The Geometry of Optimal Gait Families for Steering Kinematic Locomoting Systems
作者: Jinwoo Choi, Siming Deng, Nathan Justus, Noah J. Cowan, Ross L. Hatton
分类: cs.RO, math.OC
发布日期: 2025-02-24
备注: 17 pages, submitted to IEEE Transactions on Robotics
💡 一句话要点
针对运动学驱动系统的最优步态族几何结构研究,提升可控性和机动性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 最优控制 步态生成 蛇形机器人 运动学驱动系统
📋 核心要点
- 现有运动规划方法难以处理受关节限制约束的复杂运动系统,尤其是在将高层任务转化为底层轨迹时。
- 论文提出一种生成连续最优步态族的方法,通过步长或转向率参数化步态,从而增强系统的可控性和机动性。
- 通过全局和局部搜索策略构建最优步态族,并在三连杆游泳者模型上验证了该框架的有效性。
📝 摘要(中文)
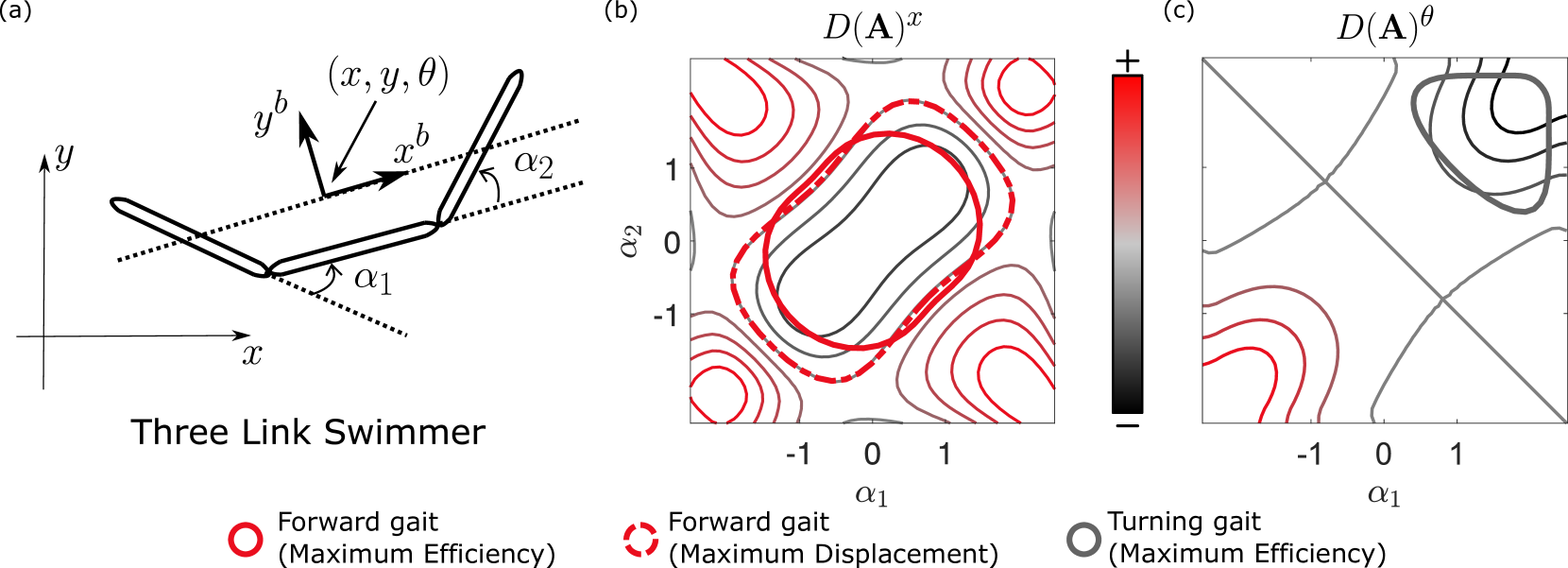
运动系统的运动规划通常需要将高层刚体任务转化为底层关节轨迹。对于具有固定、无界驱动输入的类汽车机器人来说,这个过程很简单,但对于像蛇形机器人这样的系统来说,这种映射取决于当前的配置,并受到关节限制的约束,因此更具挑战性。本文侧重于生成连续的最优步态族(由步长或转向率参数化的步态集合),以增强可控性和机动性。我们揭示了这些最优步态族的潜在几何结构,并提出了使用全局和局部搜索策略构建它们的方法,其中局部方法和全局方法相互补偿。全局搜索方法对非光滑行为具有鲁棒性,但会产生降阶解,而局部搜索提供更高的精度,但在非光滑区域附近可能不稳定。为了演示我们的框架,我们为粘性和理想流体三连杆游泳者生成了最优步态族。这项工作为将底层关节控制器与复杂运动系统中的高层运动规划器集成奠定了基础。
🔬 方法详解
问题定义:论文旨在解决运动学驱动系统中,如何生成最优步态以实现高效运动规划的问题。现有方法在处理具有复杂约束(如关节限制)的系统时,难以找到最优的关节轨迹,尤其是在需要连续变化的步态以实现平滑转向时。现有的运动规划方法通常难以直接应用于蛇形机器人等系统,因为其运动学映射高度依赖于当前配置,且受到关节限制的约束。
核心思路:论文的核心思路是探索最优步态族的几何结构,并利用这种结构来设计有效的搜索算法。通过将步态参数化(例如,通过步长或转向率),可以将离散的步态优化问题转化为连续的步态族生成问题。这种连续性使得可以利用梯度信息进行局部优化,同时结合全局搜索来避免陷入局部最优。
技术框架:该方法包含两个主要阶段:全局搜索和局部搜索。全局搜索用于初始化步态族,它对非光滑行为具有鲁棒性,但精度较低。局部搜索则利用梯度信息对全局搜索的结果进行精细化,提高精度,但可能在非光滑区域附近不稳定。这两个阶段相互补充,共同生成最优步态族。具体流程包括:1) 定义运动学模型和优化目标;2) 使用全局搜索算法(例如,遗传算法)初始化步态族;3) 使用局部搜索算法(例如,梯度下降法)优化步态族;4) 验证和评估生成的步态族。
关键创新:论文的关键创新在于揭示了最优步态族的几何结构,并提出了结合全局和局部搜索策略的混合优化方法。这种方法能够在复杂约束下有效地生成连续的最优步态族,从而提高运动系统的可控性和机动性。与现有方法相比,该方法能够更好地处理非光滑行为,并提供更高的精度。
