IG-MCTS: Human-in-the-Loop Cooperative Navigation under Incomplete Information
作者: Shenghui Chen, Ruihan Zhao, Sandeep Chinchali, Ufuk Topcu
分类: cs.RO, cs.AI
发布日期: 2025-02-03 (更新: 2025-10-09)
💡 一句话要点
提出IG-MCTS算法,解决不完全信息下人机协同导航问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机协同 导航 蒙特卡洛树搜索 信息增益 人类感知模型 不完全信息 在线规划
📋 核心要点
- 现有方法在不完全信息下人机协同导航中,难以兼顾任务完成效率和人类认知负荷。
- 提出IG-MCTS算法,通过联合优化机器人自主移动和信息通信,提升协同效率。
- 实验表明,IG-MCTS能显著降低通信需求和人类认知负荷,同时保持任务性能。
📝 摘要(中文)
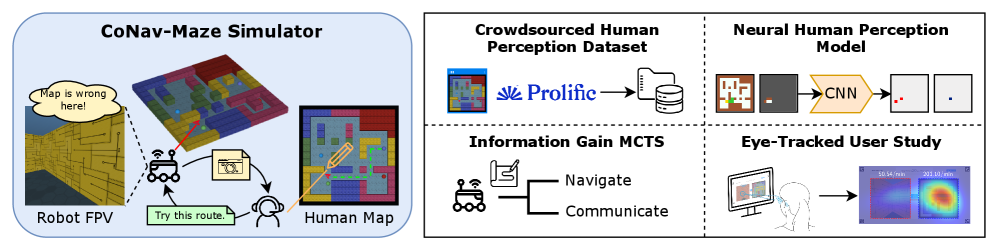
本文研究不完全信息下的人机协同导航问题。作者构建了一个名为CoNav-Maze的模拟环境,其中机器人依靠局部感知进行导航,而人类操作员则根据不精确的地图提供指导。机器人可以分享其车载摄像头视图,以帮助操作员改进对环境的理解。为了实现高效的协同,作者提出了一种名为信息增益蒙特卡洛树搜索(IG-MCTS)的在线规划算法,该算法联合优化自主移动和信息通信。IG-MCTS利用学习到的神经人类感知模型(NHPM),该模型在众包地图数据集上进行训练,以预测人类的内部地图如何随着新观察的共享而演变。用户研究表明,IG-MCTS显著降低了通信需求,并产生了表明认知负荷较低的眼动追踪指标,同时保持了与远程操作和指令跟随基线相当的任务性能。最后,作者通过连续空间水道导航设置说明了离散迷宫之外的泛化能力,其中NHPM受益于更深层的编码器-解码器架构,而IG-MCTS利用动态构建的Voronoi分割可通行性图。
🔬 方法详解
问题定义:论文旨在解决不完全信息下人机协同导航问题。现有方法通常依赖于频繁的人工干预或预定义的通信策略,导致效率低下或人类操作员认知负荷过重。痛点在于如何在有限的通信资源下,最大化人类对环境的理解,从而实现高效的协同导航。
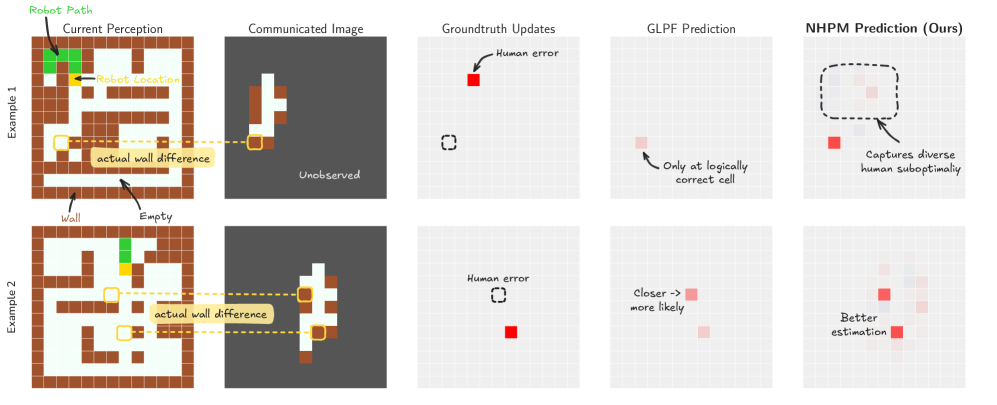
核心思路:核心思路是让机器人主动选择能够最大程度提升人类对环境理解的行动和通信策略。通过预测人类在接收到机器人共享信息后内部地图的变化,机器人可以更有针对性地进行探索和沟通,从而减少不必要的通信,降低人类认知负荷。
技术框架:整体框架包含三个主要部分:机器人环境交互、人类感知模型(NHPM)和信息增益蒙特卡洛树搜索(IG-MCTS)规划器。机器人通过传感器获取环境信息,并将其传递给NHPM。NHPM预测人类在接收到信息后对环境的理解。IG-MCTS则利用NHPM的预测结果,规划机器人的下一步行动和通信策略,目标是最大化信息增益并完成导航任务。
关键创新:关键创新在于将人类感知模型(NHPM)融入到蒙特卡洛树搜索(MCTS)规划中,从而使机器人能够预测人类的认知状态,并根据预测结果优化行动和通信策略。与传统的MCTS方法相比,IG-MCTS不仅考虑了任务完成的奖励,还考虑了信息增益的奖励,从而实现了更高效的人机协同。
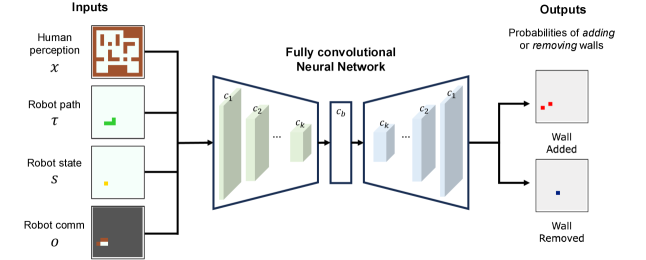
关键设计:NHPM是一个神经网络,其输入是机器人的观测和人类的初始地图,输出是人类更新后的地图。NHPM通过在众包数据集上进行训练,学习人类如何根据新的观测更新其内部地图。IG-MCTS使用NHPM来评估不同行动和通信策略的信息增益,并选择能够最大化累积奖励的策略。在连续空间中,论文采用Voronoi图来构建可通行性图,并使用更深层的编码器-解码器架构来提升NHPM的性能。
