Rethinking Latent Redundancy in Behavior Cloning: An Information Bottleneck Approach for Robot Manipulation
作者: Shuanghao Bai, Wanqi Zhou, Pengxiang Ding, Wei Zhao, Donglin Wang, Badong Chen
分类: cs.RO, cs.LG
发布日期: 2025-02-05 (更新: 2025-05-13)
备注: Accepted by ICML 2025
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于信息瓶颈的行为克隆方法,提升机器人操作泛化性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 行为克隆 信息瓶颈 机器人操作 模仿学习 泛化能力 冗余信息 互信息
📋 核心要点
- 现有行为克隆方法依赖大数据和多模态信息,但忽略了潜在表示中的冗余信息,缺乏理论指导。
- 论文将信息瓶颈(IB)原则引入行为克隆(BC),旨在压缩不相关信息,保留任务相关特征,减少冗余。
- 在CortexBench和LIBERO基准测试中,实验结果表明该方法显著提高了性能,验证了减少冗余的重要性。
📝 摘要(中文)
行为克隆(BC)是机器人操作中一种广泛采用的视觉模仿学习方法。现有的BC方法通常通过利用大型数据集和结合额外的视觉和文本模态来捕获更多样化的信息,从而增强泛化能力。然而,这些方法忽略了学习到的表示是否包含冗余信息,并且缺乏坚实的理论基础来指导学习过程。为了解决这些限制,我们采用信息论的视角,引入互信息来量化和减少潜在表示中的冗余。在此基础上,我们将信息瓶颈(IB)原则融入BC,通过提供一个结构化的框架来压缩不相关的信息,同时保留任务相关的特征,从而扩展了减少冗余的想法。这项工作首次对各种方法、骨干网络和实验设置中潜在表示的冗余进行了全面的研究,同时扩展了IB对BC的泛化性。在CortexBench和LIBERO基准上的大量实验和分析表明,使用IB可以显著提高性能,突出了减少输入数据冗余的重要性,并强调了其在更实际应用中的实际价值。
🔬 方法详解
问题定义:现有行为克隆方法在机器人操作任务中,虽然通过增加数据量和模态种类来提升泛化性,但忽略了学习到的潜在表示中可能存在的冗余信息。这些冗余信息不仅增加了计算负担,也可能干扰策略学习,导致泛化性能下降。此外,现有方法缺乏理论指导,难以有效控制信息的压缩和保留。
核心思路:论文的核心思路是将信息瓶颈(Information Bottleneck, IB)原则引入到行为克隆(Behavior Cloning, BC)框架中。IB原则旨在找到一个压缩表示,该表示既能最大程度地保留与任务相关的信息,又能最小化与任务无关的信息。通过在BC中应用IB,可以学习到更简洁、更具泛化能力的策略。
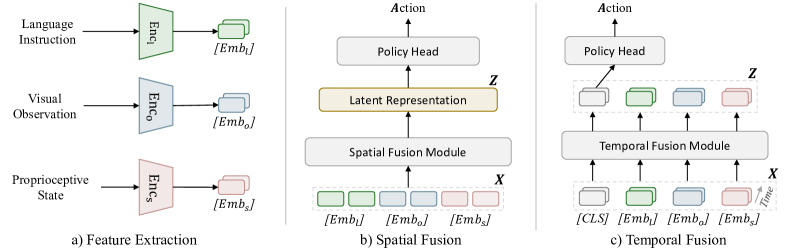
技术框架:该方法的核心框架是在标准的行为克隆训练流程中,引入一个信息瓶颈层。具体来说,输入数据首先通过一个编码器网络,将原始观测转换为潜在表示。然后,信息瓶颈层对该潜在表示进行压缩,去除冗余信息。最后,解码器网络(通常是一个策略网络)基于压缩后的表示生成动作。整个训练过程通过优化一个包含行为克隆损失和信息瓶颈损失的联合目标函数来完成。
关键创新:该论文的关键创新在于首次将信息瓶颈原则应用于行为克隆任务,并系统性地研究了潜在表示中的冗余问题。与传统的行为克隆方法相比,该方法能够学习到更简洁、更具泛化能力的策略。此外,该论文还对不同方法、骨干网络和实验设置下的冗余情况进行了全面的分析。
关键设计:信息瓶颈损失通常采用互信息(Mutual Information)的变分下界来近似。具体来说,可以使用一个辅助网络来估计潜在表示和任务相关变量之间的互信息。在训练过程中,通过最小化该互信息的上界,可以实现对潜在表示的压缩。此外,编码器和解码器的网络结构选择也会影响最终的性能。论文中可能探讨了不同的网络结构和超参数设置,以找到最佳的配置。
