Wheeled Lab: Modern Sim2Real for Low-cost, Open-source Wheeled Robotics
作者: Tyler Han, Preet Shah, Sidharth Rajagopal, Yanda Bao, Sanghun Jung, Sidharth Talia, Gabriel Guo, Bryan Xu, Bhaumik Mehta, Emma Romig, Rosario Scalise, Byron Boots
分类: cs.RO
发布日期: 2025-02-11 (更新: 2025-08-30)
备注: To appear at Conference on Robot Learning, 2025
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
Wheeled Lab:低成本开源轮式机器人Sim2Real平台与零样本策略
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 轮式机器人 强化学习 Sim2Real 开源平台 机器人教育
📋 核心要点
- 现有机器人强化学习研究依赖昂贵硬件和复杂工具链,阻碍了更广泛社区的参与和学习。
- Wheeled Lab 旨在提供一个低成本、开源的轮式机器人平台,结合 Isaac Lab 模拟器,促进机器人学习研究。
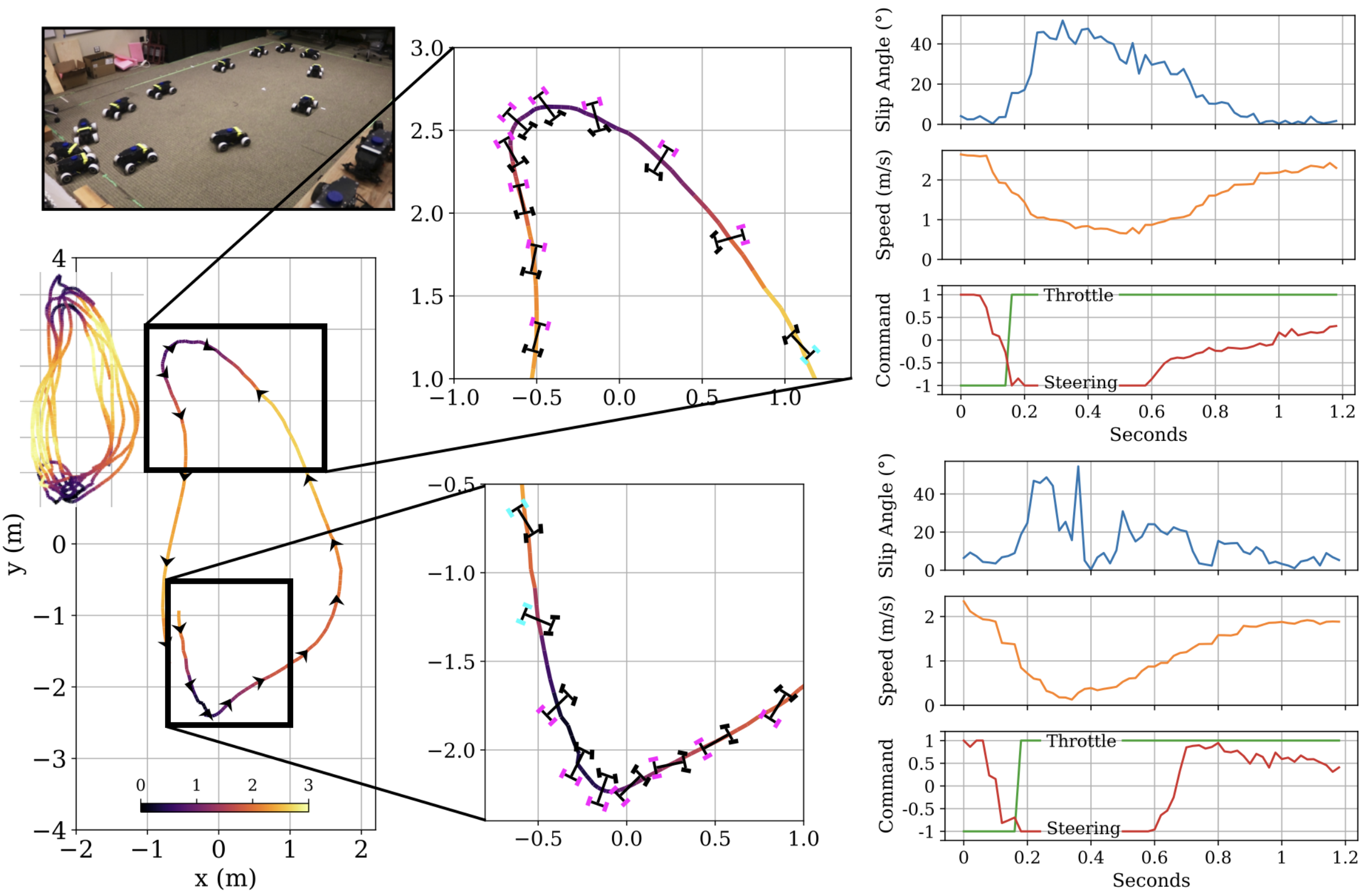
- 论文展示了基于 Wheeled Lab 开发的零样本策略,包括受控漂移、地形穿越和视觉导航,验证了平台有效性。
📝 摘要(中文)
强化学习(RL)在近期的机器人技术里程碑中发挥了关键作用,并有望在未来扮演更重要的角色。然而,这些进展可能依赖于专有的模拟器、昂贵的硬件以及大量的工具和技能。因此,更广泛的社区与最先进的技术脱节;教育课程也难以教授涉及硬件、部署和迭代开发等不可或缺的现代机器人技术技能。为了弥合更广泛的社区与科学社区之间的差距,我们贡献了Wheeled Lab,一个集成了易于使用的开源轮式机器人与Isaac Lab(一个被广泛采用的开源机器人学习和模拟框架)的生态系统。为了启动研究和教育,这项工作展示了通过Wheeled Lab开发的用于小型遥控车的三个最先进的零样本策略:受控漂移、地形穿越和视觉导航。从硬件到软件的整个堆栈都是低成本和开源的。
🔬 方法详解
问题定义:现有机器人强化学习研究面临着高昂的硬件成本和复杂的软件工具链,这使得广大的研究人员和教育工作者难以参与到最前沿的机器人技术研究中。此外,许多先进的机器人学习方法依赖于专有的模拟器,进一步限制了其可访问性和可复现性。因此,如何降低机器人研究的门槛,并提供一个开放、易用的平台,成为了一个亟待解决的问题。
核心思路:Wheeled Lab 的核心思路是构建一个低成本、开源的轮式机器人平台,并将其与一个广泛使用的开源机器人模拟框架(Isaac Lab)集成。通过这种方式,研究人员和教育工作者可以使用廉价的硬件和免费的软件工具来进行机器人学习研究,从而降低了研究的门槛。此外,该平台还提供了一系列预训练的零样本策略,可以作为研究的起点。
技术框架:Wheeled Lab 的整体架构包括三个主要部分:硬件平台、软件平台和预训练策略。硬件平台是一个低成本的轮式机器人,可以根据用户的需求进行定制。软件平台是 Isaac Lab 模拟器,提供了一个逼真的机器人仿真环境。预训练策略包括受控漂移、地形穿越和视觉导航等任务,可以作为研究的起点。研究人员可以使用该平台进行强化学习算法的开发和测试,并将训练好的策略部署到真实的机器人上。
关键创新:Wheeled Lab 的关键创新在于其低成本、开源和易用性。与传统的机器人研究平台相比,Wheeled Lab 的硬件成本大大降低,并且所有的软件工具都是开源的。此外,该平台还提供了一系列预训练的零样本策略,可以帮助研究人员快速入门。
