Realtime Limb Trajectory Optimization for Humanoid Running Through Centroidal Angular Momentum Dynamics
作者: Sait Sovukluk, Robert Schuller, Johannes Englsberger, Christian Ott
分类: cs.RO
发布日期: 2025-01-29 (更新: 2025-07-24)
备注: This paper has been accepted for publication at the IEEE International Conference on Robotics and Automation (ICRA), Atlanta 2025. Link to video: https://www.youtube.com/watch?v=czfHjwh_A0Y
DOI: 10.1109/ICRA55743.2025.11127382
💡 一句话要点
提出基于质心角动量动力学的人形机器人实时腿部轨迹优化方法,用于跑步控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 跑步控制 轨迹优化 角动量 非线性优化
📋 核心要点
- 人形机器人跑步中,飞行阶段的腿部轨迹对后续站立阶段的稳定至关重要,但现有方法难以有效处理角动量守恒带来的影响。
- 该论文提出了一种实时非线性优化方法,通过优化腿部轨迹,在考虑角动量的情况下,提高人形机器人跑步的稳定性。
- 该方法在两种不同的人形机器人模型上进行了仿真验证,结果表明生成的轨迹能够有效支持机器人跑步。
📝 摘要(中文)
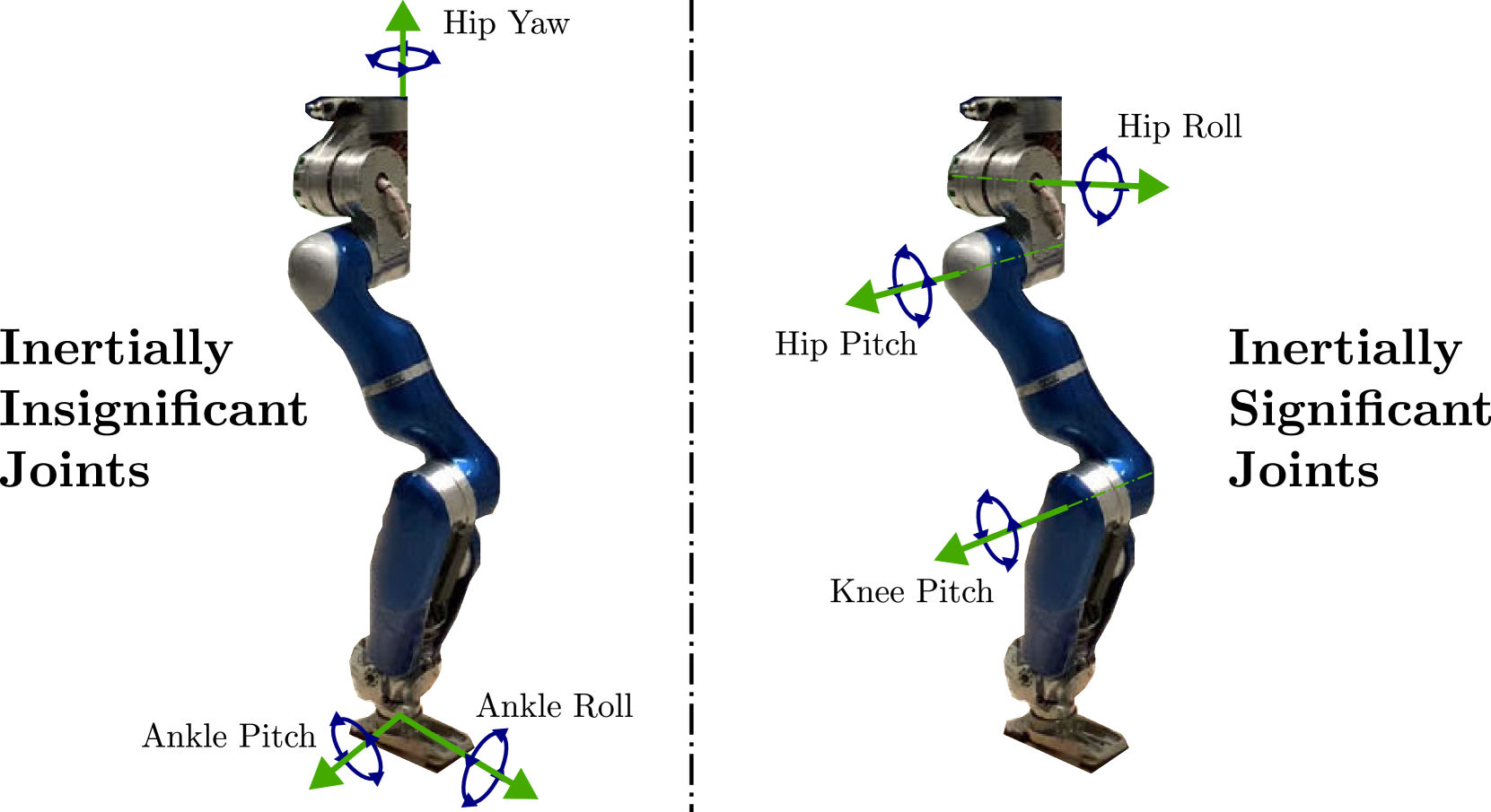
人形机器人跑步的关键方面之一是确定腿部摆动轨迹。在无地面反作用力调节的飞行阶段,腿部摆动轨迹对于下一个站立阶段的稳定性至关重要。由于角动量守恒,不正确的腿和手臂摆动会导致下一个站立阶段着陆时身体高度倾斜且无法维持的姿态。在这种情况下,无论质心轨迹的稳定性如何,机器人系统都无法维持运动。对于快速和高飞行时间的轨迹,这个问题更加明显。本文提出了一种用于人形机器人跑步的实时非线性腿部轨迹优化问题。该优化问题在两种不同的人形机器人模型上进行了测试,并且生成的轨迹通过仿真环境中的跑步算法进行了验证。
🔬 方法详解
问题定义:人形机器人跑步过程中,尤其是在飞行阶段,如何规划腿部摆动轨迹,以确保在下一个站立阶段能够稳定着陆是一个关键问题。现有的方法往往忽略了角动量守恒的影响,导致机器人着陆时姿态不稳,甚至无法维持运动。尤其是在高速和高飞行时间的跑步场景下,这个问题更加突出。
核心思路:该论文的核心思路是通过优化腿部轨迹来控制机器人的角动量,从而提高跑步的稳定性。通过在优化过程中显式地考虑角动量守恒,可以生成更合理的腿部摆动轨迹,使得机器人在着陆时能够保持平衡。
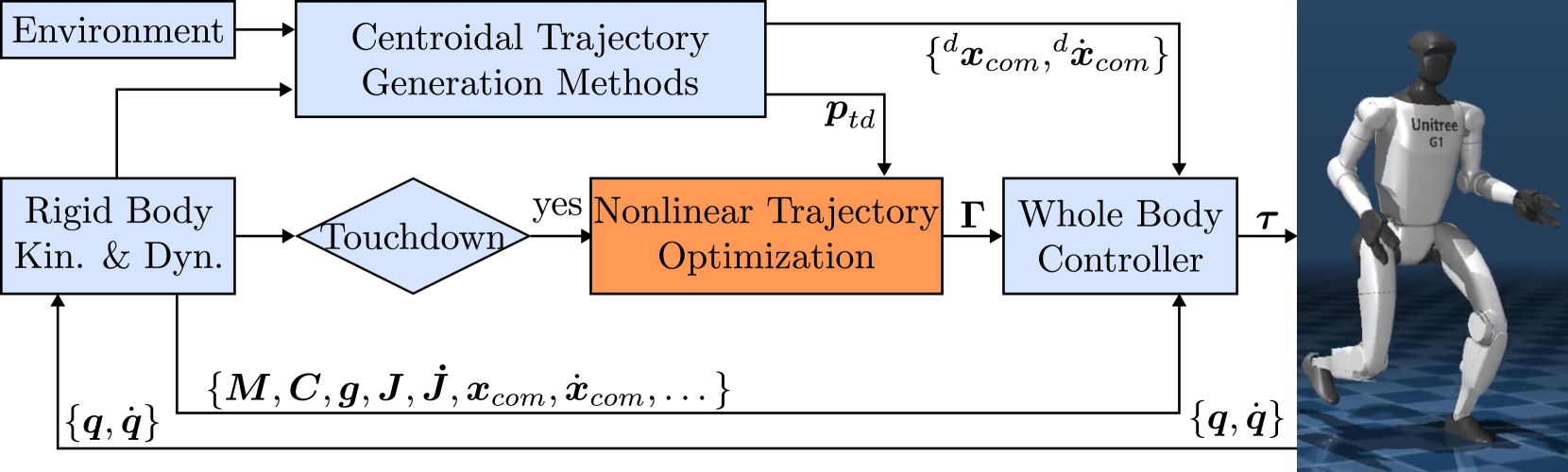
技术框架:该方法采用实时非线性优化框架。首先,定义一个优化问题,其目标是生成满足约束条件的腿部轨迹。约束条件包括机器人的运动学约束、动力学约束以及角动量约束。然后,使用非线性优化算法求解该优化问题,得到最优的腿部轨迹。最后,将生成的轨迹应用于机器人控制系统,实现跑步运动。
