ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation
作者: Haochen Shi, Weizhuo Wang, Shuran Song, C. Karen Liu
分类: cs.RO
发布日期: 2025-02-02 (更新: 2025-10-06)
备注: Project website: https://toddlerbot.github.io/
💡 一句话要点
ToddlerBot:用于Loco-Manipulation的开源、ML兼容的人形机器人平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人 机器人学习 Loco-Manipulation 开源硬件 仿真迁移
📋 核心要点
- 现有基于数据的机器人学习研究缺乏兼顾策略执行和数据收集的机器人硬件设计。
- ToddlerBot通过低成本、开源的人形机器人平台,实现仿真和真实世界数据的高效采集与策略迁移。
- 实验验证了ToddlerBot在臂展、负载、耐久性、Loco-Manipulation和协同任务中的能力。
📝 摘要(中文)
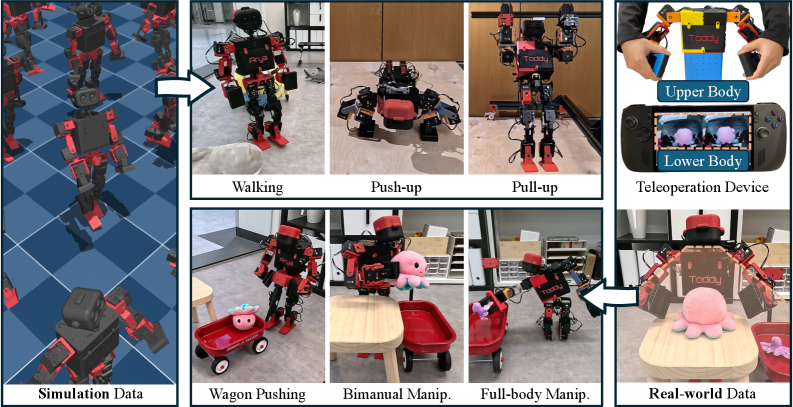
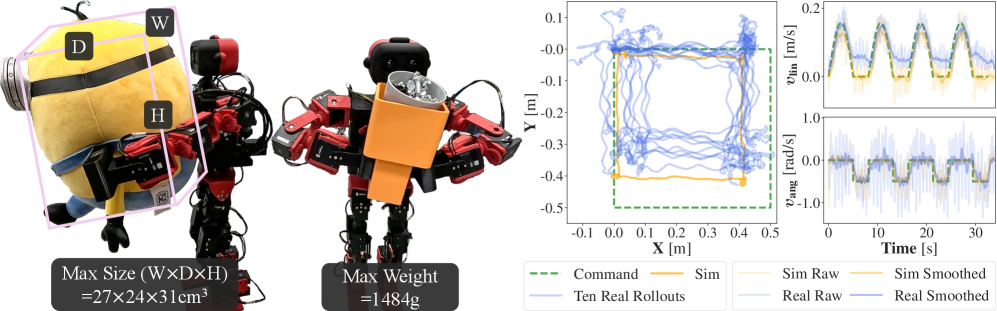
本文介绍了一种低成本、开源的人形机器人平台ToddlerBot,专为可扩展的策略学习以及机器人和人工智能研究而设计。ToddlerBot能够无缝获取高质量的仿真和真实世界数据。即插即用的零点校准和可转移的电机系统辨识确保了高保真数字孪生,从而实现从仿真到真实世界的零样本策略迁移。用户友好的遥操作界面简化了真实世界数据的收集,便于从人类演示中学习运动技能。凭借其数据收集能力和拟人化设计,ToddlerBot是执行全身Loco-Manipulation的理想平台。此外,ToddlerBot的紧凑尺寸(0.56米,3.4千克)确保了在真实世界环境中的安全操作。完全3D打印、开源设计和市售组件实现了可重复性,总成本低于6,000美元。全面的文档使得具备基本技术知识的人员即可完成组装和维护,这已通过系统的成功独立复制得到验证。我们通过臂展、有效载荷、耐久性测试、Loco-Manipulation任务以及两个机器人协同整理玩具的长时程场景展示了ToddlerBot的能力。通过提高ML兼容性、能力和可重复性,ToddlerBot为机器人研究中的可扩展学习和动态策略执行提供了一个强大的平台。
🔬 方法详解
问题定义:现有基于学习的机器人研究严重依赖数据,但缺乏一种既能作为策略执行平台,又能作为收集训练策略所需数据的工具的机器人硬件设计。现有的机器人平台往往成本高昂、难以复现,且仿真与真实环境的迁移存在较大差距。
核心思路:ToddlerBot的核心思路是设计一个低成本、开源、易于组装和维护的人形机器人平台,该平台能够无缝地在仿真和真实世界之间迁移策略。通过高保真数字孪生和用户友好的遥操作界面,实现高效的数据收集和策略学习。
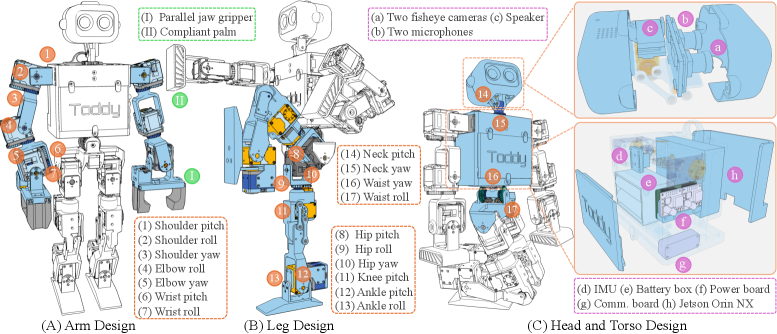
技术框架:ToddlerBot的整体框架包括以下几个主要模块:1) 机器人硬件设计:采用3D打印和市售组件,降低成本并提高可重复性。2) 仿真环境搭建:通过零点校准和电机系统辨识,构建高保真数字孪生。3) 遥操作界面:简化真实世界数据的收集过程。4) 策略学习:利用收集到的数据,训练机器人的运动技能。5) 策略迁移:将仿真环境中训练的策略零样本迁移到真实机器人上。
关键创新:ToddlerBot的关键创新在于其ML兼容性、可重复性和低成本。它提供了一个完整的开源平台,包括硬件设计、软件接口和文档,使得研究人员可以轻松地构建、维护和使用该机器人进行研究。此外,高保真数字孪生和零样本策略迁移能力大大提高了研究效率。
关键设计:ToddlerBot的关键设计包括:1) 采用3D打印技术,降低制造成本。2) 使用市售的电机和传感器,方便采购和更换。3) 设计了即插即用的零点校准系统,简化了校准过程。4) 开发了用户友好的遥操作界面,方便数据收集。5) 机器人尺寸和重量经过优化,确保在真实环境中的安全操作。
🖼️ 关键图片
📊 实验亮点
ToddlerBot通过臂展、有效载荷和耐久性测试验证了其基本性能。在Loco-Manipulation任务中,展示了其全身运动能力。在协同长时程任务中,两个ToddlerBot成功地完成了玩具整理任务,证明了其在复杂环境中的协作能力。该系统已成功被独立复制,验证了其可重复性。
