Implicit Physics-aware Policy for Dynamic Manipulation of Rigid Objects via Soft Body Tools
作者: Zixing Wang, Ahmed H. Qureshi
分类: cs.RO
发布日期: 2025-02-08
备注: ICRA 2025
💡 一句话要点
提出基于隐式物理感知的策略,用于软体工具动态操作刚性物体
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体工具 刚性物体操作 动态操作 隐式物理感知 机器人控制
📋 核心要点
- 现有机器人工具使用主要集中在刚性工具上,对软体工具及其与刚性物体的动态交互研究不足。
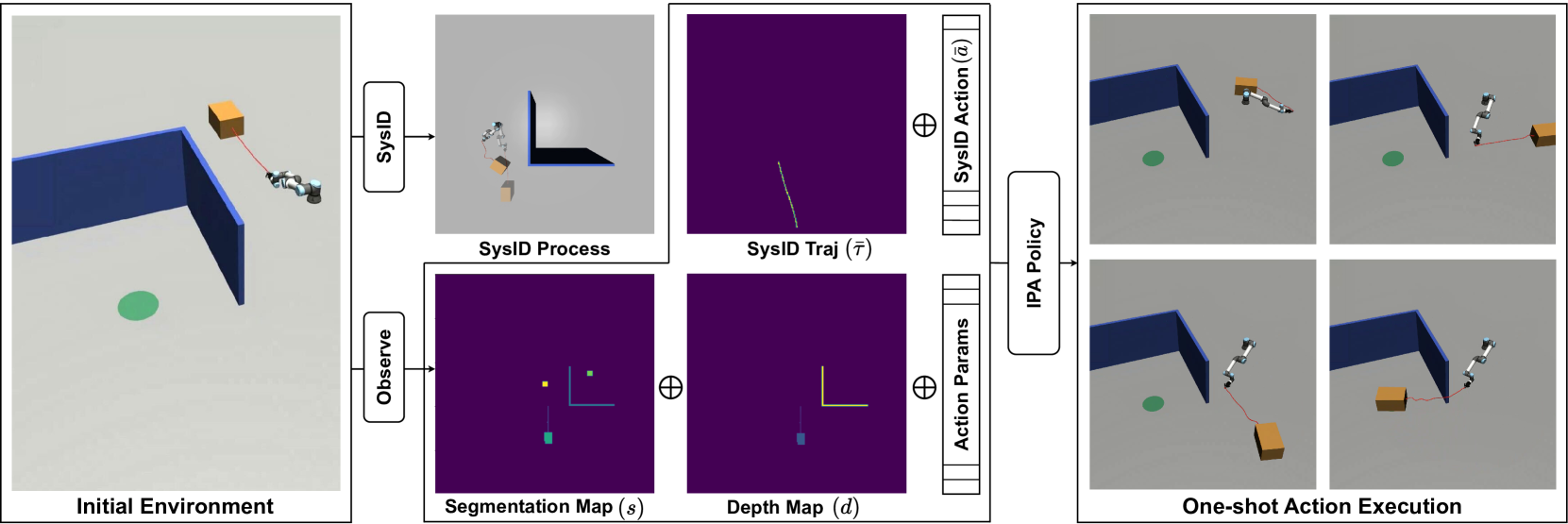
- 论文提出隐式物理感知(IPA)策略,通过系统辨识隐式地识别物理信息,预测目标条件下的单次动作。
- 实验表明,该方法能有效识别物理属性,准确预测动作,并能平滑泛化到真实环境,完成软体工具操作刚性物体的任务。
📝 摘要(中文)
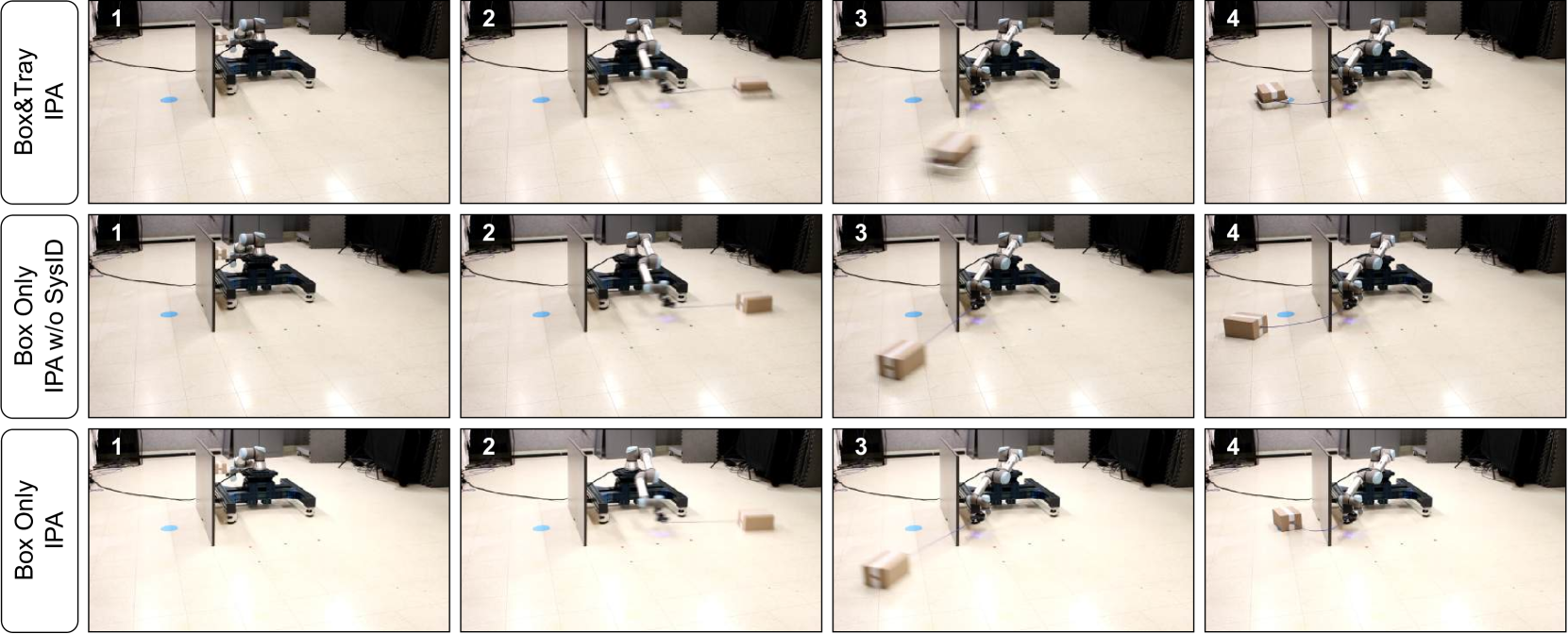
本文率先探索了使用软体工具动态操作刚性物体这一领域,针对复杂交互和不可观测物理属性带来的挑战,提出了一种隐式物理感知(IPA)策略,旨在促进各种环境配置下软体工具的有效使用。IPA策略通过系统辨识隐式地识别物理信息,并相应地预测目标条件下的单次动作。论文通过一项具有挑战性的任务,即在未知的环境物理参数下,使用绳索等软体工具一次性将刚性物体运输到远处的目标位置,验证了该方法的有效性。实验结果表明,该方法能够有效地识别物理属性,准确地预测动作,并能平滑地泛化到真实世界环境中。
🔬 方法详解
问题定义:论文旨在解决使用软体工具(如绳索)动态操作刚性物体的问题,特别是在环境物理参数未知的情况下,如何一次性将物体移动到目标位置。现有方法主要集中于刚性工具,无法有效处理软体工具与刚性物体之间复杂的动态交互,以及软体工具形变带来的不确定性。
核心思路:论文的核心思路是通过系统辨识来隐式地学习环境的物理属性,并基于学习到的物理属性预测最优的单次动作。这种方法避免了显式地建模复杂的物理交互过程,而是通过数据驱动的方式学习一个策略,该策略能够根据当前状态和目标位置,直接输出控制软体工具的动作。
技术框架:IPA策略主要包含两个阶段:系统辨识阶段和动作预测阶段。在系统辨识阶段,通过与环境的交互收集数据,然后利用这些数据学习一个隐式的物理模型。在动作预测阶段,利用学习到的物理模型,根据当前状态和目标位置,预测最优的单次动作。整个框架采用端到端的方式进行训练,无需人工设计复杂的特征或规则。
关键创新:论文的关键创新在于提出了一种隐式的物理感知方法,该方法能够从与环境的交互中学习物理属性,而无需显式地建模物理过程。这种方法能够有效地处理软体工具与刚性物体之间复杂的动态交互,并且能够适应未知的环境物理参数。与现有方法相比,该方法更加鲁棒和通用。
关键设计:IPA策略使用深度神经网络来实现系统辨识和动作预测。系统辨识模块采用循环神经网络(RNN)来处理时序数据,学习环境的动态特性。动作预测模块采用前馈神经网络,根据当前状态和目标位置,预测最优的动作。损失函数包括动作预测的误差和系统辨识的误差,通过联合优化这两个误差,可以提高策略的性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,提出的IPA策略能够有效地识别物理属性,准确地预测动作,并能平滑地泛化到真实世界环境中。在刚性物体运输任务中,IPA策略能够成功地将物体移动到目标位置,并且具有较高的成功率。与传统的基于模型的控制方法相比,IPA策略具有更好的鲁棒性和适应性。
