RobotIQ: Empowering Mobile Robots with Human-Level Planning for Real-World Execution
作者: Emmanuel K. Raptis, Athanasios Ch. Kapoutsis, Elias B. Kosmatopoulos
分类: cs.RO, eess.SY
发布日期: 2025-02-18
🔗 代码/项目: GITHUB
💡 一句话要点
RobotIQ:赋予移动机器人人类水平的规划能力,用于真实世界执行
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 移动机器人 自然语言处理 大型语言模型 机器人规划 ROS 人机交互 家庭服务机器人
📋 核心要点
- 现有机器人系统在理解和执行复杂的人类指令方面存在不足,难以在真实环境中灵活应用。
- RobotIQ框架利用大型语言模型,使机器人能够理解自然语言指令,并将其转化为可执行的动作序列。
- 通过模拟和真实世界的实验验证,RobotIQ在家庭服务场景中展现了其有效性,尤其是在老年人辅助应用方面。
📝 摘要(中文)
本文介绍了一种名为RobotIQ的框架,该框架赋予移动机器人人类水平的规划能力,通过任何大型语言模型实现自然语言指令的无缝通信。该框架采用ROS架构设计,旨在弥合人与机器人之间的差距,使机器人能够理解和执行用户表达的文本或语音命令。我们的研究涵盖了广泛的机器人任务,从基本的逻辑、数学和学习推理,到在导航、操作和对象定位等领域中转移知识,从而能够将从模拟环境中学习到的行为应用于真实世界的操作。RobotIQ包含在一个模块化的机器人库套件中,该套件具有API控制功能,提供了一个功能齐全的基于AI-ROS的工具集,使研究人员能够设计和开发针对特定应用和机器人配置量身定制的机器人动作。所提出的系统的有效性在模拟和真实世界的实验中都得到了测试和验证,重点是家庭服务场景,其中包括为老年人设计的辅助应用程序。RobotIQ带有一个开源、易于使用且适应性强的机器人库套件,适用于任何机器人,可在https://github.com/emmarapt/RobotIQ找到。
🔬 方法详解
问题定义:现有移动机器人难以直接理解和执行人类以自然语言表达的复杂指令,导致人机交互效率低下,应用场景受限。痛点在于机器人缺乏足够强大的规划和推理能力,无法将高级指令分解为具体的底层控制动作。
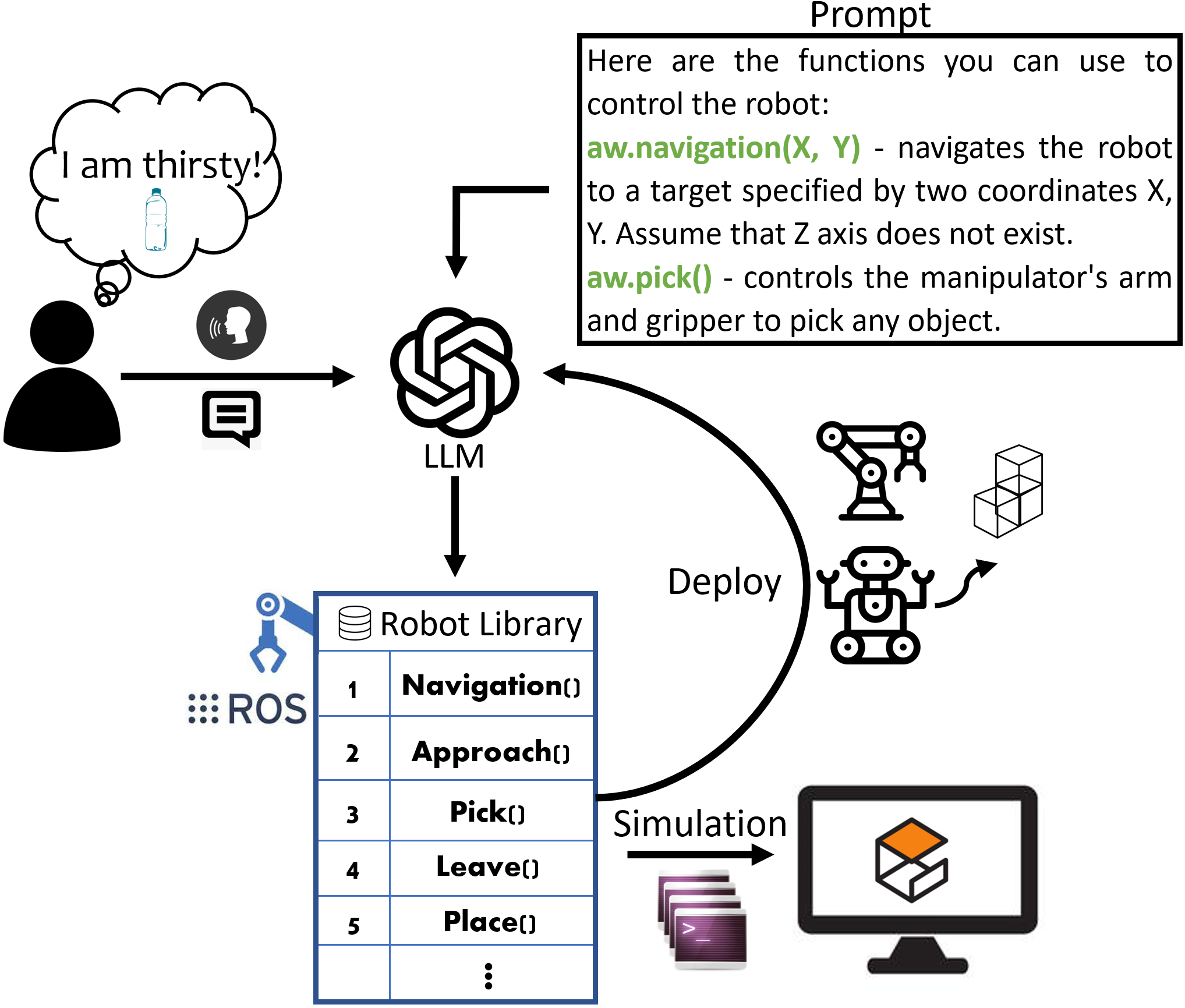
