Watch Your STEPP: Semantic Traversability Estimation using Pose Projected Features
作者: Sebastian Ægidius, Dennis Hadjivelichkov, Jianhao Jiao, Jonathan Embley-Riches, Dimitrios Kanoulas
分类: cs.RO, cs.CV
发布日期: 2025-01-29
备注: 7 pages, 7 figures
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
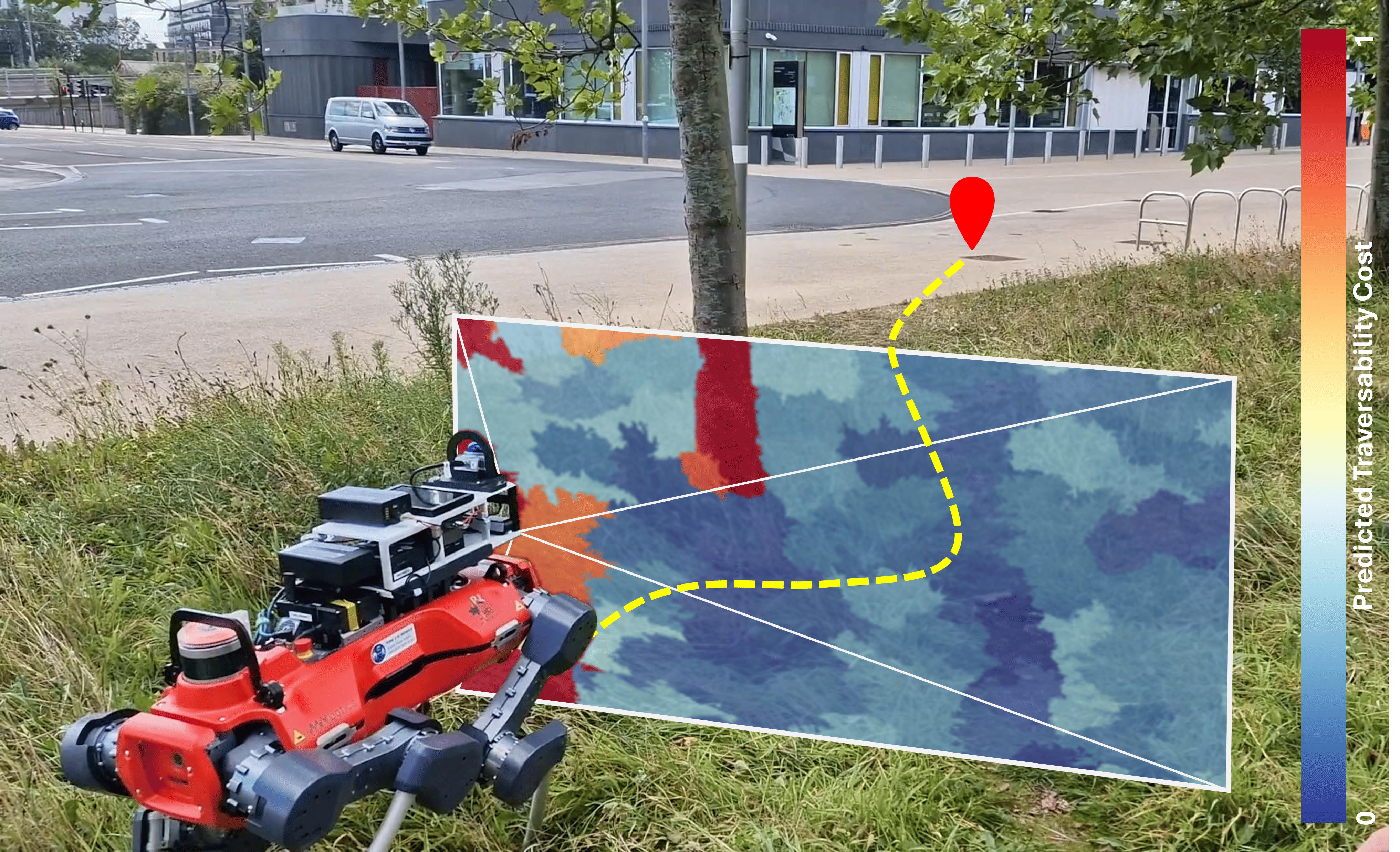
提出基于姿态投影特征的语义可通行性估计方法STEPP,用于提升机器人复杂地形导航能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 地形可通行性估计 腿式机器人导航 视觉Transformer DINOv2 重建损失 模仿学习 姿态投影
📋 核心要点
- 传统占据栅格地图难以适应腿式机器人等复杂平台的移动能力,无法有效评估地形可通行性。
- 利用DINOv2视觉Transformer提取地形特征,通过重建损失区分熟悉和危险地形,实现可通行性估计。
- 在ANYmal腿式机器人上进行实验,验证了该方法在室内外复杂地形导航中的有效性。
📝 摘要(中文)
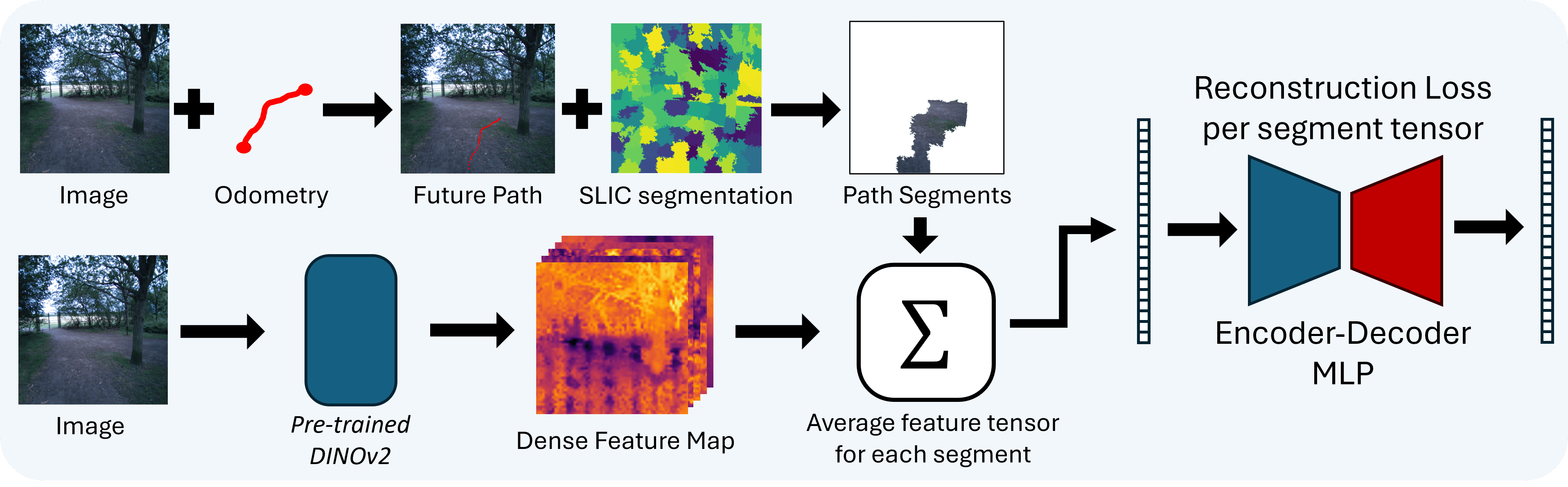
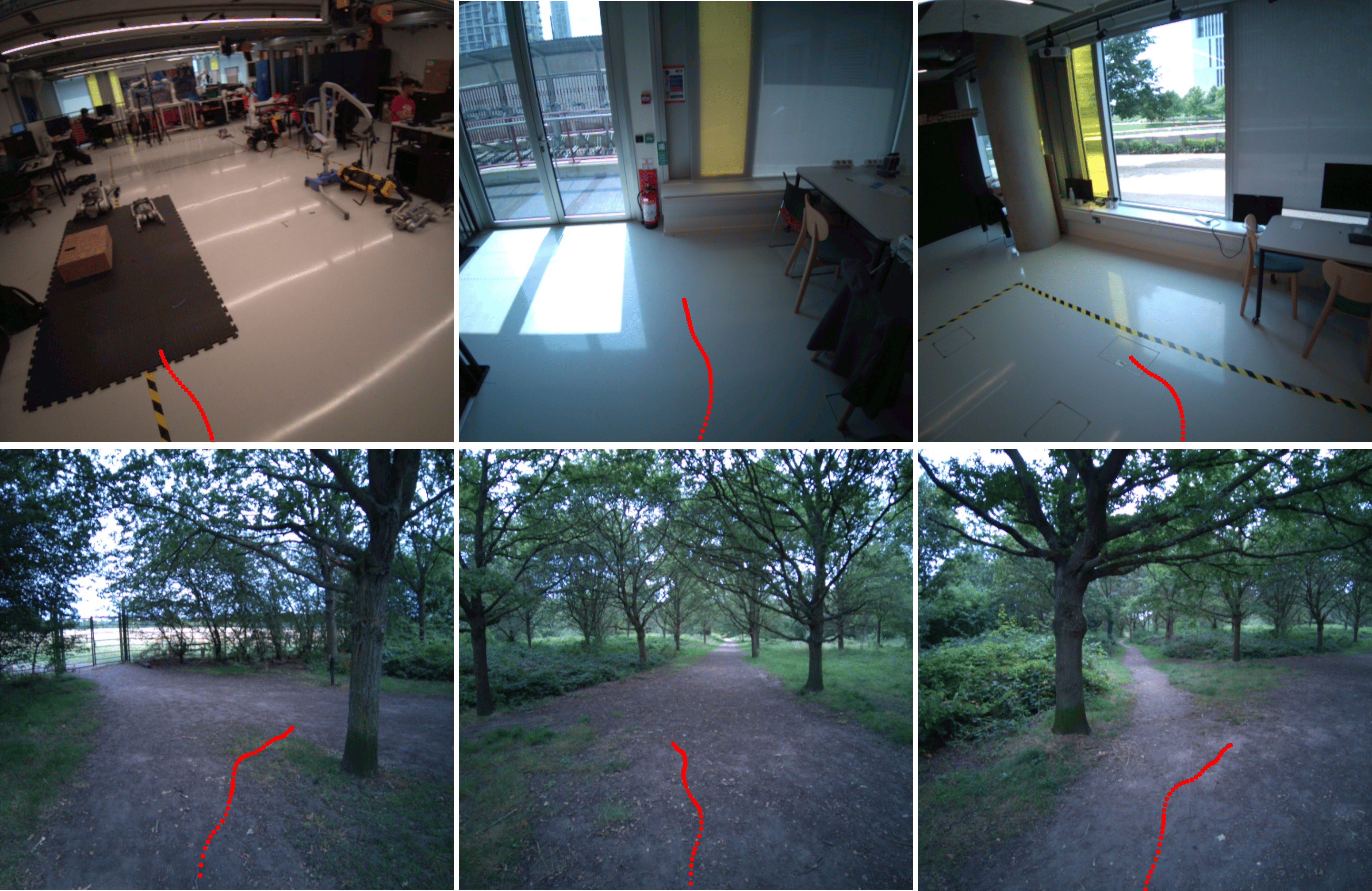
理解地形的可通行性对于自主机器人导航至关重要,尤其是在自然景观等非结构化环境中。传统方法(如占据栅格地图)虽然提供了基本框架,但通常无法考虑腿式机器人等平台复杂的移动能力。本文提出了一种通过学习人类行走演示来估计地形可通行性的方法。该方法利用DINOv2视觉Transformer模型生成密集的像素级特征嵌入,并通过编码器-解码器MLP架构处理以分析地形片段。从感兴趣区域的掩码区域提取的平均特征向量用于在基于重建的框架中训练模型。