🎯 应用场景
ToddlerBot的应用场景广泛,包括但不限于:机器人运动技能学习、人机协作、家庭服务机器人、教育机器人等。它为研究人员提供了一个低成本、易于使用的平台,可以加速机器人学习算法的开发和验证。此外,ToddlerBot的开源设计也有助于推动机器人技术的普及和创新。
📄 摘要(原文)
Learning-based robotics research driven by data demands a new approach to robot hardware design-one that serves as both a platform for policy execution and a tool for embodied data collection to train policies. We introduce ToddlerBot, a low-cost, open-source humanoid robot platform designed for scalable policy learning and research in robotics and AI. ToddlerBot enables seamless acquisition of high-quality simulation and real-world data. The plug-and-play zero-point calibration and transferable motor system identification ensure a high-fidelity digital twin, enabling zero-shot policy transfer from simulation to the real world. A user-friendly teleoperation interface facilitates streamlined real-world data collection for learning motor skills from human demonstrations. Utilizing its data collection ability and anthropomorphic design, ToddlerBot is an ideal platform to perform whole-body loco-manipulation. Additionally, ToddlerBot's compact size (0.56m, 3.4kg) ensures safe operation in real-world environments. Reproducibility is achieved with an entirely 3D-printed, open-source design and commercially available components, keeping the total cost under 6,000 USD. Comprehensive documentation allows assembly and maintenance with basic technical expertise, as validated by a successful independent replication of the system. We demonstrate ToddlerBot's capabilities through arm span, payload, endurance tests, loco-manipulation tasks, and a collaborative long-horizon scenario where two robots tidy a toy session together. By advancing ML-compatibility, capability, and reproducibility, ToddlerBot provides a robust platform for scalable learning and dynamic policy execution in robotics research.