SpikingSoft: A Spiking Neuron Controller for Bio-inspired Locomotion with Soft Snake Robots
作者: Chuhan Zhang, Cong Wang, Wei Pan, Cosimo Della Santina
分类: cs.RO, cs.LG
发布日期: 2025-01-31 (更新: 2025-02-10)
备注: 8th IEEE-RAS International Conference on Soft Robotics
💡 一句话要点
SpikingSoft:基于脉冲神经元的软体蛇形机器人仿生运动控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 软体机器人 脉冲神经元 强化学习 仿生运动 运动控制
📋 核心要点
- 现有软体机器人运动控制方法难以有效利用其物理特性,限制了运动效率和灵活性。
- SpikingSoft利用双阈值脉冲神经元模型,通过调整阈值控制软体蛇形机器人的自然振荡,实现多样化运动。
- 仿真实验表明,SpikingSoft与强化学习结合,显著提升了软体蛇形机器人的运动性能和任务成功率。
📝 摘要(中文)
本研究受动物运动神经元与物理弹性的动态耦合启发,探索了利用低级脉冲神经机制激发软体蛇形机器人物理振荡,从而生成运动步态的可能性。为此,我们引入了具有可调阈值的双阈值脉冲神经元模型,以生成不同的输出模式。该神经元模型可以激发软体机器蛇的自然动力学,并通过简单地改变神经阈值来实现不同的运动,例如转弯或前进。最后,我们证明了我们的方法SpikingSoft可以自然地与强化学习配对和集成。高层智能体只需要调整两个阈值即可生成复杂的运动模式,从而大大简化了反应式运动的学习。仿真结果表明,与扭矩空间中的传统强化学习控制器或中央模式发生器控制器相比,所提出的架构显著提高了软体蛇形机器人的性能,使其能够以21.6%的成功率提升、29%的目标到达时间减少以及更平滑的运动来实现目标。
🔬 方法详解
问题定义:软体蛇形机器人的运动控制是一个复杂的问题,传统的控制方法通常依赖于精确的动力学模型和复杂的控制算法,难以充分利用软体结构的固有物理特性(如弹性)。这导致控制器的鲁棒性较差,难以适应环境变化,并且需要大量的计算资源。此外,如何有效地生成各种运动步态,例如前进、转弯等,也是一个挑战。
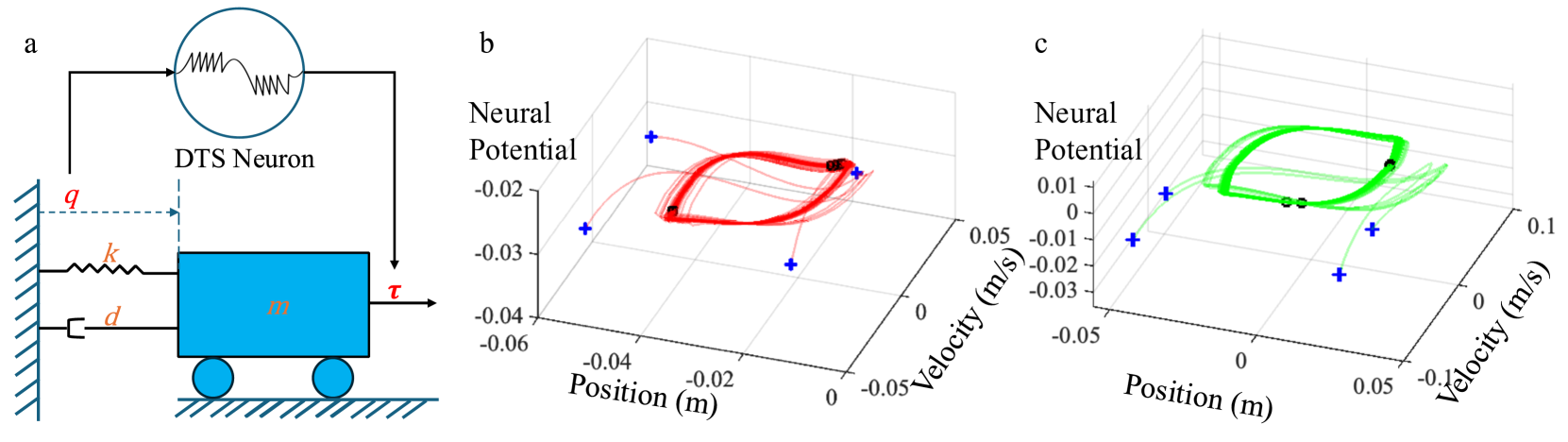
