DreamFLEX: Learning Fault-Aware Quadrupedal Locomotion Controller for Anomaly Situation in Rough Terrains
作者: Seunghyun Lee, I Made Aswin Nahrendra, Dongkyu Lee, Byeongho Yu, Minho Oh, Hyun Myung
分类: cs.RO, eess.SY
发布日期: 2025-02-09
备注: Accepted for ICRA 2025. Project site is available at https://dreamflex.github.io/
💡 一句话要点
DreamFLEX:学习容错的四足机器人运动控制器,应对复杂地形中的异常情况
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 容错控制 故障估计 运动规划 强化学习
📋 核心要点
- 四足机器人常因硬件问题(如电机过热、关节锁死)导致运动失败,尤其是在复杂地形中。
- DreamFLEX通过显式故障估计和调制网络,实时估计关节故障并调整运动模式,从而实现容错控制。
- 实验表明,DreamFLEX在仿真和真实环境中均优于现有方法,能有效应对硬件故障并保持运动性能。
📝 摘要(中文)
本文提出DreamFLEX,一种鲁棒的容错运动控制器,使四足机器人即使在关节失效的情况下也能穿越复杂环境。DreamFLEX集成了一个显式的故障估计和调制网络,该网络联合估计机器人的关节故障向量,并利用这些信息实时调整运动模式以适应故障情况,使四足机器人能够在粗糙地形中保持稳定性和性能。实验结果表明,DreamFLEX在仿真和真实场景中均优于现有方法,有效地管理硬件故障,同时保持鲁棒的运动性能。
🔬 方法详解
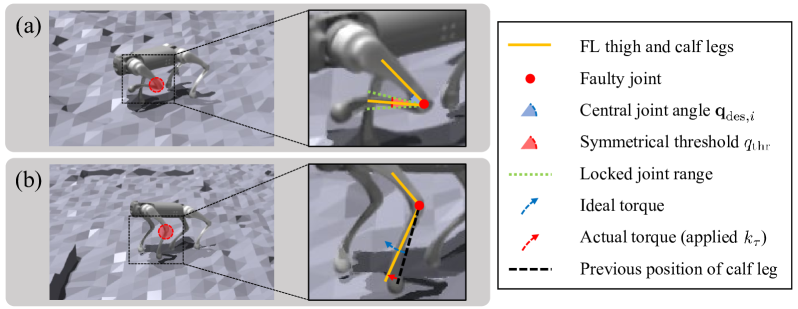
问题定义:现有的四足机器人容错控制方法在非结构化地形中仍面临挑战。当机器人在崎岖地形上长时间行走或运动时,容易出现电机过热或关节锁死等硬件故障,导致运动失败。因此,需要一种能够在复杂地形中有效应对关节故障的鲁棒容错控制方法。
核心思路:DreamFLEX的核心思路是显式地估计机器人的关节故障,并利用这些信息实时调整运动模式。通过学习一个故障估计和调制网络,机器人可以感知自身的故障状态,并自适应地改变步态和运动轨迹,从而在故障情况下保持稳定性和运动性能。
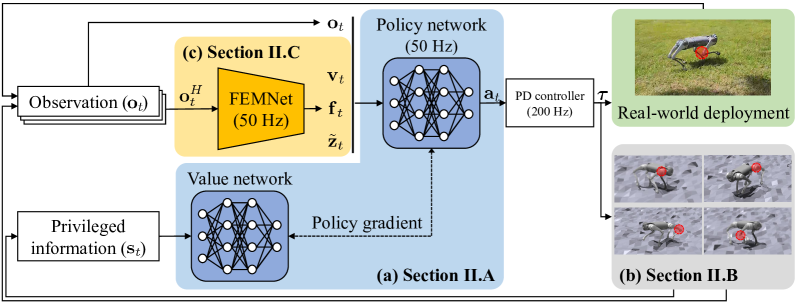
技术框架:DreamFLEX的整体框架包含以下几个主要模块:1) 故障估计网络:用于估计机器人的关节故障向量。2) 运动模式调制网络:根据估计的故障向量,调整机器人的运动模式,包括步态参数、关节轨迹等。3) 低层控制器:执行调制后的运动指令,控制机器人的关节运动。整个流程是,首先通过传感器数据估计故障,然后利用故障信息调整运动模式,最后通过低层控制器执行运动。
关键创新:DreamFLEX的关键创新在于显式地建模和估计关节故障,并将其融入到运动控制中。与传统的隐式容错方法相比,DreamFLEX能够更准确地感知故障状态,并进行更精细的运动调整。此外,DreamFLEX采用端到端学习的方式,能够自动优化故障估计和运动调制策略。
关键设计:故障估计网络和运动模式调制网络是DreamFLEX的关键组成部分。故障估计网络可能采用循环神经网络(RNN)或Transformer结构,以捕捉时间序列上的故障信息。运动模式调制网络可能采用多层感知机(MLP)或卷积神经网络(CNN),以学习故障向量到运动参数的映射关系。损失函数的设计需要考虑故障估计的准确性和运动性能的稳定性。具体的参数设置和网络结构未知,需要参考论文的详细描述。
🖼️ 关键图片

📊 实验亮点
DreamFLEX在仿真和真实环境中进行了实验验证。结果表明,DreamFLEX在关节失效的情况下,能够有效地保持机器人的稳定性和运动性能,优于现有的容错控制方法。具体的性能提升数据未知,需要参考论文的实验部分。
🎯 应用场景
DreamFLEX技术可应用于搜救、勘探、巡检等多种场景,尤其是在复杂、危险的环境中。例如,在地震灾区,搭载DreamFLEX的四足机器人可以进入废墟搜寻幸存者;在矿井中,可以进行安全巡检;在太空探索中,可以进行地形勘测。该技术能够提高机器人的可靠性和适应性,扩展其应用范围。
📄 摘要(原文)
Recent advances in quadrupedal robots have demonstrated impressive agility and the ability to traverse diverse terrains. However, hardware issues, such as motor overheating or joint locking, may occur during long-distance walking or traversing through rough terrains leading to locomotion failures. Although several studies have proposed fault-tolerant control methods for quadrupedal robots, there are still challenges in traversing unstructured terrains. In this paper, we propose DreamFLEX, a robust fault-tolerant locomotion controller that enables a quadrupedal robot to traverse complex environments even under joint failure conditions. DreamFLEX integrates an explicit failure estimation and modulation network that jointly estimates the robot's joint fault vector and utilizes this information to adapt the locomotion pattern to faulty conditions in real-time, enabling quadrupedal robots to maintain stability and performance in rough terrains. Experimental results demonstrate that DreamFLEX outperforms existing methods in both simulation and real-world scenarios, effectively managing hardware failures while maintaining robust locomotion performance.