通过最小化重建损失,网络可以区分熟悉的、重建误差较低的地形,以及不熟悉的或危险的、重建误差较高的地形。这种方法有助于检测异常,使腿式机器人能够更有效地在具有挑战性的地形中导航。我们在ANYmal腿式机器人上进行了室内和室外真实环境实验,证明了所提出方法的有效性。代码已开源,视频演示可在我们的网站上找到。
🔬 方法详解
问题定义:论文旨在解决腿式机器人在复杂非结构化环境中自主导航时,如何准确评估地形可通行性的问题。现有方法,如基于占据栅格地图的方法,无法充分考虑腿式机器人独特的运动学和动力学特性,导致在复杂地形中导航性能受限。这些方法通常依赖于几何信息,忽略了地形的语义信息,难以区分细微的地形差异,例如松软的土壤或隐藏的障碍物。
核心思路:论文的核心思路是通过模仿学习,从人类行走的演示中学习地形的可通行性。其基本假设是,人类能够有效地评估地形的安全性和可行性,因此可以通过学习人类的行走模式来指导机器人的导航。通过将地形图像转换为高维特征向量,并利用重建损失来区分安全和危险地形,从而实现可通行性的估计。这种方法的核心在于利用深度学习模型学习地形的语义信息,并将其与可通行性联系起来。
技术框架:该方法的技术框架主要包括以下几个阶段:1) 特征提取:使用DINOv2视觉Transformer模型从地形图像中提取密集的像素级特征嵌入。2) 区域选择:通过姿态投影,确定机器人脚部可能接触的区域,并生成掩码。3) 特征聚合:对掩码区域内的特征向量进行平均,得到该区域的代表性特征向量。4) 可通行性评估:使用编码器-解码器MLP架构对特征向量进行重建,并计算重建损失。重建损失的大小反映了地形的熟悉程度,损失越大,表示地形越不熟悉或越危险。5) 导航决策:根据可通行性评估结果,机器人可以调整其运动策略,避开危险区域,选择安全路径。
关键创新:该方法最重要的技术创新点在于将视觉Transformer模型(DINOv2)与重建损失相结合,用于估计地形的可通行性。与传统方法相比,该方法能够学习地形的语义信息,并将其与可通行性联系起来,从而更准确地评估地形的安全性。此外,该方法还利用姿态投影来确定机器人脚部可能接触的区域,从而提高了可通行性评估的效率和准确性。