🖼️ 关键图片

📊 实验亮点
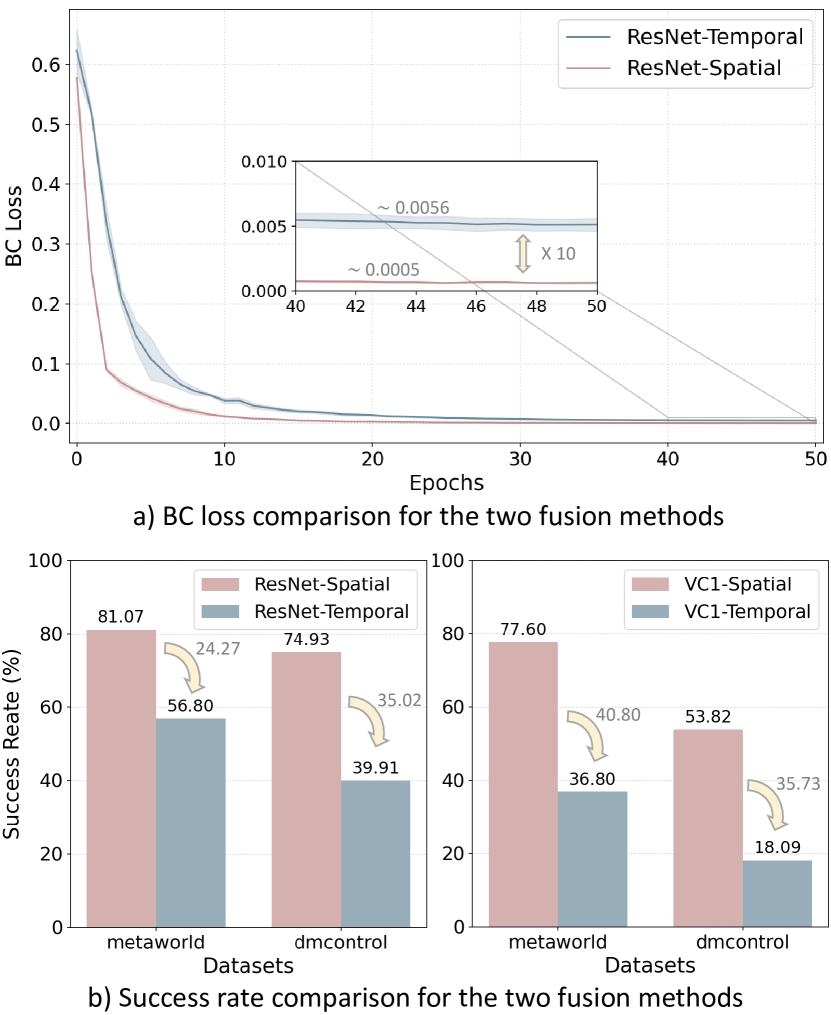
论文在CortexBench和LIBERO基准测试中进行了大量实验,结果表明,与传统的行为克隆方法相比,使用信息瓶颈(IB)可以显著提高性能。具体的性能提升幅度未知,但摘要强调了“significant performance improvements”,表明IB在减少输入数据冗余方面具有重要作用,并提升了BC的泛化能力。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如物体抓取、装配、导航等。通过减少冗余信息,可以提高机器人在复杂环境中的泛化能力和鲁棒性。此外,该方法还可以用于迁移学习和终身学习,帮助机器人更快地适应新的任务和环境。该研究对于推动机器人技术的实际应用具有重要意义。
📄 摘要(原文)
Behavior Cloning (BC) is a widely adopted visual imitation learning method in robot manipulation. Current BC approaches often enhance generalization by leveraging large datasets and incorporating additional visual and textual modalities to capture more diverse information. However, these methods overlook whether the learned representations contain redundant information and lack a solid theoretical foundation to guide the learning process. To address these limitations, we adopt an information-theoretic perspective and introduce mutual information to quantify and mitigate redundancy in latent representations. Building on this, we incorporate the Information Bottleneck (IB) principle into BC, which extends the idea of reducing redundancy by providing a structured framework for compressing irrelevant information while preserving task-relevant features. This work presents the first comprehensive study on redundancy in latent representations across various methods, backbones, and experimental settings, while extending the generalizability of the IB to BC. Extensive experiments and analyses on the CortexBench and LIBERO benchmarks demonstrate significant performance improvements with IB, underscoring the importance of reducing input data redundancy and highlighting its practical value for more practical applications. Project Page: https://baishuanghao.github.io/BC-IB.github.io.