一步提高了数据的利用率。
🎯 应用场景
该研究成果可广泛应用于机器人操作领域,尤其是在接触丰富的操作任务中,例如装配、抓取、操作工具等。通过生成高质量的训练数据,可以降低机器人学习的成本,提高机器人的智能化水平。此外,该方法还可以用于生成不同机器人机构的数据,实现跨机构的数据迁移和知识共享,加速机器人技术的普及。
📄 摘要(原文)
We present a low-cost data generation pipeline that integrates physics-based simulation, human demonstrations, and model-based planning to efficiently generate large-scale, high-quality datasets for contact-rich robotic manipulation tasks. Starting with a small number of embodiment-flexible human demonstrations collected in a virtual reality simulation environment, the pipeline refines these demonstrations using optimization-based kinematic retargeting and trajectory optimization to adapt them across various robot embodiments and physical parameters. This process yields a diverse, physically consistent dataset that enables cross-embodiment data transfer, and offers the potential to reuse legacy datasets collected under different hardware configurations or physical parameters. We validate the pipeline's effectiveness by training diffusion policies from the generated datasets for challenging contact-rich manipulation tasks across multiple robot embodiments, including a floating Allegro hand and bimanual robot arms. The trained policies are deployed zero-shot on hardware for bimanual iiwa arms, achieving high success rates with minimal human input. Project website: https://lujieyang.github.io/physicsgen/.