Cooperative Payload Estimation by a Team of Mocobots
作者: Haoxuan Zhang, C. Lin Liu, Matthew L. Elwin, Randy A. Freeman, Kevin M. Lynch
分类: cs.RO
发布日期: 2025-02-07 (更新: 2025-08-01)
备注: 8 pages, 6 figures. Submitted to IEEE Robotics and Automation Letters (RA-L)
💡 一句话要点
提出一种多移动机器人协同有效载荷估计方法,用于自主操作和人机协作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人协同 有效载荷估计 自主操作 移动机器人 动力学建模
📋 核心要点
- 移动机器人团队协同操作有效载荷时,需要准确估计有效载荷的质量、惯性等参数,现有方法难以实现自主发现。
- 该方法利用机器人抓取框架处的 twist、twist 导数和 wrench 数据,估计抓取框架间的变换、质心位置和惯性矩阵。
- 实验结果验证了该方法在三个移动协作机器人团队中的有效性,为自主操作和人机协作奠定基础。
📝 摘要(中文)
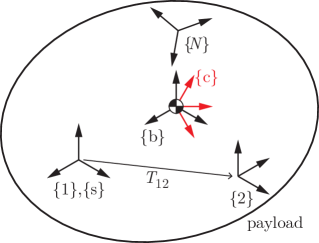
本文提出了一种方法,使机器人能够自主发现有效载荷的信息,包括其他机器人与有效载荷的连接位置、有效载荷的质量和惯性属性。该方法适用于移动机械臂团队对有效载荷进行高性能自主操作,或与人类进行协作操作。机器人协同操作有效载荷,并利用其抓取框架处的 twist、twist 导数和 wrench 数据来估计抓取框架之间的变换矩阵、有效载荷质心的位置以及有效载荷的惯性矩阵。通过三个移动协作机器人(mocobots)组成的团队进行了实验验证。
🔬 方法详解
问题定义:在多移动机器人协同操作有效载荷的场景中,需要准确估计有效载荷的质量、惯性属性以及各机器人抓取点的位置关系。现有方法通常依赖于预先已知的有效载荷信息或复杂的外部传感器,难以实现自主、鲁棒的估计。因此,如何仅利用机器人自身的感知数据,实现对有效载荷信息的自主估计,是一个重要的挑战。
核心思路:该论文的核心思路是利用机器人协同操作有效载荷时产生的运动学和动力学数据,反推出有效载荷的质量、惯性属性以及各机器人抓取点的位置关系。通过分析机器人抓取框架处的 twist、twist 导数和 wrench 数据,建立起机器人运动与有效载荷参数之间的数学模型,进而利用优化算法求解这些参数。
技术框架:该方法的整体框架包括以下几个主要步骤:1) 机器人团队协同操作有效载荷,并记录各机器人抓取框架处的 twist、twist 导数和 wrench 数据;2) 基于这些数据,建立包含抓取框架间变换矩阵、有效载荷质心位置和惯性矩阵的动力学模型;3) 利用优化算法,求解该动力学模型中的未知参数,从而估计出有效载荷的质量、惯性属性以及各机器人抓取点的位置关系。
关键创新:该方法最重要的创新点在于实现了有效载荷信息的自主估计,无需预先已知有效载荷的任何信息,也无需额外的外部传感器。该方法仅利用机器人自身的感知数据,通过协同操作和数据分析,即可实现对有效载荷信息的准确估计。与现有方法相比,该方法具有更高的自主性和鲁棒性。
关键设计:该方法的关键设计包括:1) 精确的动力学模型,能够准确描述机器人运动与有效载荷参数之间的关系;2) 鲁棒的优化算法,能够有效地求解动力学模型中的未知参数;3) 合理的机器人运动轨迹设计,能够最大程度地激发有效载荷的运动,从而提高参数估计的精度。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够有效地估计有效载荷的质量、惯性属性以及各机器人抓取点的位置关系。通过三个移动协作机器人组成的团队进行实验验证,证明了该方法在实际应用中的可行性和有效性。具体的性能数据(例如估计精度、收敛速度等)未在摘要中给出,属于未知信息。
🎯 应用场景
该研究成果可广泛应用于多机器人协同搬运、装配等任务中,尤其是在未知环境或有效载荷信息不明确的场景下。例如,在仓库物流中,多个移动机器人可以协同搬运大型货物,并自主估计货物的质量和重心,从而实现安全高效的搬运。此外,该方法还可应用于人机协作场景,机器人可以辅助人类搬运重物,并根据人类的动作调整自身的力,实现更加自然和谐的人机交互。
📄 摘要(原文)
For high-performance autonomous manipulation of a payload by a mobile manipulator team, or for collaborative manipulation with the human, robots should be able to discover where other robots are attached to the payload, as well as the payload's mass and inertial properties. In this paper, we describe a method for the robots to autonomously discover this information. The robots cooperatively manipulate the payload, and the twist, twist derivative, and wrench data at their grasp frames are used to estimate the transformation matrices between the grasp frames, the location of the payload's center of mass, and the payload's inertia matrix. The method is validated experimentally with a team of three mobile cobots, or mocobots.