Infinite-Horizon Value Function Approximation for Model Predictive Control
作者: Armand Jordana, Sébastien Kleff, Arthur Haffemayer, Joaquim Ortiz-Haro, Justin Carpentier, Nicolas Mansard, Ludovic Righetti
分类: cs.RO
发布日期: 2025-02-10 (更新: 2025-11-03)
💡 一句话要点
提出基于神经网络的无限时域值函数近似方法,提升模型预测控制的全局稳定性和安全性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 值函数近似 神经网络 无限时域 机器人控制
📋 核心要点
- 传统模型预测控制受限于实时性,难以兼顾硬约束和长预测范围,影响安全性和稳定性。
- 利用神经网络近似无限时域值函数,并将其作为终端成本,提升模型预测控制的全局稳定性。
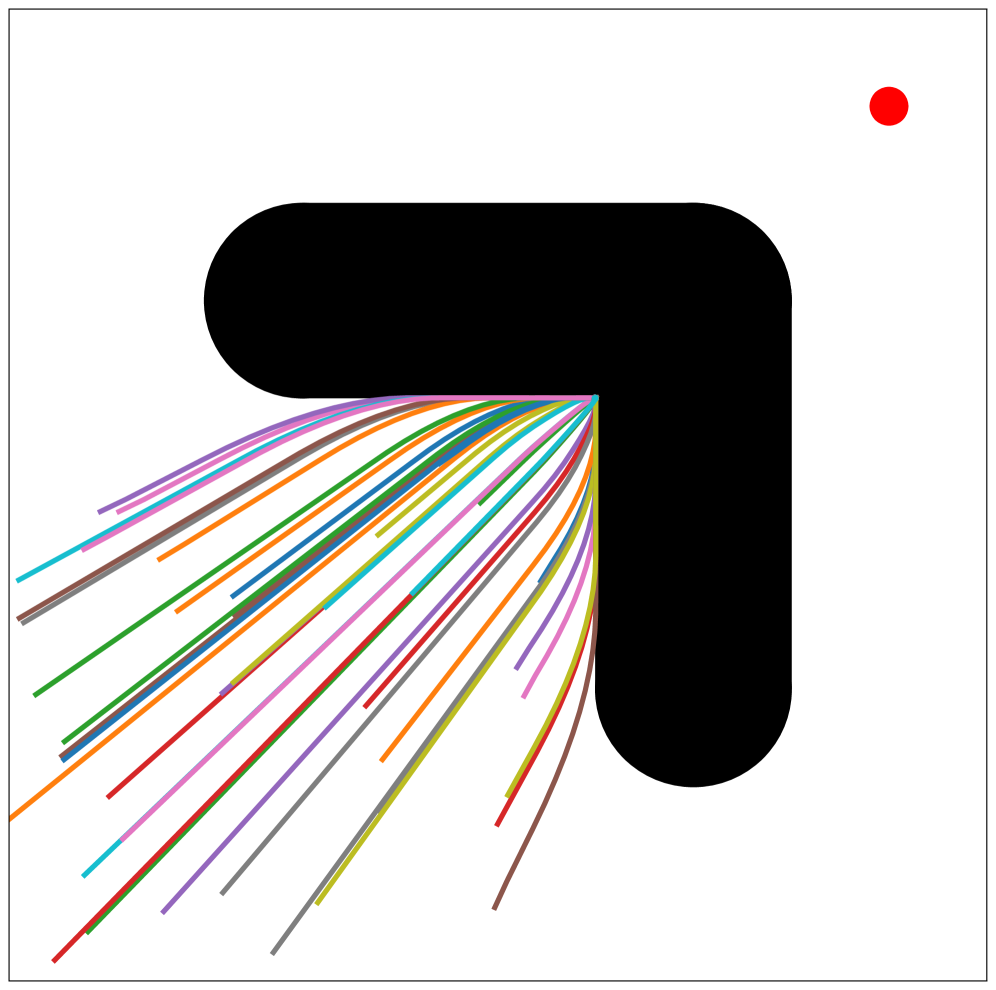
- 在玩具问题和真实机器人避障场景中验证了该方法,表明其在实际应用中的可行性。
📝 摘要(中文)
模型预测控制(MPC)已成为机器人生成复杂运动的常用工具。然而,实时性要求限制了硬约束和长预测范围的使用,而这两者对于确保安全性和稳定性至关重要。实践中,从业者必须仔细设计成本函数来模仿无限时域公式,这既繁琐又容易陷入局部最小值。本文研究如何使用值迭代和轨迹优化,通过神经网络近似约束最优控制问题的无限时域值函数。此外,实验证明,将此值函数近似作为终端成本可以为模型预测控制器提供全局稳定性。该方法在两个玩具问题和一个真实世界的场景中得到验证,该场景涉及工业机械臂上的在线避障,其中值函数以目标和障碍物为条件。
🔬 方法详解
问题定义:论文旨在解决模型预测控制(MPC)中由于实时性约束,无法使用足够长的预测范围和硬约束,导致系统稳定性和安全性难以保证的问题。现有方法通常需要手动设计成本函数来近似无限时域,过程繁琐且容易陷入局部最优解。
核心思路:论文的核心思路是利用神经网络来近似无限时域的值函数。通过学习值函数,MPC可以在有限的预测范围内获得接近无限时域的性能,从而提高稳定性和安全性。将学习到的值函数作为终端成本,引导MPC在有限步内达到期望状态,并保证后续轨迹的稳定性。
技术框架:该方法主要包含以下几个阶段:1) 使用值迭代或轨迹优化等方法生成训练数据;2) 使用神经网络学习无限时域值函数的近似;3) 将学习到的值函数作为模型预测控制器的终端成本。整体流程是先离线学习值函数,然后在在线控制中使用学习到的值函数。
关键创新:该方法最重要的创新点在于使用神经网络来近似无限时域的值函数,并将其集成到模型预测控制框架中。与传统方法相比,该方法可以自动学习值函数,避免了手动设计成本函数的繁琐过程,并且能够更好地处理复杂约束和非线性系统。