关键设计:在关键设计方面,DINOv2的选择至关重要,因为它能够提供丰富的视觉特征,捕捉地形的细微差异。编码器-解码器MLP架构的设计旨在学习地形特征的潜在表示,并利用重建损失来区分安全和危险地形。重建损失函数的选择也至关重要,论文可能采用了均方误差或其他适合高维特征向量的损失函数。此外,姿态投影的准确性也直接影响可通行性评估的准确性,因此需要仔细校准机器人和相机的姿态。
🖼️ 关键图片
📊 实验亮点
该论文在ANYmal腿式机器人上进行了室内和室外真实环境实验,验证了所提出方法的有效性。实验结果表明,该方法能够有效地检测异常地形,并使机器人能够更安全地在复杂地形中导航。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明该方法具有实际应用价值。
🎯 应用场景
该研究成果可广泛应用于腿式机器人在复杂地形中的自主导航,例如搜救、勘探、农业和建筑等领域。通过提高机器人在非结构化环境中的导航能力,可以使其在这些领域发挥更大的作用,例如在灾难现场进行搜救,在农田中进行作物监测,或在建筑工地进行安全巡检。此外,该方法还可以应用于其他类型的机器人,例如轮式机器人和无人机,以提高其在复杂环境中的导航能力。
📄 摘要(原文)
Understanding the traversability of terrain is essential for autonomous robot navigation, particularly in unstructured environments such as natural landscapes. Although traditional methods, such as occupancy mapping, provide a basic framework, they often fail to account for the complex mobility capabilities of some platforms such as legged robots. In this work, we propose a method for estimating terrain traversability by learning from demonstrations of human walking. Our approach leverages dense, pixel-wise feature embeddings generated using the DINOv2 vision Transformer model, which are processed through an encoder-decoder MLP architecture to analyze terrain segments. The averaged feature vectors, extracted from the masked regions of interest, are used to train the model in a reconstruction-based framework. By minimizing reconstruction loss, the network distinguishes between familiar terrain with a low reconstruction error and unfamiliar or hazardous terrain with a higher reconstruction error. This approach facilitates the detection of anomalies, allowing a legged robot to navigate more effectively through challenging terrain. We run real-world experiments on the ANYmal legged robot both indoor and outdoor to prove our proposed method. The code is open-source, while video demonstrations can be found on our website: https://rpl-cs-ucl.github.io/STEPP