3D Reconstruction of non-visible surfaces of objects from a Single Depth View -- Comparative Study
作者: Rafał Staszak, Piotr Michałek, Jakub Chudziński, Marek Kopicki, Dominik Belter
分类: cs.RO, cs.CV
发布日期: 2025-01-27
💡 一句话要点
对比DeepSDF与MirrorNet,实现单深度视图下的物体非可见表面3D重建
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 三维重建 深度学习 RGB-D相机 有符号距离场 视角变换
📋 核心要点
- 现有方法难以仅从单视角深度数据完整重建物体,尤其是在存在遮挡的情况下,这限制了机器人在复杂环境中的应用。
- 论文对比了DeepSDF和MirrorNet两种方法,DeepSDF预测有符号距离场,MirrorNet则通过视角转换生成图像以重建遮挡部分。
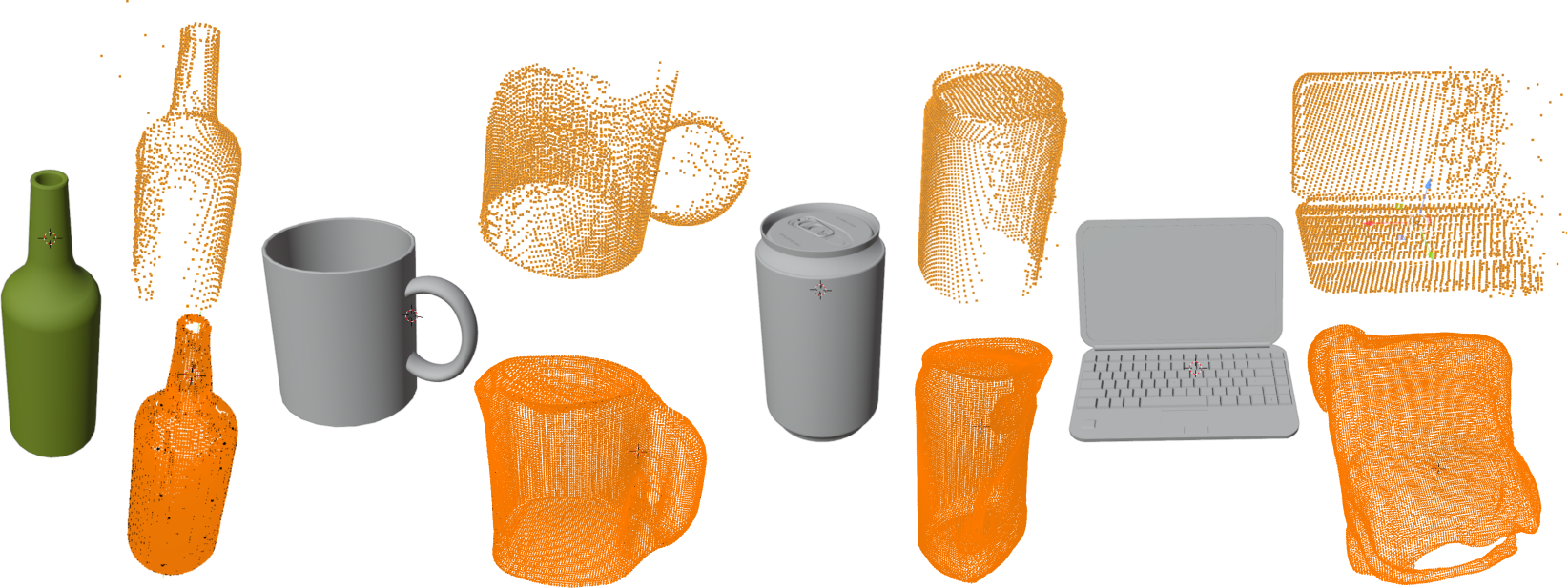
- 实验结果表明,MirrorNet在重建速度和精度上优于DeepSDF,尤其是在ShapeNet数据集上的物体重建任务中。
📝 摘要(中文)
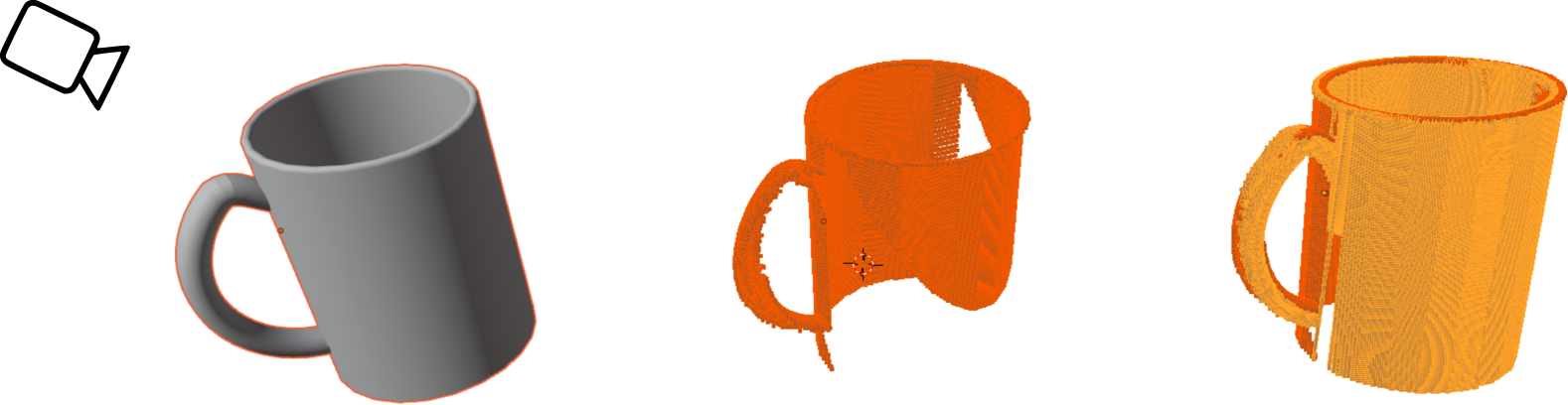
场景和物体重建是机器人学中的一个重要问题,尤其是在规划无碰撞轨迹或进行物体操作时。本文比较了两种从单个RGB-D相机视图重建物体表面非可见部分的方法。第一种方法名为DeepSDF,它预测给定3D空间点到物体表面的有符号距离变换。第二种方法名为MirrorNet,通过生成从观察物体另一侧看到的图像来重建被遮挡的物体部分。使用ShapeNet数据集中的物体进行的实验表明,依赖于视角的MirrorNet在大多数类别中速度更快,并且具有更小的重建误差。
🔬 方法详解
问题定义:论文旨在解决单视角深度图像下物体非可见表面的三维重建问题。现有方法在处理遮挡和视角局限性时表现不佳,导致重建结果不完整或不准确。这对于依赖完整三维信息的机器人应用(如抓取、导航)构成挑战。
核心思路:论文的核心思路是比较两种不同的策略来推断物体被遮挡部分的几何形状。DeepSDF通过学习物体表面的有符号距离函数来隐式地表示三维形状,而MirrorNet则通过学习视角变换来显式地生成被遮挡部分的图像,从而实现重建。
技术框架:DeepSDF使用深度神经网络学习一个函数,该函数输入三维空间中的一个点,输出该点到物体表面的有符号距离。MirrorNet使用一个神经网络,输入是当前视角的图像,输出是从物体另一侧观察到的图像。然后,可以使用这些生成的图像来推断被遮挡部分的几何形状。整体流程包括数据预处理、模型训练和重建结果评估。