关键设计:Wheeled Lab 的关键设计包括以下几个方面:1) 低成本的硬件平台:该平台使用廉价的遥控车作为硬件基础,并提供详细的硬件组装指南。2) 开源的软件平台:该平台使用 Isaac Lab 模拟器,并提供详细的软件安装和配置指南。3) 预训练的零样本策略:该平台提供了一系列预训练的零样本策略,可以作为研究的起点。4) 模块化的设计:该平台采用模块化的设计,方便用户进行定制和扩展。
🖼️ 关键图片


📊 实验亮点
论文展示了在 Wheeled Lab 平台上训练的三个零样本策略:受控漂移、地形穿越和视觉导航。这些策略可以直接部署到真实的机器人上,无需进行额外的训练。实验结果表明,这些策略在真实环境中表现良好,验证了 Wheeled Lab 平台的有效性。具体性能数据未知,但论文强调了零样本迁移的成功。
🎯 应用场景
Wheeled Lab 可应用于机器人教育、强化学习算法研究、自动驾驶等领域。它降低了机器人研究的门槛,使得更多人可以参与到机器人技术的开发和应用中。该平台可以用于开发各种机器人应用,例如自动驾驶、物流配送、安防巡逻等。未来,Wheeled Lab 有望成为机器人研究和教育的重要基础设施。
📄 摘要(原文)
Reinforcement Learning (RL) has been pivotal in recent robotics milestones and is poised to play a prominent role in the future. However, these advances can rely on proprietary simulators, expensive hardware, and a daunting range of tools and skills. As a result, broader communities are disconnecting from the state-of-the-art; education curricula are poorly equipped to teach indispensable modern robotics skills involving hardware, deployment, and iterative development. To address this gap between the broader and scientific communities, we contribute Wheeled Lab, an ecosystem which integrates accessible, open-source wheeled robots with Isaac Lab, an open-source robot learning and simulation framework, that is widely adopted in the state-of-the-art. To kickstart research and education, this work demonstrates three state-of-the-art zero-shot policies for small-scale RC cars developed through Wheeled Lab: controlled drifting, elevation traversal, and visual navigation. The full stack, from hardware to software, is low-cost and open-source. Videos and additional materials can be found at: https://uwrobotlearning.github.io/WheeledLab/