Joint Decision-Making in Robot Teleoperation: When are Two Heads Better Than One?
作者: Duc-An Nguyen, Raunak Bhattacharyya, Clara Colombatto, Steve Fleming, Ingmar Posner, Nick Hawes
分类: cs.HC, cs.RO
发布日期: 2025-01-28
备注: To be published in the 2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI)
💡 一句话要点
提出基于置信度共享的机器人遥操作协同决策方法,提升复杂任务性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人遥操作 协同决策 置信度共享 人机协作 群体智能
📋 核心要点
- 单人操作员在不确定环境下遥操作机器人进行决策面临挑战,尤其是在安全攸关领域。
- 该研究提出一种基于置信度共享的协同决策方法,旨在提升双人操作员在动态遥操作任务中的决策质量。
- 实验结果表明,协同决策优于表现最佳的个体,且性能提升受个体技能水平和置信度校准程度的影响。
📝 摘要(中文)
在安全攸关领域,操作员在不确定性下操作机器人进行决策仍然是一个具有挑战性的问题。本文研究了双人操作员协同决策是否优于单人操作员。虽然先前工作表明“人多力量大”,但这些研究主要局限于静态和被动任务。本文通过人类遥操作机器人的动态任务,研究了协同决策。通过包含100名参与者的人类实验,每个人都使用模拟中的两个移动机器人执行导航任务。结果表明,通过置信度共享进行协同决策,能够超越表现最佳的个体(p<0.0001)。此外,这种优势受到个体技能水平和置信度校准程度的影响。最后,本文还提出了基于个体组成的双人组置信度校准的特征分析。研究结果首次证明,即使在包含机器人主动控制的时空任务中,协同决策也优于单人决策。
🔬 方法详解
问题定义:论文旨在解决单人操作员在复杂、动态的机器人遥操作任务中,由于信息不足和决策压力导致的性能瓶颈问题。现有方法通常依赖于单个操作员的经验和直觉,难以应对不确定性和突发情况,尤其是在安全攸关的场景下。
核心思路:论文的核心思路是利用多个操作员的集体智慧,通过共享彼此的置信度信息,实现更准确、更鲁棒的决策。这种方法借鉴了“群体智慧”的概念,认为多个独立的判断可以有效降低错误率,提升整体性能。通过置信度共享,操作员可以互相补充信息,纠正错误,从而做出更明智的决策。
