Automatic Robot Task Planning by Integrating Large Language Model with Genetic Programming
作者: Azizjon Kobilov, Jianglin Lan
分类: cs.RO, eess.SY
发布日期: 2025-02-11
备注: Submitted to IEEE Conference
💡 一句话要点
提出LLM-GP-BT方法,结合大语言模型与遗传规划自动生成机器人任务规划行为树
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人任务规划 行为树 大语言模型 遗传规划 自主系统
📋 核心要点
- 为机器人生成可靠的行为树控制策略面临挑战,需要领域专家知识且过程复杂。
- LLM-GP-BT方法利用大语言模型理解自然语言指令,并结合遗传规划自动生成行为树。
- 仿真实验验证了该方法在自主系统任务规划中的潜力,有望简化任务规划流程。
📝 摘要(中文)
精确的任务规划对于控制自主系统至关重要,例如机器人、无人机和自动驾驶车辆。行为树(BTs)因其模块化、灵活性和可重用性而被认为是任务规划中最突出的控制策略定义框架之一。为机器人系统生成可靠且准确的基于BT的控制策略仍然具有挑战性,并且通常需要领域专业知识。本文提出了一种LLM-GP-BT技术,该技术利用大型语言模型(LLM)和遗传规划(GP)来自动生成和配置BT。LLM-GP-BT技术处理以人类自然语言表达的机器人任务命令,并以计算高效且用户友好的方式将其转换为准确可靠的基于BT的任务计划。通过仿真实验对所提出的技术进行了系统地开发和验证,证明了其简化自主系统任务规划的潜力。
🔬 方法详解
问题定义:现有机器人任务规划方法,特别是基于行为树(BT)的方法,通常需要人工设计和调整,这需要领域专家知识,并且耗时耗力。对于复杂任务,手动设计BT容易出错,难以保证任务的可靠性和准确性。因此,如何自动生成可靠且准确的BT,降低对领域专家的依赖,是本文要解决的核心问题。
核心思路:本文的核心思路是结合大语言模型(LLM)的自然语言理解能力和遗传规划(GP)的自动搜索能力,构建一个自动生成BT的框架。LLM负责将人类自然语言描述的任务指令转化为机器可理解的形式,GP负责在可能的BT结构空间中搜索最优的BT配置。通过这种结合,可以实现从自然语言指令到可执行的机器人任务计划的自动转换。
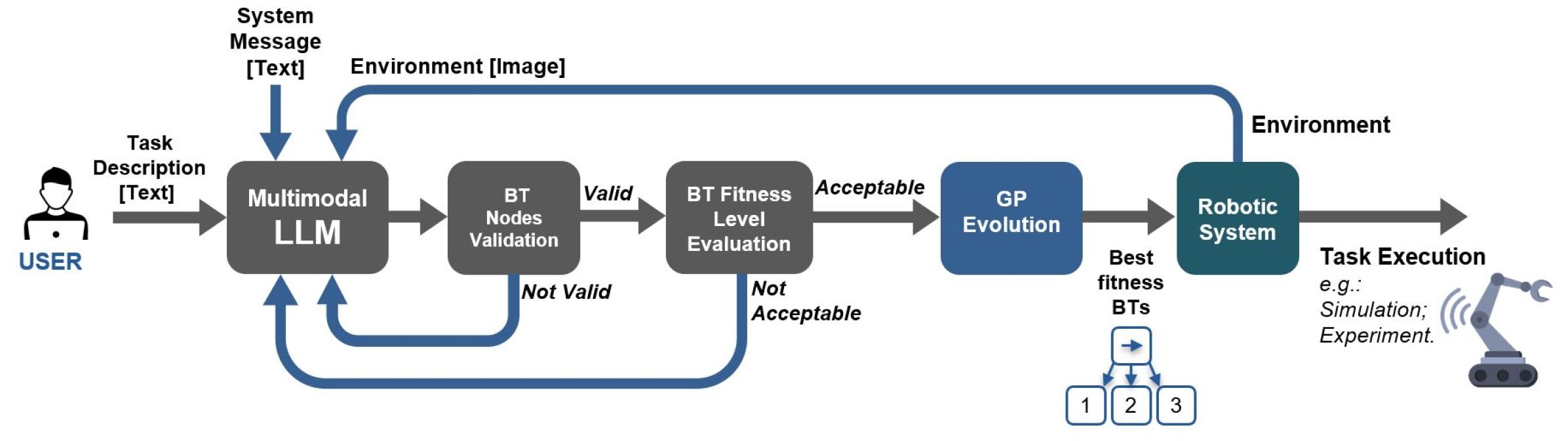
技术框架:LLM-GP-BT技术框架主要包含以下几个模块: 1. 自然语言指令解析模块:使用LLM将自然语言描述的任务指令解析为结构化的任务描述,例如任务目标、约束条件等。 2. BT结构初始化模块:基于任务描述,初始化一组随机的BT结构作为GP的初始种群。 3. GP进化模块:使用遗传算法对BT结构进行进化,包括选择、交叉和变异等操作。每个BT结构的适应度通过仿真评估其在完成任务时的性能来确定。 4. BT优化模块:对进化后的BT结构进行优化,例如简化BT结构、调整BT节点的参数等。 5. BT执行模块:将优化后的BT部署到机器人系统上执行任务。
关键创新:该方法最重要的创新点在于将LLM和GP结合起来,实现了从自然语言指令到可执行的机器人任务计划的自动转换。传统的GP方法通常需要人工定义适应度函数和遗传算子,而本文利用LLM的自然语言理解能力,可以自动生成适应度函数,并根据任务描述自动调整遗传算子。这大大降低了对领域专家的依赖,提高了任务规划的效率和灵活性。
