Generalizable and Fast Surrogates: Model Predictive Control of Articulated Soft Robots using Physics-Informed Neural Networks
作者: Tim-Lukas Habich, Aran Mohammad, Simon F. G. Ehlers, Martin Bensch, Thomas Seel, Moritz Schappler
分类: cs.RO, cs.LG
发布日期: 2025-02-04 (更新: 2025-11-18)
备注: Accepted for publication in IEEE Transactions on Robotics (T-RO) 2025
💡 一句话要点
提出基于物理信息神经网络的快速通用软体机器人模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 物理信息神经网络 模型预测控制 数据效率 通用性
📋 核心要点
- 软体机器人控制面临挑战,传统方法如第一性原理模型速度慢,黑盒模型泛化性差。
- 提出基于物理信息神经网络(PINN)的替代方案,利用物理知识提高数据效率和泛化能力。
- 实验表明,PINN在保证一定精度下,预测速度远超第一性原理模型,并成功应用于软体机器人模型预测控制。
📝 摘要(中文)
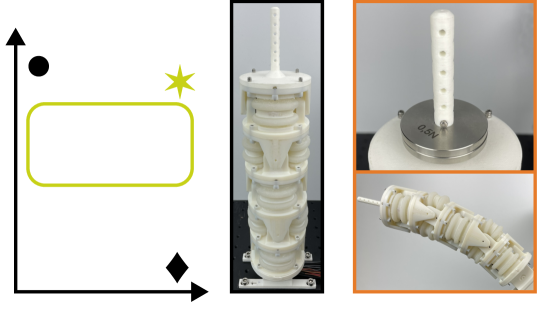
软体机器人因其灵活性和安全性,在许多高要求的应用中具有变革潜力。然而,实时估计和控制需要快速且精确的模型。传统的第一性原理模型预测速度慢,而黑盒模型泛化性差。物理信息机器学习在此展现出优势,但目前局限于简单的仿真系统,且训练后无法适应变化。本文提出一种用于铰接式软体机器人(ASR)的物理信息神经网络(PINN),重点关注数据效率。仅需少量真实世界训练数据——一个系统域中的一个数据集。使用不同域中的两小时数据与两种黄金标准方法进行比较:PINN提供了比循环神经网络更高的泛化性,并且在略微降低精度的情况下,PINN的预测速度比精确的第一性原理模型快高达467倍。这使得气动ASR的非线性模型预测控制(MPC)成为可能。在六个动态实验中,实现了MPC以47 Hz运行的精确位置跟踪。
🔬 方法详解
问题定义:软体机器人的实时控制需要快速且精确的模型。传统的第一性原理模型计算复杂度高,难以满足实时性要求;而纯数据驱动的黑盒模型,如循环神经网络,虽然速度快,但在面对新的环境或任务时,泛化能力较差,需要大量的训练数据。因此,如何在保证模型预测精度的前提下,提高预测速度和泛化能力,是软体机器人控制的关键问题。
核心思路:本文的核心思路是将物理信息融入到神经网络中,利用物理定律作为约束,减少对大量训练数据的依赖,提高模型的泛化能力。具体而言,通过在神经网络的损失函数中加入物理约束项,使得网络在学习数据的同时,也学习了物理规律,从而提高了模型的预测精度和泛化能力。同时,神经网络的并行计算能力使得模型预测速度远快于传统的第一性原理模型。
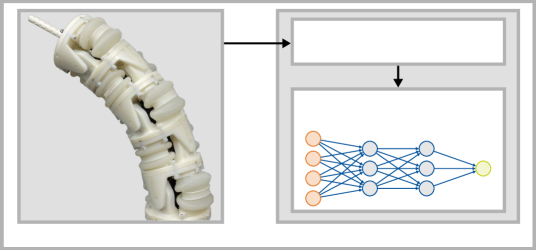
技术框架:该方法主要包含以下几个阶段:1) 构建铰接式软体机器人的动力学模型,推导出其运动方程;2) 设计物理信息神经网络(PINN),其输入为机器人的状态和控制输入,输出为机器人的状态变化;3) 定义损失函数,包括数据损失项和物理损失项,数据损失项用于约束网络对训练数据的拟合程度,物理损失项用于约束网络满足动力学方程;4) 使用优化算法训练PINN,使其能够准确预测机器人的运动状态;5) 将训练好的PINN作为软体机器人模型预测控制(MPC)的代理模型,实现实时控制。
关键创新:该方法最重要的技术创新点在于将物理信息融入到神经网络中,从而提高了模型的泛化能力和数据效率。与传统的黑盒模型相比,PINN不需要大量的训练数据,就可以实现较高的预测精度。与传统的第一性原理模型相比,PINN的预测速度更快,可以满足实时控制的需求。此外,该方法还提出了一种新的损失函数,可以有效地约束网络满足动力学方程。
关键设计:在网络结构方面,作者使用了多层感知机(MLP)作为PINN的基本结构。损失函数由两部分组成:数据损失和物理损失。数据损失采用均方误差(MSE)来衡量网络预测结果与真实数据之间的差异。物理损失则基于软体机器人的动力学方程,通过计算方程的残差来衡量网络对物理定律的满足程度。优化算法采用Adam优化器,学习率根据经验进行调整。此外,作者还对训练数据进行了归一化处理,以提高训练的稳定性和收敛速度。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的PINN方法在预测精度上与第一性原理模型相当,但预测速度提高了高达467倍。与循环神经网络相比,PINN具有更好的泛化能力,仅使用少量真实数据即可实现良好的控制效果。通过将PINN作为模型预测控制器的代理模型,实现了47Hz的实时位置跟踪控制,验证了该方法在实际应用中的可行性和有效性。
🎯 应用场景
该研究成果可广泛应用于需要高灵活性和安全性的软体机器人领域,例如医疗康复、精密操作、灾难救援和人机交互等。快速且通用的模型预测控制能够提升软体机器人在复杂环境中的适应性和自主性,实现更安全、高效的任务执行。未来,该方法有望推广到其他类型的软体机器人和复杂系统,推动软体机器人技术的进一步发展。
📄 摘要(原文)
Soft robots can revolutionize several applications with high demands on dexterity and safety. When operating these systems, real-time estimation and control require fast and accurate models. However, prediction with first-principles (FP) models is slow, and learned black-box models have poor generalizability. Physics-informed machine learning offers excellent advantages here, but it is currently limited to simple, often simulated systems without considering changes after training. We propose physics-informed neural networks (PINNs) for articulated soft robots (ASRs) with a focus on data efficiency. The amount of expensive real-world training data is reduced to a minimum -- one dataset in one system domain. Two hours of data in different domains are used for a comparison against two gold-standard approaches: In contrast to a recurrent neural network, the PINN provides a high generalizability. The prediction speed of an accurate FP model is exceeded with the PINN by up to a factor of 467 at slightly reduced accuracy. This enables nonlinear model predictive control (MPC) of a pneumatic ASR. Accurate position tracking with the MPC running at 47 Hz is achieved in six dynamic experiments.