技术框架:整体框架包含两个操作员,他们分别控制一个或多个机器人执行导航任务。操作员之间可以进行通信,共享各自对当前状态的理解和决策的置信度。系统会根据操作员的置信度,对他们的决策进行加权融合,最终生成控制指令。实验中,操作员在模拟环境中进行遥操作,系统记录操作员的决策、置信度以及最终的任务完成情况。
关键创新:该研究的关键创新在于将置信度共享机制引入到机器人遥操作的协同决策中。以往的协同决策研究主要集中在静态任务或被动观察任务中,而该研究首次在动态、主动控制的遥操作任务中验证了协同决策的有效性。此外,该研究还深入分析了个体技能水平和置信度校准程度对协同决策性能的影响。
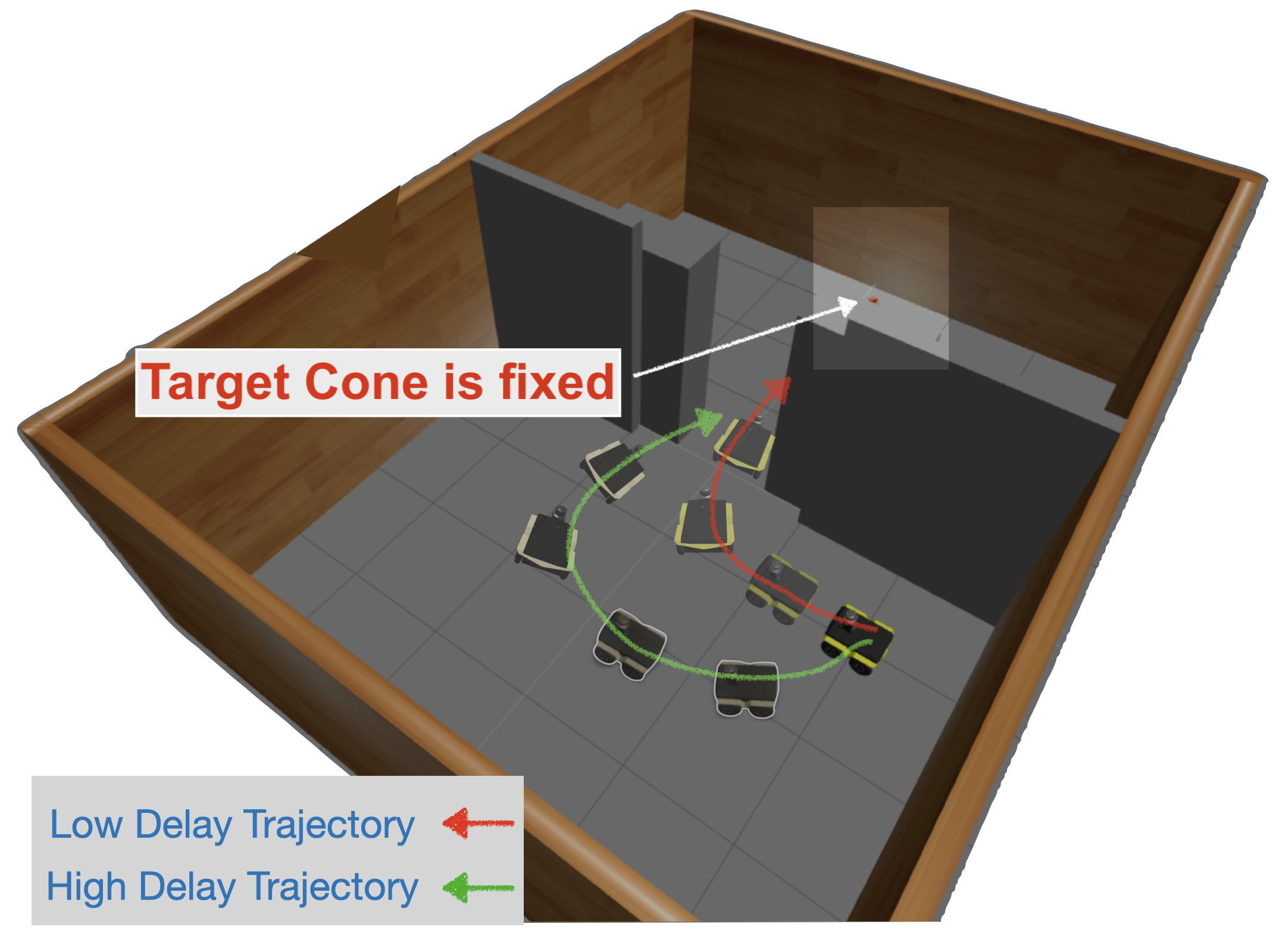
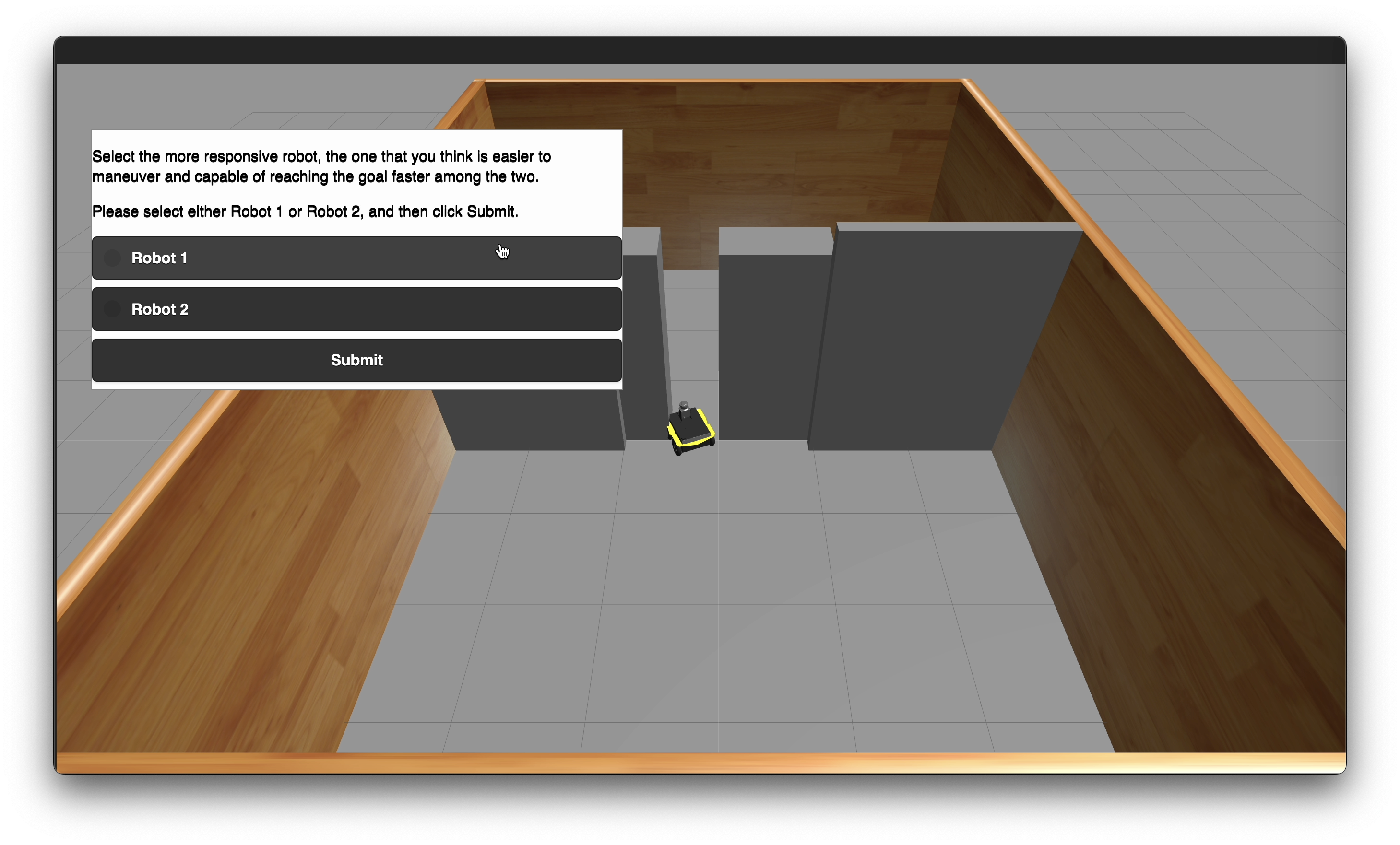
关键设计:实验设计中,参与者需要控制两个移动机器人在模拟环境中完成导航任务。任务难度可调,以模拟不同的操作环境。操作员可以通过界面输入他们对当前决策的置信度,范围从0到1。系统使用加权平均的方法融合两个操作员的决策,权重由他们的置信度决定。实验数据包括任务完成时间、碰撞次数、操作员的决策和置信度等。通过统计分析,研究人员评估了协同决策的性能,并分析了影响性能的因素。
🖼️ 关键图片

📊 实验亮点
实验结果表明,通过置信度共享进行协同决策,双人组的性能超越了表现最佳的个体(p<0.0001)。研究还发现,个体技能水平和置信度校准程度显著影响协同决策的性能。技能水平较高的个体和置信度校准良好的个体,在协同决策中能够发挥更大的作用。这些发现为设计更有效的协同遥操作系统提供了理论依据。
🎯 应用场景
该研究成果可应用于多种需要远程操作机器人的场景,例如:灾难救援、太空探索、深海作业、核电站维护等。通过协同决策,可以提高任务的安全性、效率和可靠性,降低操作风险。未来,该研究可以扩展到更多操作员的协同,并结合人工智能技术,实现人机协同的智能决策。
📄 摘要(原文)
Operators working with robots in safety-critical domains have to make decisions under uncertainty, which remains a challenging problem for a single human operator. An open question is whether two human operators can make better decisions jointly, as compared to a single operator alone. While prior work has shown that two heads are better than one, such studies have been mostly limited to static and passive tasks. We investigate joint decision-making in a dynamic task involving humans teleoperating robots. We conduct a human-subject experiment with $N=100$ participants where each participant performed a navigation task with two mobiles robots in simulation. We find that joint decision-making through confidence sharing improves dyad performance beyond the better-performing individual (p<0.0001). Further, we find that the extent of this benefit is regulated both by the skill level of each individual, as well as how well-calibrated their confidence estimates are. Finally, we present findings on characterising the human-human dyad's confidence calibration based on the individuals constituting the dyad. Our findings demonstrate for the first time that two heads are better than one, even on a spatiotemporal task which includes active operator control of robots.