SIREN: Semantic, Initialization-Free Registration of Multi-Robot Gaussian Splatting Maps
作者: Ola Shorinwa, Jiankai Sun, Mac Schwager, Anirudha Majumdar
分类: cs.RO, cs.CV
发布日期: 2025-02-10
💡 一句话要点
SIREN:一种无需初始化的多机器人高斯溅射地图语义配准方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 多机器人系统 高斯溅射 地图配准 语义信息 无需初始化
📋 核心要点
- 现有方法在多机器人地图配准中通常需要相机位姿等初始化信息,限制了其应用范围和鲁棒性。
- SIREN利用语义信息,无需初始化即可实现多机器人高斯溅射地图的配准,提升了配准的鲁棒性和准确性。
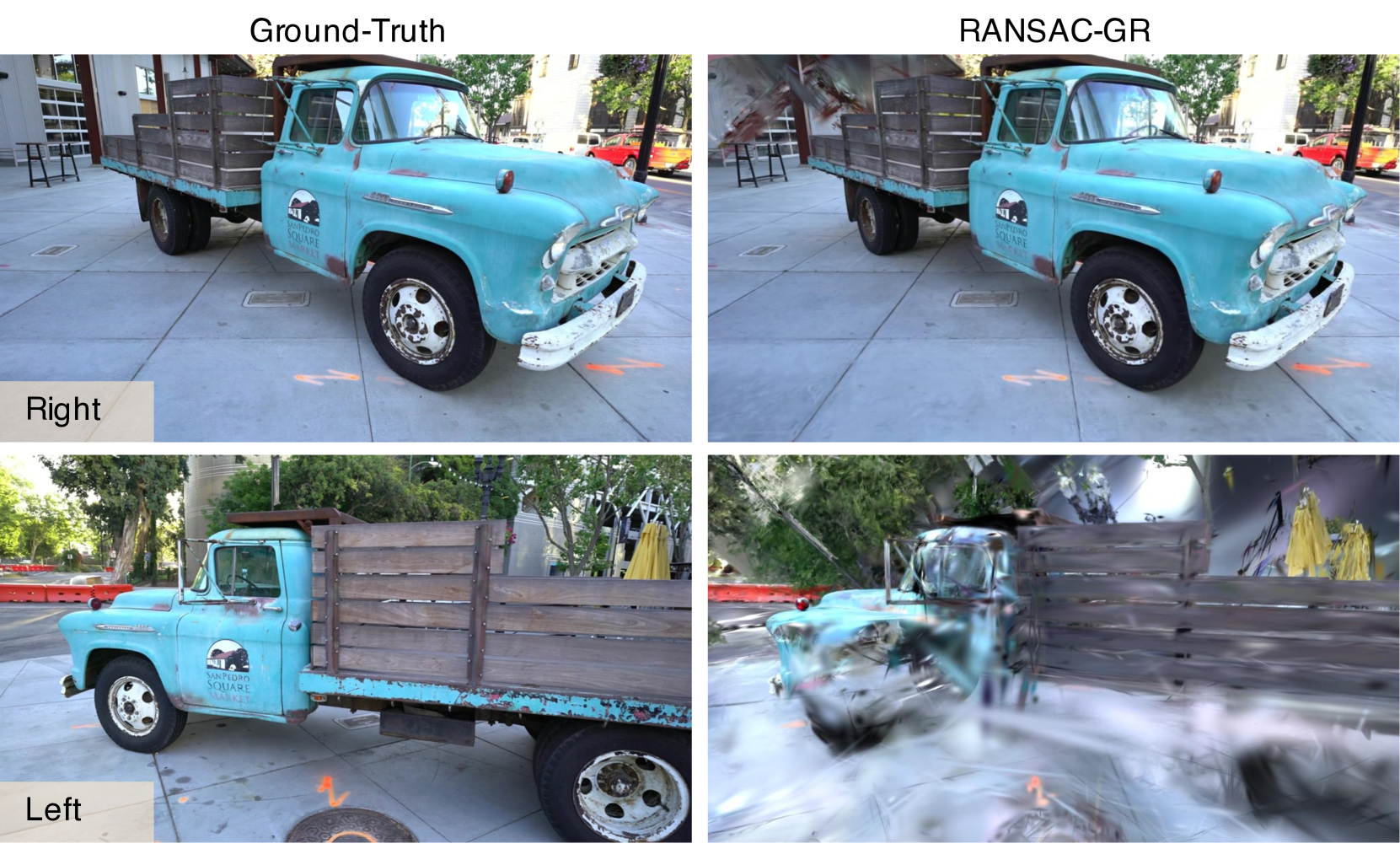
- 实验结果表明,SIREN在多种真实场景和机器人平台上,显著优于现有方法,尤其是在误差指标上取得了数量级的提升。
📝 摘要(中文)
本文提出SIREN,用于多机器人高斯溅射(GSplat)地图的配准,无需访问相机位姿、图像和地图间的变换来进行初始化或融合局部子地图。SIREN通过三个关键方式利用语义的多功能性和鲁棒性,为多机器人GSplat地图推导出一个严格的配准流程。首先,SIREN利用语义来识别局部地图中特征丰富的区域,从而更好地解决配准问题,消除了先前工作中通常需要的任何初始化。其次,SIREN使用鲁棒的语义特征识别局部地图中高斯体的候选对应关系,构成稳健几何优化的基础,粗略对齐从局部地图中提取的3D高斯基元。第三,这一关键步骤使得后续子地图间变换的光度细化成为可能,SIREN利用GSplat地图中的新视角合成以及基于语义的图像滤波器,计算高精度的非刚性变换,从而生成高保真融合地图。实验表明,在各种真实世界数据集上,SIREN的性能优于竞争基线,尤其是在最常用的机器人硬件平台(包括机械臂、无人机和四足机器人)上。在我们的实验中,在竞争方法难以处理的最具挑战性的场景中,SIREN实现了约90倍更小的旋转误差、300倍更小的平移误差和44倍更小的尺度误差。我们将在审查过程后发布代码并提供项目页面链接。
🔬 方法详解
问题定义:论文旨在解决多机器人系统中,多个机器人独立构建的高斯溅射(GSplat)地图之间的配准问题。现有方法通常依赖于相机位姿、图像或地图间变换等初始化信息,这在实际应用中可能难以获取或不准确,导致配准失败或精度下降。因此,如何在没有初始化信息的情况下,实现鲁棒且精确的多机器人GSplat地图配准是一个关键挑战。
核心思路:SIREN的核心思路是利用语义信息作为桥梁,建立不同局部地图之间的对应关系,从而实现无需初始化的配准。语义信息具有对视角、光照等变化的不变性,可以有效地识别局部地图中的关键特征区域,并建立鲁棒的对应关系。通过语义信息引导的几何优化和光度细化,可以逐步提高配准的精度。
技术框架:SIREN的整体流程包括以下几个主要阶段:1) 语义特征提取:从局部GSplat地图中提取语义信息,例如物体类别、语义分割等。2) 候选对应关系建立:基于语义特征,在不同局部地图之间建立高斯体的候选对应关系。3) 几何优化:利用候选对应关系,进行粗略的几何对齐,优化局部地图之间的变换关系。4) 光度细化:利用GSplat地图的新视角合成能力,以及基于语义的图像滤波器,对变换关系进行光度细化,得到最终的配准结果。
关键创新:SIREN的关键创新在于:1) 无需初始化:通过语义信息建立对应关系,避免了对初始化信息的依赖。2) 语义引导的配准:利用语义信息指导几何优化和光度细化,提高了配准的鲁棒性和准确性。3) 语义感知的图像滤波:在光度细化阶段,利用语义信息对图像进行滤波,减少了噪声和无关区域的干扰。
关键设计:SIREN的关键设计包括:1) 语义特征的选择:选择具有代表性和鲁棒性的语义特征,例如物体类别、语义分割等。2) 对应关系的建立策略:设计有效的对应关系建立策略,例如基于语义相似度的匹配、RANSAC等。3) 损失函数的设计:设计合适的损失函数,例如几何误差、光度误差等,用于优化变换关系。4) 语义滤波器的设计:设计语义滤波器,用于去除图像中的噪声和无关区域。
🖼️ 关键图片


📊 实验亮点