核心思路:RobotIQ的核心思路是利用大型语言模型(LLM)作为人机交互的桥梁,将人类的自然语言指令转化为机器人可以理解和执行的任务规划。通过模块化的机器人库,将高级规划转化为底层的机器人控制指令,实现端到端的任务执行。
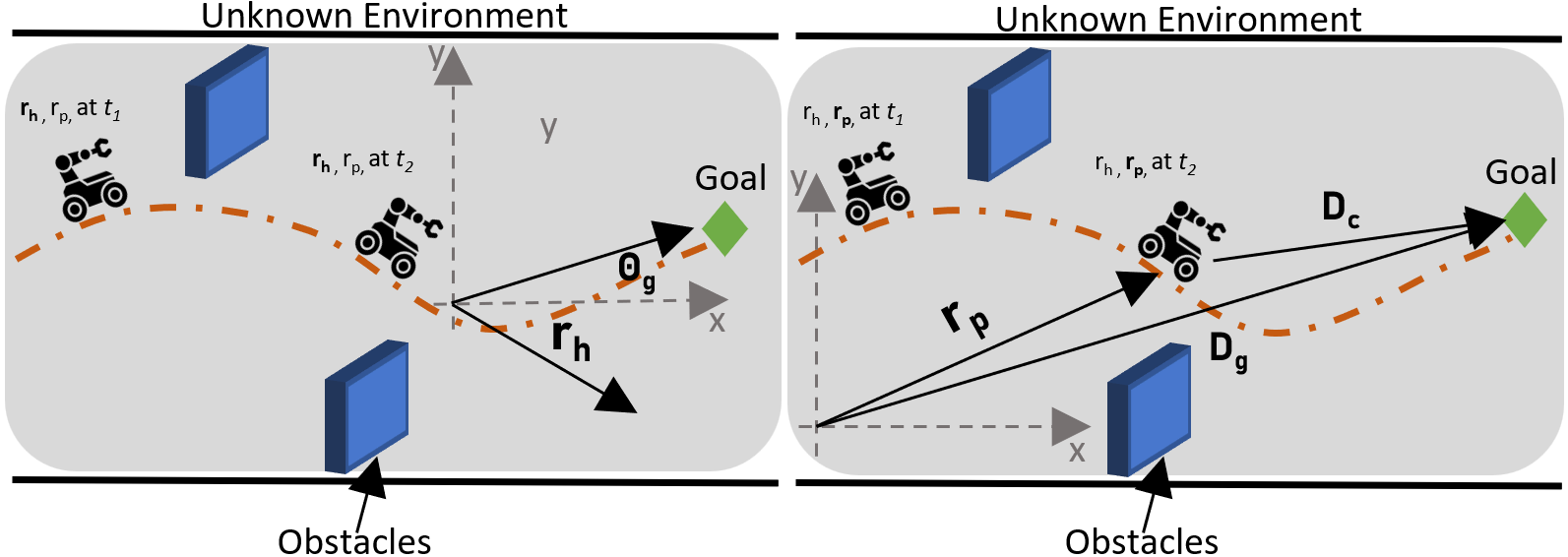
技术框架:RobotIQ框架基于ROS架构,包含以下主要模块:1) 自然语言理解模块:使用LLM解析用户输入的自然语言指令,提取关键信息和目标。2) 任务规划模块:根据提取的信息,生成机器人需要执行的任务序列。3) 机器人控制模块:将任务序列转化为具体的机器人动作指令,例如导航、操作等。4) 机器人库:提供了一系列API控制函数,用于控制机器人的各种动作。
关键创新:RobotIQ的关键创新在于将大型语言模型与ROS机器人控制框架相结合,实现了自然语言指令到机器人动作的无缝转换。通过模块化的设计,使得系统具有良好的可扩展性和可定制性,可以方便地应用于不同的机器人平台和应用场景。
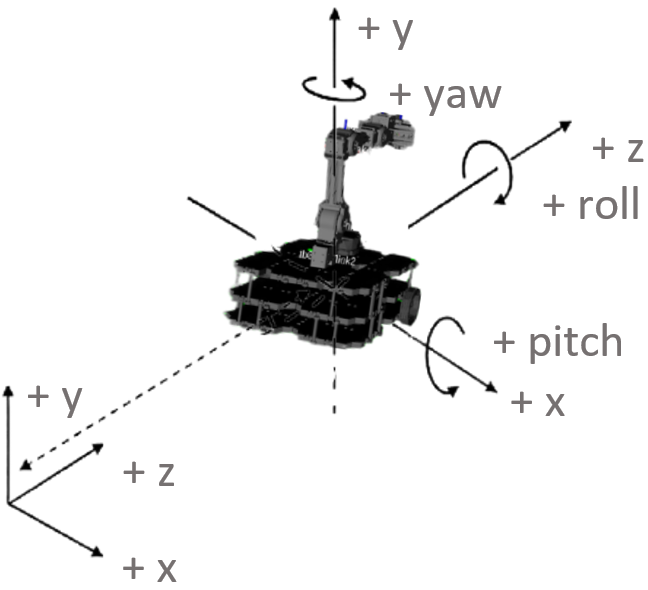
关键设计:RobotIQ的关键设计包括:1) 针对不同机器人平台和应用场景,设计了相应的机器人库,提供了一系列API控制函数。2) 使用LLM进行自然语言理解时,需要进行适当的prompt工程,以提高指令解析的准确性和效率。3) 在任务规划模块中,需要考虑机器人的运动学和动力学约束,以确保生成的任务序列是可行的。
🖼️ 关键图片
📊 实验亮点
该论文通过模拟和真实世界的实验验证了RobotIQ框架的有效性。在家庭服务场景中,RobotIQ能够成功地执行用户以自然语言表达的指令,例如“去厨房拿一杯水”、“把垃圾扔到垃圾桶里”等。实验结果表明,RobotIQ能够显著提高人机交互的效率和机器人的自主性。
🎯 应用场景
RobotIQ框架具有广泛的应用前景,例如家庭服务机器人、医疗辅助机器人、工业自动化机器人等。它可以帮助老年人、残疾人等弱势群体更好地生活,提高工业生产效率,降低人工成本。未来,RobotIQ有望成为机器人领域的重要技术,推动机器人技术的普及和应用。
📄 摘要(原文)
This paper introduces RobotIQ, a framework that empowers mobile robots with human-level planning capabilities, enabling seamless communication via natural language instructions through any Large Language Model. The proposed framework is designed in the ROS architecture and aims to bridge the gap between humans and robots, enabling robots to comprehend and execute user-expressed text or voice commands. Our research encompasses a wide spectrum of robotic tasks, ranging from fundamental logical, mathematical, and learning reasoning for transferring knowledge in domains like navigation, manipulation, and object localization, enabling the application of learned behaviors from simulated environments to real-world operations. All encapsulated within a modular crafted robot library suite of API-wise control functions, RobotIQ offers a fully functional AI-ROS-based toolset that allows researchers to design and develop their own robotic actions tailored to specific applications and robot configurations. The effectiveness of the proposed system was tested and validated both in simulated and real-world experiments focusing on a home service scenario that included an assistive application designed for elderly people. RobotIQ with an open-source, easy-to-use, and adaptable robotic library suite for any robot can be found at https://github.com/emmarapt/RobotIQ.