GO: The Great Outdoors Multimodal Dataset
作者: Peng Jiang, Kasi Viswanath, Akhil Nagariya, George Chustz, Maggie Wigness, Philip Osteen, Timothy Overbye, Christian Ellis, Long Quang, Srikanth Saripalli
分类: cs.RO
发布日期: 2025-01-31
备注: 5 pages, 5 figures
💡 一句话要点
GO数据集:用于非结构化环境地面机器人研究的多模态数据集
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多模态数据集 地面机器人 非结构化环境 语义分割 目标检测 SLAM 自主探索
📋 核心要点
- 现有越野数据集在数据模态和标注方面存在不足,限制了地面机器人在复杂非结构化环境中的研究。
- GO数据集通过提供六种传感器数据、高质量语义标注和GPS轨迹,为地面机器人研究提供全面支持。
- 该数据集包含多样化的环境条件,为开发更鲁棒的现场机器人、自主探索和感知系统提供了机会。
📝 摘要(中文)
Great Outdoors (GO) 数据集是一个多模态标注数据资源,旨在推进非结构化环境中的地面机器人研究。与现有的越野数据集相比,该数据集提供了最全面的数据模态和标注集。GO 数据集总共包含六种独特的传感器类型,具有高质量的语义标注和 GPS 轨迹,以支持语义分割、目标检测和 SLAM 等任务。数据集中呈现的多样化环境条件带来了重大的现实挑战,为开发更强大的解决方案提供了机会,以支持自然环境中现场机器人、自主探索和感知系统的持续发展。该数据集可在 https://www.unmannedlab.org/the-great-outdoors-dataset/ 下载。
🔬 方法详解
问题定义:现有的越野数据集在数据模态和标注方面存在局限性,无法充分支持地面机器人在复杂、非结构化自然环境中的研究。这些数据集可能缺乏足够种类或数量的传感器数据,语义标注质量不高,或者缺乏精确的定位信息,从而限制了算法的性能和泛化能力。
核心思路:GO数据集的核心思路是提供一个尽可能全面的多模态数据集,包含多种传感器数据、高质量的语义标注和精确的GPS轨迹,从而为地面机器人研究提供更丰富、更可靠的数据基础。通过提供多样化的环境条件,该数据集旨在推动更鲁棒的算法开发,使其能够更好地适应现实世界的复杂性和不确定性。
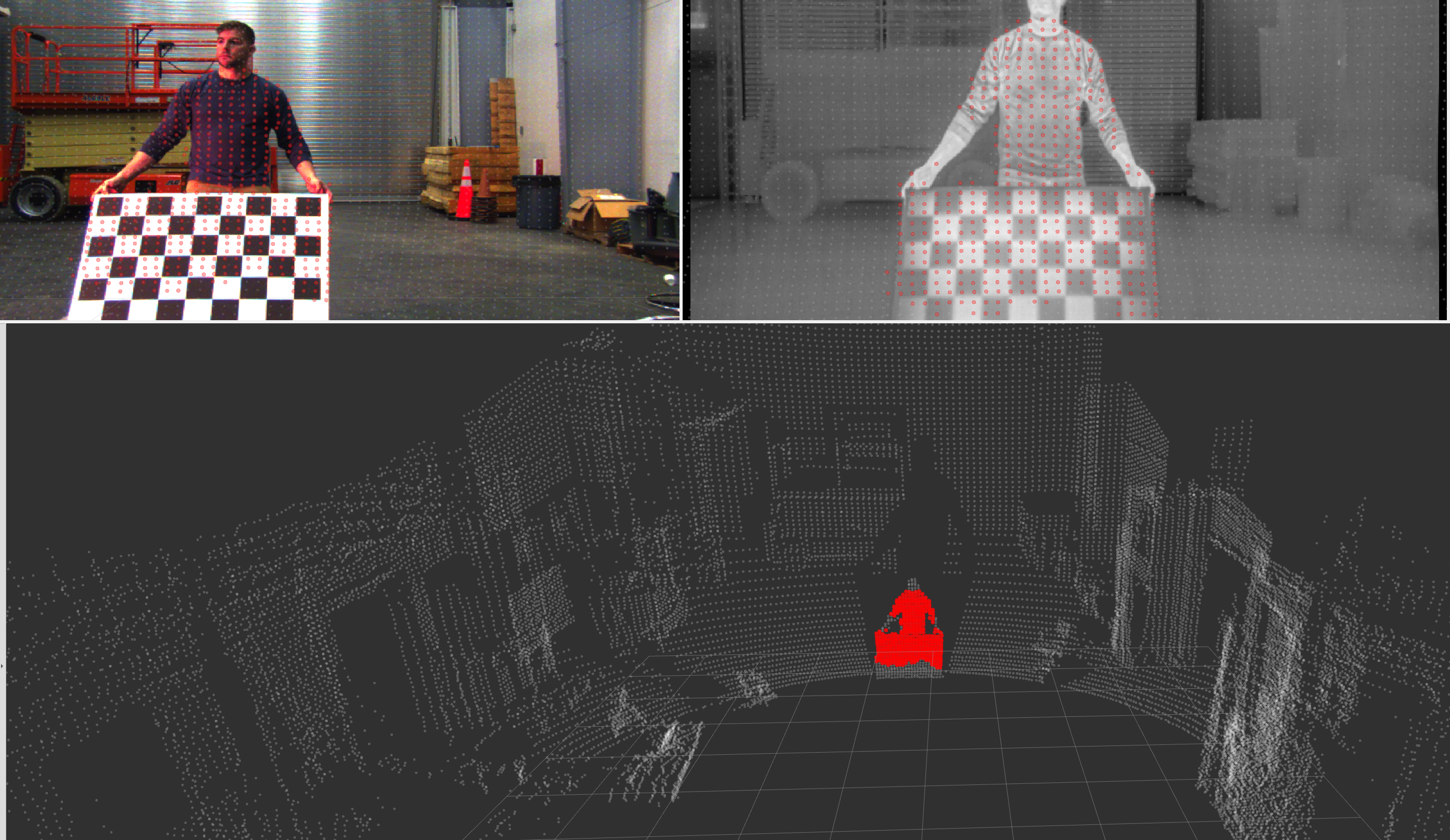
技术框架:GO数据集的整体框架围绕六种独特的传感器类型展开,包括但不限于RGB相机、激光雷达、惯性测量单元(IMU)和GPS。这些传感器数据经过同步和校准,并配以高质量的语义标注,例如像素级别的语义分割和目标检测框。此外,数据集还包含精确的GPS轨迹,用于支持SLAM等定位和建图任务。数据集的组织方式旨在方便研究人员进行数据访问和处理,并支持各种不同的研究方向。
