pySLAM: An Open-Source, Modular, and Extensible Framework for SLAM
作者: Luigi Freda
分类: cs.RO, cs.CV
发布日期: 2025-02-17 (更新: 2025-08-02)
💡 一句话要点
pySLAM:一个开源、模块化和可扩展的SLAM框架,支持多种相机输入。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉SLAM 开源框架 模块化设计 Python 机器人导航
📋 核心要点
- 现有视觉SLAM系统在灵活性和可扩展性方面存在不足,难以快速集成新的算法和模块。
- pySLAM通过模块化设计和Python接口,简化了SLAM系统的开发和实验流程,方便研究人员快速原型设计。
- 该框架支持多种相机类型和特征提取方法,并提供了丰富的工具用于评估和比较不同的SLAM模块。
📝 摘要(中文)
pySLAM是一个开源的Python视觉SLAM框架,支持单目、双目和RGB-D相机输入。它提供了一个灵活且模块化的接口,集成了广泛的经典和基于学习的局部特征。该框架包括多种回环检测策略、一个体素重建流程以及对深度预测模型的支持。它还提供了一套全面的工具,用于实验和评估视觉里程计和SLAM模块。pySLAM专为初学者和经验丰富的研究人员设计,强调快速原型设计、可扩展性和跨不同数据集的可重复性。其模块化架构促进了自定义组件的集成,并鼓励桥接传统方法和基于深度学习方法的研究。欢迎社区贡献,以促进视觉SLAM领域的协作开发和创新。本文档介绍了pySLAM框架,概述了其主要组件、特性和用法。
🔬 方法详解
问题定义:现有视觉SLAM框架通常较为封闭,难以集成新的算法和模块,限制了研究人员的实验和创新。此外,缺乏统一的评估工具也使得不同SLAM算法的比较变得困难。
核心思路:pySLAM的核心思路是提供一个开源、模块化和可扩展的SLAM框架,允许研究人员轻松地集成自定义组件,并提供全面的评估工具。通过使用Python作为主要编程语言,降低了开发门槛,促进了社区的参与和贡献。
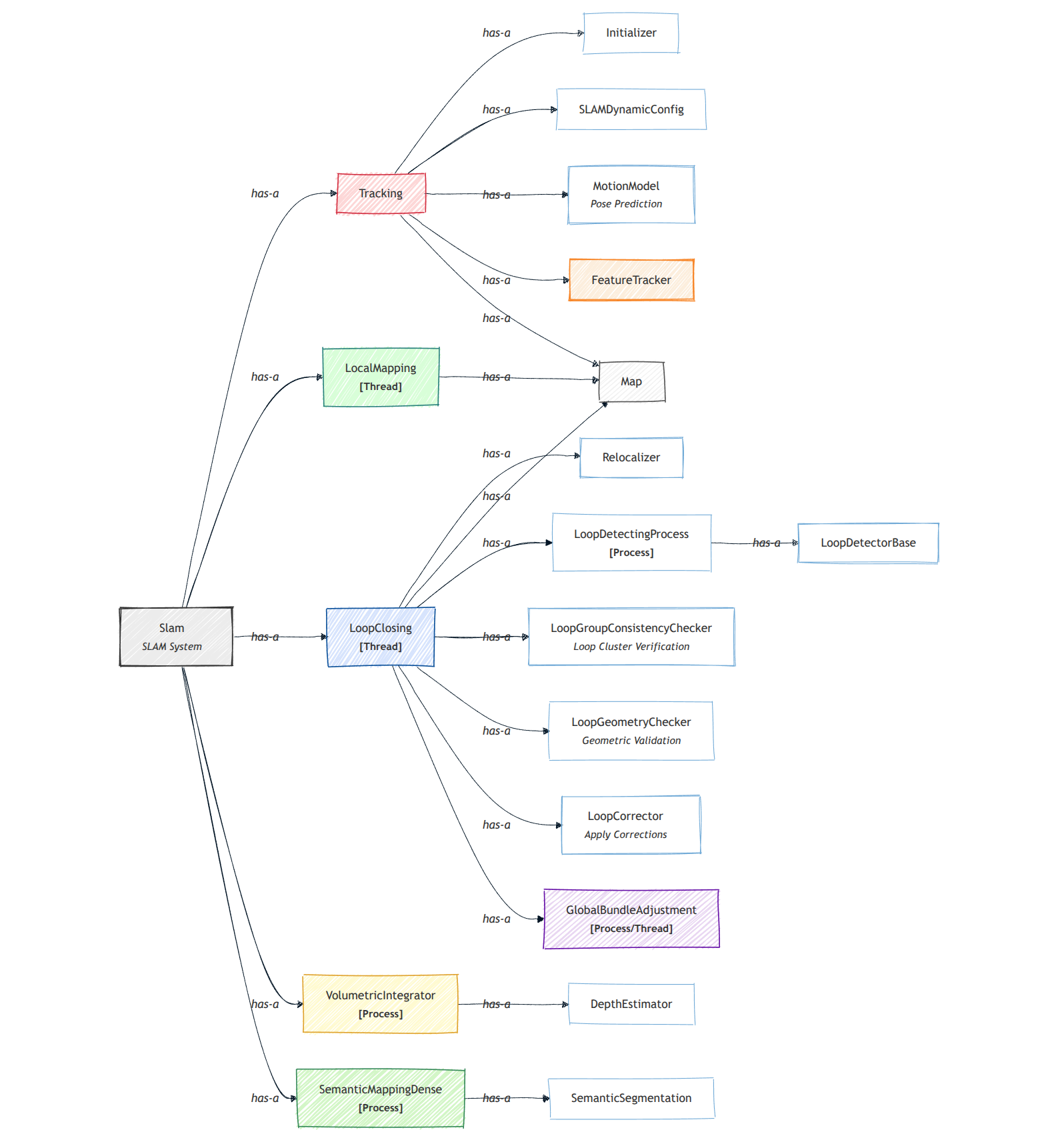
技术框架:pySLAM的整体架构包括以下几个主要模块:1) 数据输入模块,支持单目、双目和RGB-D相机;2) 特征提取模块,集成了多种经典和基于学习的局部特征;3) 视觉里程计模块,用于估计相机的运动轨迹;4) 回环检测模块,用于检测并纠正累积误差;5) 体素重建模块,用于生成三维地图。
关键创新:pySLAM最重要的技术创新在于其模块化的设计和Python接口。这种设计使得研究人员可以轻松地替换或添加新的模块,例如新的特征提取算法、新的回环检测策略或新的深度预测模型。此外,pySLAM还提供了一套全面的评估工具,用于比较不同SLAM模块的性能。
关键设计:pySLAM的关键设计包括:1) 使用Python作为主要编程语言,降低开发门槛;2) 采用模块化设计,方便组件的集成和替换;3) 提供统一的接口,简化不同模块之间的交互;4) 提供全面的评估工具,用于比较不同SLAM模块的性能。具体的参数设置、损失函数和网络结构取决于所使用的具体模块。