关键创新:该论文的关键创新在于将角动量动力学显式地纳入到腿部轨迹优化问题中。通过考虑角动量守恒,可以生成更符合物理规律的腿部轨迹,从而提高机器人的跑步稳定性。与现有方法相比,该方法能够更好地处理高速和高飞行时间的跑步场景。
关键设计:该优化问题包含多个关键设计。首先,需要选择合适的优化变量,例如腿部关节角度或末端执行器的位置。其次,需要定义合适的约束条件,例如关节角度的上下限、速度和加速度的限制以及角动量的约束。第三,需要选择合适的优化算法,例如序列二次规划(SQP)或内点法。此外,还需要设计合适的损失函数,例如最小化关节力矩或能量消耗。
🖼️ 关键图片

📊 实验亮点
该论文在两种不同的人形机器人模型上进行了仿真实验。实验结果表明,该方法能够生成有效的腿部轨迹,使得机器人能够在仿真环境中实现稳定的跑步运动。具体的性能数据(例如跑步速度、稳定性指标等)和与基线方法的对比结果(如果有)未知,但仿真结果验证了该方法的有效性。
🎯 应用场景
该研究成果可应用于各种人形机器人跑步场景,例如体育竞技、搜救行动和复杂地形穿越。通过优化腿部轨迹,可以提高机器人的跑步速度、稳定性和适应性,使其能够在更广泛的环境中执行任务。此外,该方法还可以扩展到其他类型的机器人运动控制问题,例如跳跃和攀爬。
📄 摘要(原文)
One of the essential aspects of humanoid robot running is determining the limb-swinging trajectories. During the flight phases, where the ground reaction forces are not available for regulation, the limb swinging trajectories are significant for the stability of the next stance phase. Due to the conservation of angular momentum, improper leg and arm swinging results in highly tilted and unsustainable body configurations at the next stance phase landing. In such cases, the robotic system fails to maintain locomotion independent of the stability of the center of mass trajectories. This problem is more apparent for fast and high flight time trajectories. This paper proposes a real-time nonlinear limb trajectory optimization problem for humanoid running. The optimization problem is tested on two different humanoid robot models, and the generated trajectories are verified using a running algorithm for both robots in a simulation environment.