关键创新:GO数据集的关键创新在于其数据模态的全面性和标注质量。与现有的越野数据集相比,GO数据集提供了更丰富、更全面的传感器数据,以及更高质量的语义标注。这种全面的数据资源为研究人员提供了更好的机会来开发更鲁棒、更准确的算法,从而推动地面机器人在非结构化环境中的应用。
关键设计:GO数据集的关键设计包括传感器选择、数据同步和校准、语义标注策略以及数据集组织方式。传感器选择旨在覆盖地面机器人研究所需的各种数据模态,例如视觉、激光雷达和惯性测量。数据同步和校准确保了不同传感器数据之间的时间和空间一致性。语义标注策略旨在提供高质量的像素级别语义分割和目标检测框。数据集组织方式旨在方便研究人员进行数据访问和处理,并支持各种不同的研究方向。
🖼️ 关键图片


📊 实验亮点
GO数据集提供了六种独特的传感器数据,包括RGB图像、激光雷达点云、IMU数据和GPS轨迹,并具有高质量的语义标注。与现有数据集相比,GO数据集在数据模态的全面性和标注质量上具有显著优势,为研究人员提供了更丰富、更可靠的数据基础,从而能够开发更鲁棒、更准确的算法。
🎯 应用场景
GO数据集可广泛应用于地面机器人、自主探索、环境感知等领域。它能够促进开发更鲁棒的算法,提升机器人在复杂自然环境中的导航、目标识别和环境理解能力。该数据集有助于推动农业、林业、灾害救援等领域的智能化发展,并为未来的机器人应用奠定基础。
📄 摘要(原文)
The Great Outdoors (GO) dataset is a multi-modal annotated data resource aimed at advancing ground robotics research in unstructured environments. This dataset provides the most comprehensive set of data modalities and annotations compared to existing off-road datasets. In total, the GO dataset includes six unique sensor types with high-quality semantic annotations and GPS traces to support tasks such as semantic segmentation, object detection, and SLAM. The diverse environmental conditions represented in the dataset present significant real-world challenges that provide opportunities to develop more robust solutions to support the continued advancement of field robotics, autonomous exploration, and perception systems in natural environments. The dataset can be downloaded at: https://www.unmannedlab.org/the-great-outdoors-dataset/