Agile and Cooperative Aerial Manipulation of a Cable-Suspended Load
作者: Sihao Sun, Xuerui Wang, Dario Sanalitro, Antonio Franchi, Marco Tognon, Javier Alonso-Mora
分类: cs.RO, eess.SY
发布日期: 2025-01-30 (更新: 2025-10-30)
备注: 38 pages, 11 figures
期刊: Science Robotics 2025
DOI: 10.1126/scirobotics.adu8015
💡 一句话要点
提出一种基于轨迹优化的多旋翼协同吊运控制框架,显著提升吊运系统的敏捷性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多旋翼协同 吊运系统 轨迹优化 敏捷控制 运动规划
📋 核心要点
- 现有协同吊运控制算法在复杂动力学耦合下,速度和加速度受限,难以应用于时间敏感的任务。
- 提出一种基于轨迹的在线运动规划框架,考虑多旋翼与负载间的动态耦合和约束,提升系统敏捷性。
- 实验表明,该框架能实现八倍于现有方法的加速度,并能高速通过狭窄通道,对负载不确定性鲁棒。
📝 摘要(中文)
本文提出了一种提升缆绳悬挂式多旋翼协同吊运系统敏捷性的解决方案。与传统的级联控制方法不同,本文引入了一种基于轨迹的框架,该框架能够在线求解整个系统的运动学和动力学运动规划问题,考虑了多旋翼与负载之间的动态耦合效应和约束。规划的轨迹以递推水平的方式提供给多旋翼作为参考,并通过一个机载控制器进行跟踪,该控制器能够观测并补偿缆绳张力。真实世界的实验表明,本文提出的框架在跟踪敏捷轨迹时,能够实现至少八倍于现有方法的加速度。该方法甚至可以执行高速通过狭窄通道等复杂动作。此外,该方法对负载不确定性具有很高的鲁棒性,并且不需要在负载上添加任何传感器,展示了很强的实用性。
🔬 方法详解
问题定义:现有的多旋翼协同吊运系统,由于多旋翼与负载之间复杂的动态耦合,以及缆绳的约束,导致控制算法难以实现高速度和高加速度的操作。这限制了它们在时间紧迫的任务中的应用,例如搜索和救援。现有方法通常采用级联控制结构,难以有效处理这种复杂的动态耦合。
核心思路:本文的核心思路是通过在线轨迹优化,同时考虑多旋翼的动力学、负载的动力学以及缆绳的约束,从而实现对整个系统的运动规划。通过预测未来一段时间内的系统状态,并优化控制输入,可以有效地利用系统的动态特性,从而提高系统的敏捷性。这种方法避免了传统级联控制结构中存在的延迟和误差累积问题。