关键设计: 1. LLM选择:选择具有较强自然语言理解能力的LLM,例如GPT-3或类似模型,并对其进行微调,使其更适合机器人任务规划领域。 2. 适应度函数设计:适应度函数用于评估BT结构的性能,可以根据任务目标和约束条件进行设计。例如,对于导航任务,适应度函数可以包括到达目标点的距离、避障成功率等。 3. 遗传算子设计:遗传算子包括选择、交叉和变异等操作,用于对BT结构进行进化。可以根据BT结构的特点设计专门的遗传算子,例如针对序列节点的交叉算子、针对选择节点的变异算子等。
🖼️ 关键图片

📊 实验亮点
论文通过仿真实验验证了LLM-GP-BT方法的有效性。实验结果表明,该方法能够自动生成可靠且准确的BT,完成复杂的机器人任务。虽然具体性能数据和对比基线未在摘要中提及,但强调了该方法在简化自主系统任务规划方面的潜力。
🎯 应用场景
该研究成果可广泛应用于各种自主系统,如服务机器人、工业机器人、无人机和自动驾驶车辆等。通过自然语言指令即可实现复杂的任务规划,降低了使用门槛,使得非专业人员也能轻松操控机器人完成特定任务。未来,该技术有望推动机器人智能化水平的提升,并促进人机协作的广泛应用。
📄 摘要(原文)
Accurate task planning is critical for controlling autonomous systems, such as robots, drones, and self-driving vehicles. Behavior Trees (BTs) are considered one of the most prominent control-policy-defining frameworks in task planning, due to their modularity, flexibility, and reusability. Generating reliable and accurate BT-based control policies for robotic systems remains challenging and often requires domain expertise. In this paper, we present the LLM-GP-BT technique that leverages the Large Language Model (LLM) and Genetic Programming (GP) to automate the generation and configuration of BTs. The LLM-GP-BT technique processes robot task commands expressed in human natural language and converts them into accurate and reliable BT-based task plans in a computationally efficient and user-friendly manner. The proposed technique is systematically developed and validated through simulation experiments, demonstrating its potential to streamline task planning for autonomous systems.