关键设计:论文中,神经网络的结构需要根据具体问题进行设计,常见的选择包括多层感知机(MLP)或循环神经网络(RNN)。损失函数通常包括值函数的Bellman误差和轨迹优化中的约束违反项。关键参数包括神经网络的层数、每层的神经元数量、学习率以及训练数据的规模。
🖼️ 关键图片


📊 实验亮点
论文在两个玩具问题和一个真实世界的工业机械臂避障场景中验证了该方法的有效性。实验结果表明,使用学习到的值函数作为终端成本可以显著提高模型预测控制器的全局稳定性,并使其能够成功避开障碍物。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于各种需要高安全性和稳定性的机器人控制场景,例如工业机器人、自动驾驶汽车、无人机等。通过学习无限时域值函数,可以使机器人在复杂环境中更加安全可靠地执行任务,并提高其适应性和鲁棒性。此外,该方法还可以推广到其他最优控制问题,例如能源管理、金融交易等。
📄 摘要(原文)
Model Predictive Control has emerged as a popular tool for robots to generate complex motions. However, the real-time requirement has limited the use of hard constraints and large preview horizons, which are necessary to ensure safety and stability. In practice, practitioners have to carefully design cost functions that can imitate an infinite horizon formulation, which is tedious and often results in local minima. In this work, we study how to approximate the infinite horizon value function of constrained optimal control problems with neural networks using value iteration and trajectory optimization. Furthermore, we experimentally demonstrate how using this value function approximation as a terminal cost provides global stability to the model predictive controller. The approach is validated on two toy problems and a real-world scenario with online obstacle avoidance on an industrial manipulator where the value function is conditioned to the goal and obstacle.