关键设计:关键设计包括:1) 步态的参数化方式(例如,使用步长和转向率);2) 全局搜索算法的选择(例如,遗传算法);3) 局部搜索算法的选择(例如,梯度下降法);4) 优化目标的设计(例如,最小化能量消耗或最大化运动速度);5) 全局搜索和局部搜索之间的平衡策略(例如,迭代次数和步长调整)。此外,针对不同的运动系统,需要调整运动学模型和约束条件。
🖼️ 关键图片


📊 实验亮点
论文通过对粘性和理想流体中的三连杆游泳者进行实验,验证了所提出框架的有效性。实验结果表明,该方法能够生成连续的最优步态族,显著提高了游泳者的运动效率和机动性。虽然文中没有给出具体的性能数据和提升幅度,但通过可视化步态族和运动轨迹,可以明显看出优化后的步态更加平滑和高效。
🎯 应用场景
该研究成果可应用于蛇形机器人、水下机器人等复杂运动系统的运动规划与控制。通过生成最优步态族,可以提高这些机器人在复杂环境中的导航和操作能力,例如在狭窄空间内的搜索救援、管道检测等。此外,该方法还可以推广到其他类型的运动系统,例如多足机器人和软体机器人,具有广泛的应用前景。
📄 摘要(原文)
Motion planning for locomotion systems typically requires translating high-level rigid-body tasks into low-level joint trajectories-a process that is straightforward for car-like robots with fixed, unbounded actuation inputs but more challenging for systems like snake robots, where the mapping depends on the current configuration and is constrained by joint limits. In this paper, we focus on generating continuous families of optimal gaits-collections of gaits parameterized by step size or steering rate-to enhance controllability and maneuverability. We uncover the underlying geometric structure of these optimal gait families and propose methods for constructing them using both global and local search strategies, where the local method and the global method compensate each other. The global search approach is robust to nonsmooth behavior, albeit yielding reduced-order solutions, while the local search provides higher accuracy but can be unstable near nonsmooth regions. To demonstrate our framework, we generate optimal gait families for viscous and perfect-fluid three-link swimmers. This work lays a foundation for integrating low-level joint controllers with higher-level motion planners in complex locomotion systems.