🎯 应用场景
该研究成果可应用于柔性制造、医疗康复、物流分拣等领域。例如,在柔性制造中,机器人可以使用绳索等软体工具来搬运和组装零件;在医疗康复中,可以使用软体机器人辅助病人进行康复训练;在物流分拣中,可以使用软体夹爪来抓取和搬运不同形状和大小的物体。该研究为机器人工具的使用开辟了新的方向,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Recent advancements in robot tool use have unlocked their usage for novel tasks, yet the predominant focus is on rigid-body tools, while the investigation of soft-body tools and their dynamic interaction with rigid bodies remains unexplored. This paper takes a pioneering step towards dynamic one-shot soft tool use for manipulating rigid objects, a challenging problem posed by complex interactions and unobservable physical properties. To address these problems, we propose the Implicit Physics-aware (IPA) policy, designed to facilitate effective soft tool use across various environmental configurations. The IPA policy conducts system identification to implicitly identify physics information and predict goal-conditioned, one-shot actions accordingly. We validate our approach through a challenging task, i.e., transporting rigid objects using soft tools such as ropes to distant target positions in a single attempt under unknown environment physics parameters. Our experimental results indicate the effectiveness of our method in efficiently identifying physical properties, accurately predicting actions, and smoothly generalizing to real-world environments. The related video is available at: https://youtu.be/4hPrUDTc4Rg?si=WUZrT2vjLMt8qRWA