Safety Evaluation of Human Arm Operations Using IMU Sensors with a Spring-Damper-Mass Predictive Model
作者: Musab Zubair Inamdar, Seyed Amir Tafrishi
分类: cs.RO
发布日期: 2025-02-13
💡 一句话要点
提出基于腕部IMU与弹簧-阻尼-质量预测模型的协作机器人安全评估方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人机协作 安全评估 IMU传感器 预测安全模型 弹簧-阻尼-质量模型
📋 核心要点
- 现有的人机协作安全监控方法在腕部运动的精确建模和实时性方面存在挑战。
- 本文提出了一种基于腕部IMU和弹簧-阻尼-质量模型的预测安全模型,用于实时评估人机协作中的安全风险。
- 实验结果表明,该方法在多种制造任务中表现出鲁棒性,并通过参数优化保证了计算效率。
📝 摘要(中文)
本文提出了一种新颖的实时安全监控方法,用于人机协作制造环境。该方法通过集成腕部安装的惯性测量单元(IMU)系统和预测安全模型(PSM)来实现。所提出的系统扩展了先前的PSM实现,通过采用专门为腕部运动优化的弹簧-阻尼-质量模型,并利用基于阻抗的计算进行概率安全评估。我们使用频域方法分析了我们提出的基于阻抗的安全方法,通过全面的比较分析建立了定量的安全阈值。在工具操作、视觉检查和拾取放置操作这三个制造任务中的实验验证表明,该方法在各种制造场景中表现出强大的性能,同时通过优化的参数选择保持了计算效率。这项工作为未来人机协作制造环境中实时自适应风险评估的发展奠定了基础。
🔬 方法详解
问题定义:论文旨在解决人机协作制造环境中,如何实时、准确地评估操作人员腕部运动的安全风险问题。现有方法在精确建模腕部复杂运动,以及保证实时计算效率方面存在不足,难以满足实际应用需求。
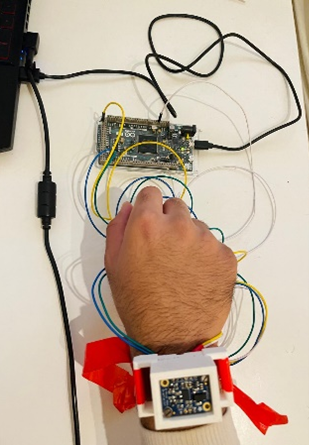
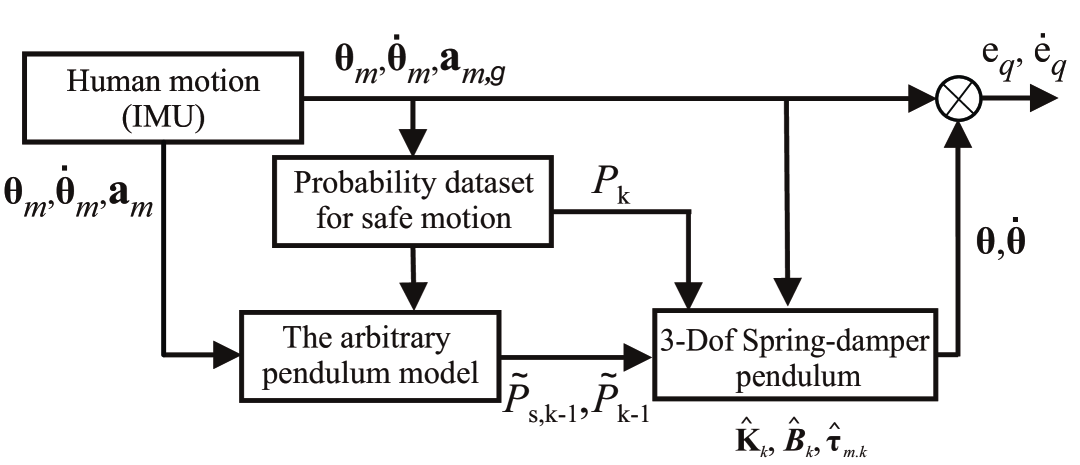
核心思路:论文的核心思路是利用腕部安装的IMU传感器获取运动数据,并结合弹簧-阻尼-质量模型来预测腕部运动轨迹。通过分析预测轨迹与实际轨迹的偏差,并结合阻抗控制理论,评估潜在的碰撞风险,从而实现实时安全监控。
技术框架:该安全评估系统的整体框架包括以下几个主要模块:1) IMU数据采集模块:负责从腕部IMU传感器获取角速度和加速度数据。2) 运动预测模块:利用弹簧-阻尼-质量模型,基于IMU数据预测腕部运动轨迹。3) 安全评估模块:计算预测轨迹与实际轨迹的偏差,并结合阻抗参数,评估碰撞风险。4) 安全阈值设定与监控模块:根据实验数据和频域分析,设定安全阈值,并实时监控安全状态。
关键创新:该方法的关键创新在于:1) 针对腕部运动特性,优化了弹簧-阻尼-质量模型,提高了运动预测的准确性。2) 结合阻抗控制理论,将碰撞风险转化为阻抗参数的评估,实现了概率安全评估。3) 通过频域分析,建立了定量的安全阈值,提高了安全评估的可靠性。
关键设计:在模型参数设置方面,论文通过实验数据和优化算法,确定了弹簧刚度、阻尼系数和质量参数的最佳值。在安全阈值设定方面,论文采用频域分析方法,分析了不同运动状态下的阻抗特性,并根据实验数据设定了安全阈值。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在工具操作、视觉检查和拾取放置等三种典型制造任务中均表现出良好的鲁棒性。通过优化参数选择,该方法在保证安全评估准确性的同时,实现了较高的计算效率,满足了实时性要求。具体的性能数据(例如,碰撞预测准确率、安全阈值误报率等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种人机协作制造场景,例如汽车装配、电子产品制造、航空航天等领域。通过实时安全监控,可以有效降低人机碰撞风险,提高生产效率,并改善操作人员的工作环境。未来,该技术还可扩展到其他人体部位的安全监控,例如手臂、头部等,实现更全面的人机协作安全保障。
📄 摘要(原文)
This paper presents a novel approach to real-time safety monitoring in human-robot collaborative manufacturing environments through a wrist-mounted Inertial Measurement Unit (IMU) system integrated with a Predictive Safety Model (PSM). The proposed system extends previous PSM implementations through the adaptation of a spring-damper-mass model specifically optimized for wrist motions, employing probabilistic safety assessment through impedance-based computations. We analyze our proposed impedance-based safety approach with frequency domain methods, establishing quantitative safety thresholds through comprehensive comparative analysis. Experimental validation across three manufacturing tasks - tool manipulation, visual inspection, and pick-and-place operations. Results show robust performance across diverse manufacturing scenarios while maintaining computational efficiency through optimized parameter selection. This work establishes a foundation for future developments in adaptive risk assessment in real-time for human-robot collaborative manufacturing environments.