🖼️ 关键图片
📊 实验亮点
用户研究表明,IG-MCTS显著降低了通信需求,并产生了表明认知负荷较低的眼动追踪指标,同时保持了与远程操作和指令跟随基线相当的任务性能。在CoNav-Maze环境中,IG-MCTS在通信次数上优于其他基线方法,并且在连续空间水道导航任务中也表现出良好的泛化能力。
🎯 应用场景
该研究成果可应用于多种人机协同导航场景,例如:搜救行动中,无人机与地面搜救人员协同搜索;工业巡检中,机器人与工程师协同检查设备;以及智能家居中,机器人帮助老年人或残疾人进行导航。通过降低通信需求和认知负荷,该方法可以提高人机协同效率,并提升用户体验。
📄 摘要(原文)
Human-robot cooperative navigation is challenging under incomplete information. We introduce CoNav-Maze, a simulated environment where a robot navigates with local perception while a human operator provides guidance based on an inaccurate map. The robot can share its onboard camera views to help the operator refine their understanding of the environment. To enable efficient cooperation, we propose Information Gain Monte Carlo Tree Search (IG-MCTS), an online planning algorithm that jointly optimizes autonomous movement and informative communication. IG-MCTS leverages a learned Neural Human Perception Model (NHPM) -- trained on a crowdsourced mapping dataset -- to predict how the human's internal map evolves as new observations are shared. User studies show that IG-MCTS significantly reduces communication demands and yields eye-tracking metrics indicative of lower cognitive load, while maintaining task performance comparable to teleoperation and instruction-following baselines. Finally, we illustrate generalization beyond discrete mazes through a continuous-space waterway navigation setting, in which NHPM benefits from deeper encoder-decoder architectures and IG-MCTS leverages a dynamically constructed Voronoi-partitioned traversability graph.