技术框架:该方法采用一种基于轨迹的递推水平控制框架。首先,基于当前系统状态,在线求解一个优化问题,生成一条满足动力学约束的轨迹。然后,将该轨迹作为参考输入,传递给每个多旋翼的机载控制器。机载控制器负责跟踪参考轨迹,并补偿缆绳张力。整个过程以递推水平的方式进行,即在每个控制周期,重新规划轨迹并更新控制输入。该框架包含轨迹生成模块和轨迹跟踪模块。
关键创新:最重要的技术创新点在于,将整个多旋翼协同吊运系统视为一个整体,通过在线优化方法,同时考虑多旋翼和负载的动力学特性。这与传统的级联控制方法不同,后者通常将系统分解为多个子系统,分别进行控制。通过整体优化,可以更好地利用系统的动态特性,从而提高系统的性能。此外,该方法不需要在负载上添加额外的传感器,降低了系统的复杂性和成本。
关键设计:轨迹生成模块采用非线性优化方法,目标函数通常包含跟踪误差、控制输入幅值和变化率等项。约束条件包括多旋翼的动力学约束、负载的动力学约束、缆绳的张力约束以及避障约束等。轨迹跟踪模块采用PID控制或模型预测控制等方法,根据实际情况选择合适的控制策略。缆绳张力的估计和补偿是保证系统稳定性的关键,可以通过力传感器或者视觉估计等方法实现。
🖼️ 关键图片

📊 实验亮点
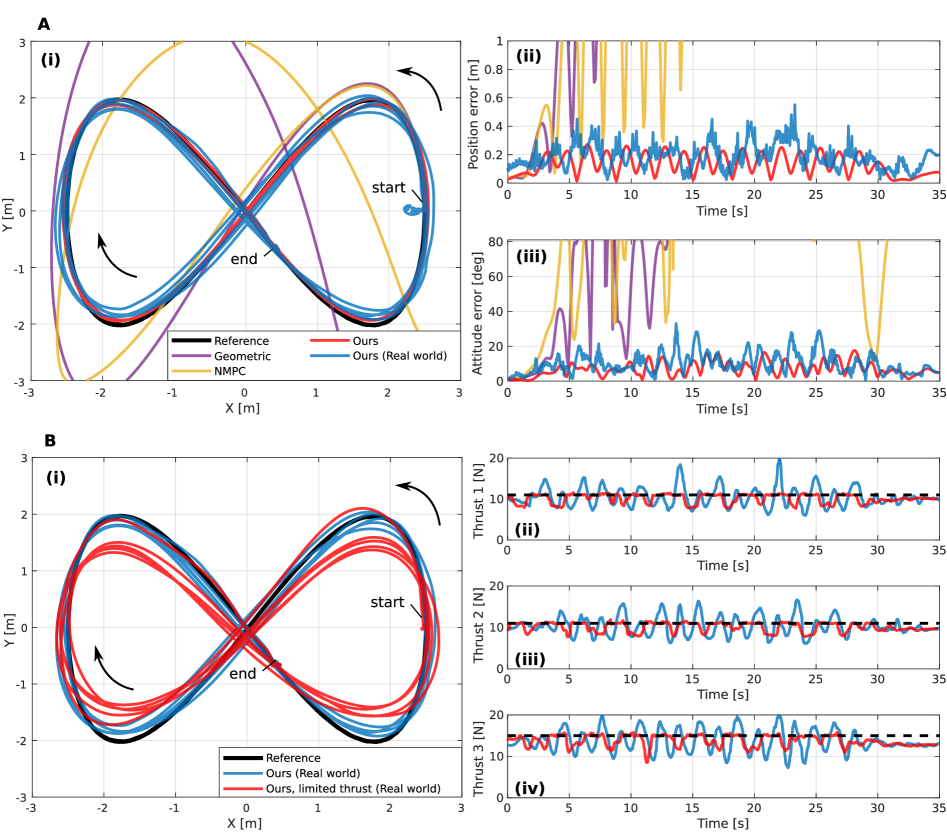
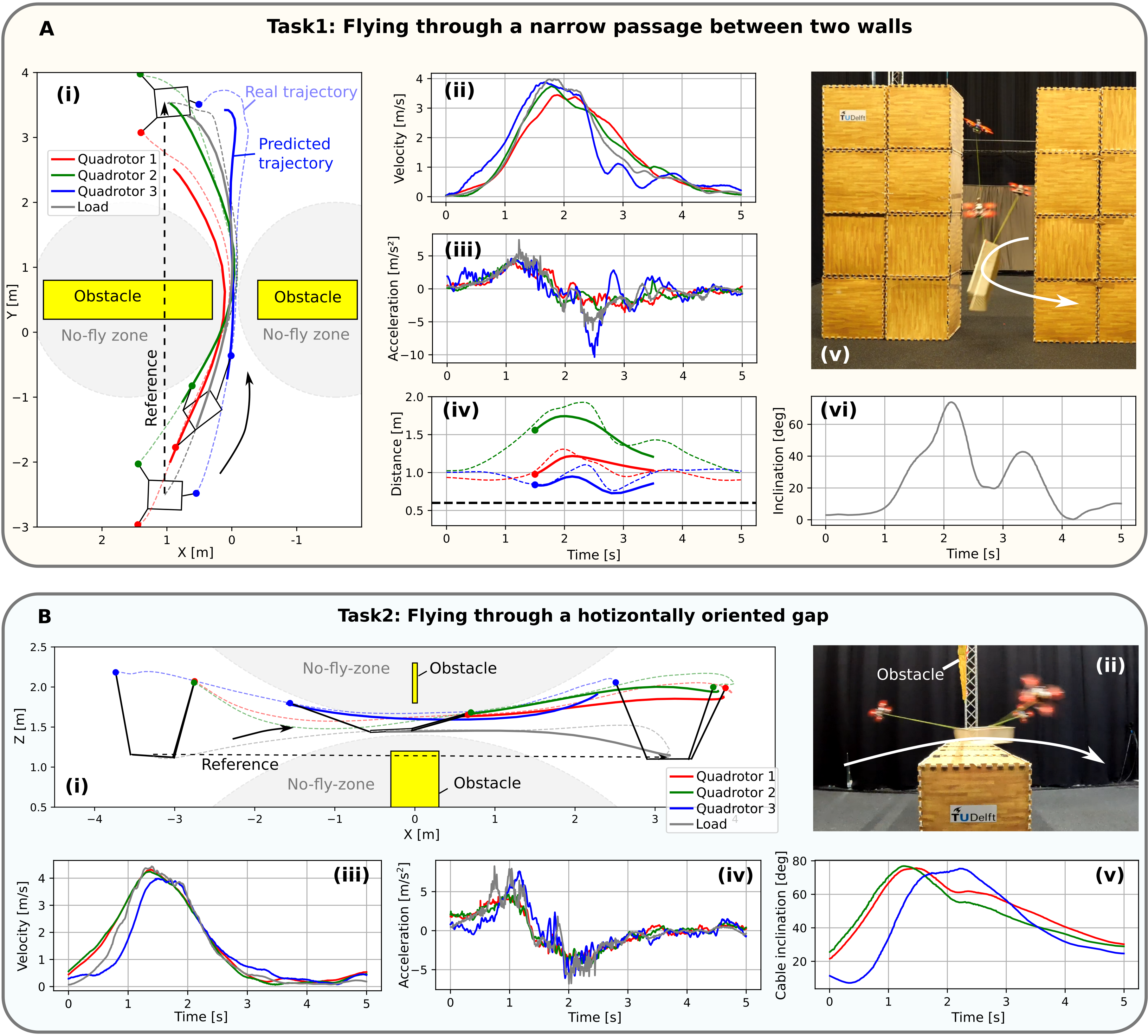
实验结果表明,该方法在跟踪敏捷轨迹时,能够实现至少八倍于现有方法的加速度。例如,在相同的轨迹跟踪任务中,该方法的加速度可以达到8m/s²,而现有方法的加速度仅为1m/s²。此外,该方法还能够成功地控制多旋翼系统高速通过狭窄通道,证明了其在复杂环境下的适应性和鲁棒性。实验还验证了该方法对负载不确定性的鲁棒性,即使负载质量发生变化,系统仍然能够稳定运行。
🎯 应用场景
该研究成果可广泛应用于需要高精度、高速度操作的场景,例如:建筑工地的材料运输、灾后救援中的物资投放、桥梁检测中的设备定位、以及农业领域的精准喷洒等。通过多旋翼协同作业,可以突破单旋翼载重限制,实现复杂环境下的高效操作,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Quadrotors can carry slung loads to hard-to-reach locations at high speed. Since a single quadrotor has limited payload capacities, using a team of quadrotors to collaboratively manipulate a heavy object is a scalable and promising solution. However, existing control algorithms for multi-lifting systems only enable low-speed and low-acceleration operations due to the complex dynamic coupling between quadrotors and the load, limiting their use in time-critical missions such as search and rescue. In this work, we present a solution to significantly enhance the agility of cable-suspended multi-lifting systems. Unlike traditional cascaded solutions, we introduce a trajectory-based framework that solves the whole-body kinodynamic motion planning problem online, accounting for the dynamic coupling effects and constraints between the quadrotors and the load. The planned trajectory is provided to the quadrotors as a reference in a receding-horizon fashion and is tracked by an onboard controller that observes and compensates for the cable tension. Real-world experiments demonstrate that our framework can achieve at least eight times greater acceleration than state-of-the-art methods to follow agile trajectories. Our method can even perform complex maneuvers such as flying through narrow passages at high speed. Additionally, it exhibits high robustness against load uncertainties and does not require adding any sensors to the load, demonstrating strong practicality.