关键创新:MirrorNet的关键创新在于其视角依赖性,它通过学习从不同视角观察物体的外观变化来推断被遮挡部分的信息。与DeepSDF这种试图学习物体全局形状表示的方法不同,MirrorNet更侧重于利用视角信息来完成重建。
关键设计:DeepSDF的关键设计在于其损失函数,它需要确保预测的有符号距离与实际距离一致,并且在物体表面附近具有梯度。MirrorNet的关键设计在于其网络结构,通常采用编码器-解码器结构,编码器提取图像特征,解码器生成新的视角图像。损失函数通常包括像素级别的图像重建损失和感知损失,以保证生成图像的质量。
🖼️ 关键图片
📊 实验亮点
实验结果表明,MirrorNet在ShapeNet数据集上的物体重建任务中,在速度和精度上都优于DeepSDF。具体来说,MirrorNet在大多数物体类别中都实现了更低的重建误差,并且重建速度更快。这表明,对于单视角深度图像的物体重建任务,基于视角变换的方法可能更有效。
🎯 应用场景
该研究成果可应用于机器人抓取、场景理解、三维建模等领域。在机器人抓取中,可以帮助机器人理解物体的完整形状,从而规划更有效的抓取策略。在场景理解中,可以用于补全场景中被遮挡的物体,提高场景理解的完整性。在三维建模中,可以从单视角图像重建出完整的物体三维模型。
📄 摘要(原文)
Scene and object reconstruction is an important problem in robotics, in particular in planning collision-free trajectories or in object manipulation. This paper compares two strategies for the reconstruction of nonvisible parts of the object surface from a single RGB-D camera view. The first method, named DeepSDF predicts the Signed Distance Transform to the object surface for a given point in 3D space. The second method, named MirrorNet reconstructs the occluded objects' parts by generating images from the other side of the observed object. Experiments performed with objects from the ShapeNet dataset, show that the view-dependent MirrorNet is faster and has smaller reconstruction errors in most categories.