🖼️ 关键图片


📊 实验亮点
由于论文主要介绍框架本身,并未提供具体的实验结果。但其开源的特性和模块化的设计,使得研究人员可以方便地在各种数据集上进行实验,并比较不同SLAM模块的性能。该框架为视觉SLAM算法的快速原型设计和评估提供了一个有力的工具。
🎯 应用场景
pySLAM可应用于机器人导航、增强现实、虚拟现实、三维重建等领域。其开源和模块化的特性使得研究人员可以快速构建和定制SLAM系统,从而加速相关领域的研究和应用。此外,pySLAM还可以作为教育工具,帮助学生学习和理解SLAM算法。
📄 摘要(原文)
pySLAM is an open-source Python framework for Visual SLAM that supports monocular, stereo, and RGB-D camera inputs. It offers a flexible and modular interface, integrating a broad range of both classical and learning-based local features. The framework includes multiple loop closure strategies, a volumetric reconstruction pipeline, and support for depth prediction models. It also offers a comprehensive set of tools for experimenting with and evaluating visual odometry and SLAM modules. Designed for both beginners and experienced researchers, pySLAM emphasizes rapid prototyping, extensibility, and reproducibility across diverse datasets. Its modular architecture facilitates the integration of custom components and encourages research that bridges traditional and deep learning-based approaches. Community contributions are welcome, fostering collaborative development and innovation in the field of Visual SLAM. This document presents the pySLAM framework, outlining its main components, features, and usage.