核心思路:本论文的核心思路是模仿生物神经系统,利用脉冲神经元来控制软体蛇形机器人的运动。通过设计一种具有可调阈值的双阈值脉冲神经元模型,可以激发软体结构的自然振荡,从而实现高效的运动。这种方法的关键在于利用软体结构的物理特性,而不是试图完全克服它们。通过调整神经元的阈值,可以控制运动的幅度和频率,从而实现不同的运动步态。
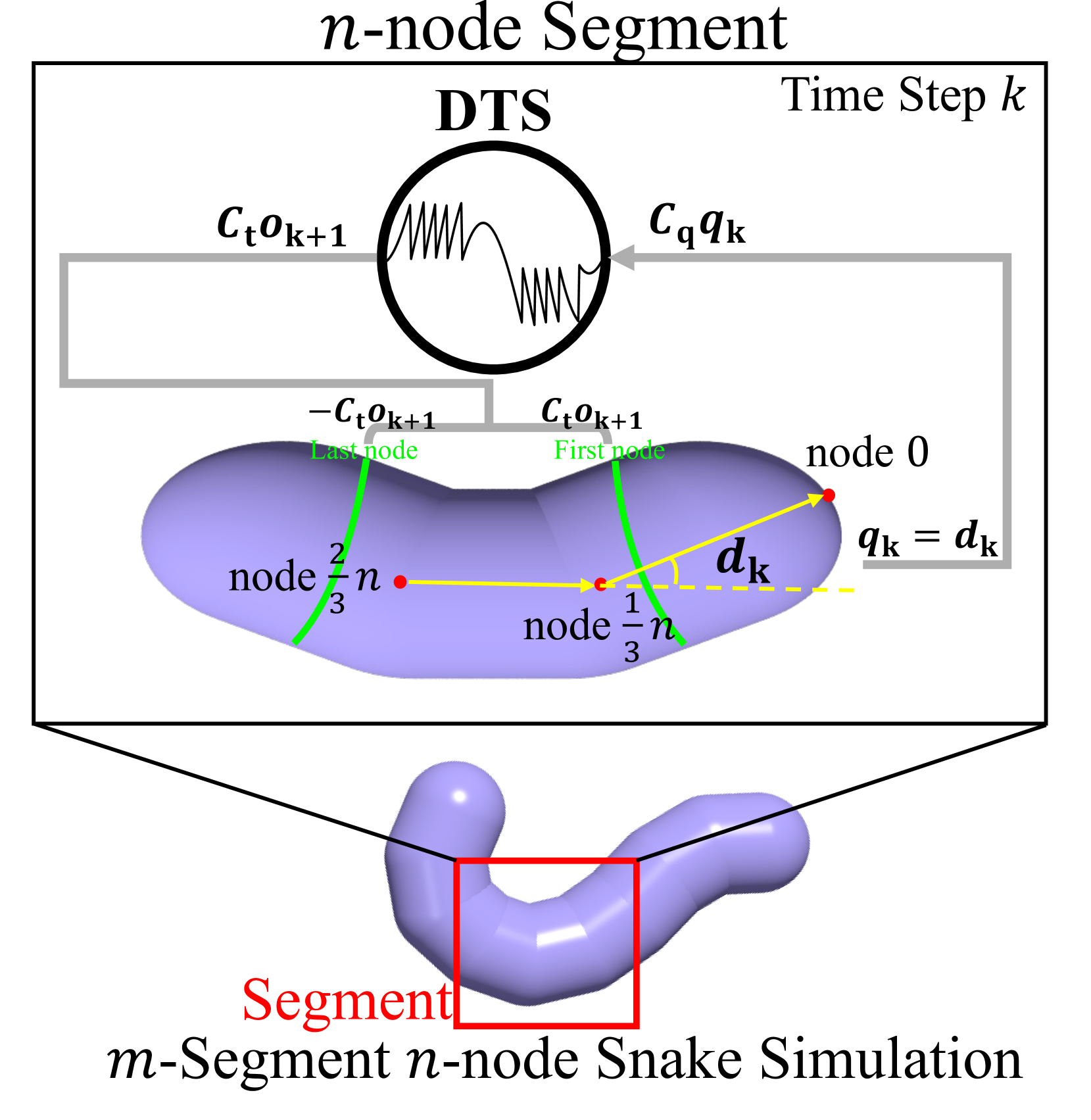
技术框架:SpikingSoft的整体架构包括一个双阈值脉冲神经元模型和一个软体蛇形机器人。脉冲神经元模型的输出直接控制软体机器人的关节。高层控制器(例如强化学习智能体)负责调整脉冲神经元的阈值,从而控制机器人的运动。整个系统可以看作是一个分层控制结构,低层负责执行运动,高层负责规划运动。
关键创新:本论文最重要的技术创新点在于提出了双阈值脉冲神经元模型,并将其应用于软体蛇形机器人的运动控制。与传统的脉冲神经元模型相比,双阈值模型具有更强的表达能力,可以生成更复杂的输出模式。此外,该方法将脉冲神经元与强化学习相结合,实现了端到端的运动控制,避免了手动设计控制器的复杂性。
关键设计:双阈值脉冲神经元模型包含两个阈值:一个用于激发神经元,另一个用于抑制神经元。通过调整这两个阈值,可以控制神经元的放电频率和模式。软体蛇形机器人由多个关节组成,每个关节由一个脉冲神经元控制。强化学习智能体使用策略梯度算法来优化神经元的阈值,目标是最大化机器人的运动效率和任务成功率。损失函数包括目标距离、时间消耗和平滑性惩罚项。
🖼️ 关键图片

📊 实验亮点
SpikingSoft在仿真实验中表现出色,与传统的强化学习控制器和中央模式发生器控制器相比,成功率提高了21.6%,目标到达时间减少了29%,并且运动更加平滑。这些结果表明,SpikingSoft能够有效地利用软体结构的物理特性,实现高效、鲁棒的运动控制。
🎯 应用场景
SpikingSoft在软体机器人领域具有广泛的应用前景,例如搜索救援、医疗康复和环境探索。其仿生设计和高效控制方法,能够使软体机器人更好地适应复杂环境,完成各种任务。未来,该技术有望应用于更复杂的软体机器人系统,并与其他人工智能技术相结合,实现更智能化的控制。
📄 摘要(原文)
Inspired by the dynamic coupling of moto-neurons and physical elasticity in animals, this work explores the possibility of generating locomotion gaits by utilizing physical oscillations in a soft snake by means of a low-level spiking neural mechanism. To achieve this goal, we introduce the Double Threshold Spiking neuron model with adjustable thresholds to generate varied output patterns. This neuron model can excite the natural dynamics of soft robotic snakes, and it enables distinct movements, such as turning or moving forward, by simply altering the neural thresholds. Finally, we demonstrate that our approach, termed SpikingSoft, naturally pairs and integrates with reinforcement learning. The high-level agent only needs to adjust the two thresholds to generate complex movement patterns, thus strongly simplifying the learning of reactive locomotion. Simulation results demonstrate that the proposed architecture significantly enhances the performance of the soft snake robot, enabling it to achieve target objectives with a 21.6% increase in success rate, a 29% reduction in time to reach the target, and smoother movements compared to the vanilla reinforcement learning controllers or Central Pattern Generator controller acting in torque space.