SIREN在真实世界数据集上取得了显著的性能提升。在最具挑战性的场景中,SIREN相比于现有方法,实现了约90倍更小的旋转误差、300倍更小的平移误差和44倍更小的尺度误差。这些结果表明,SIREN在鲁棒性和准确性方面都优于现有方法,尤其是在初始化信息缺失的情况下。
🎯 应用场景
SIREN在多机器人协同建图、环境探索、目标搜索等领域具有广泛的应用前景。例如,在灾难救援场景中,多个机器人可以独立探索环境并构建局部地图,然后通过SIREN进行地图配准和融合,从而快速构建全局地图,为救援工作提供支持。此外,SIREN还可以应用于自动驾驶、增强现实等领域。
📄 摘要(原文)
We present SIREN for registration of multi-robot Gaussian Splatting (GSplat) maps, with zero access to camera poses, images, and inter-map transforms for initialization or fusion of local submaps. To realize these capabilities, SIREN harnesses the versatility and robustness of semantics in three critical ways to derive a rigorous registration pipeline for multi-robot GSplat maps. First, SIREN utilizes semantics to identify feature-rich regions of the local maps where the registration problem is better posed, eliminating the need for any initialization which is generally required in prior work. Second, SIREN identifies candidate correspondences between Gaussians in the local maps using robust semantic features, constituting the foundation for robust geometric optimization, coarsely aligning 3D Gaussian primitives extracted from the local maps. Third, this key step enables subsequent photometric refinement of the transformation between the submaps, where SIREN leverages novel-view synthesis in GSplat maps along with a semantics-based image filter to compute a high-accuracy non-rigid transformation for the generation of a high-fidelity fused map. We demonstrate the superior performance of SIREN compared to competing baselines across a range of real-world datasets, and in particular, across the most widely-used robot hardware platforms, including a manipulator, drone, and quadruped. In our experiments, SIREN achieves about 90x smaller rotation errors, 300x smaller translation errors, and 44x smaller scale errors in the most challenging scenes, where competing methods struggle. We will release the code and provide a link to the project page after the review process.