Underactuated dexterous robotic grasping with reconfigurable passive joints
作者: Marek Kopicki, Sainul Islam Ansary, Simone Tolomei, Franco Angelini, Manolo Garabini, Piotr Skrzypczyński
分类: cs.RO
发布日期: 2025-01-27
期刊: IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 48-55, Jan. 2025
💡 一句话要点
提出可重构被动关节,实现欠驱动灵巧机械手的单样本学习抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 欠驱动机械手 灵巧抓取 可重构关节 单样本学习 运动感觉优化 机器人操作 被动关节
📋 核心要点
- 欠驱动机械手在灵巧操作中面临挑战,传统方法难以兼顾轻量化、紧凑性和灵活性。
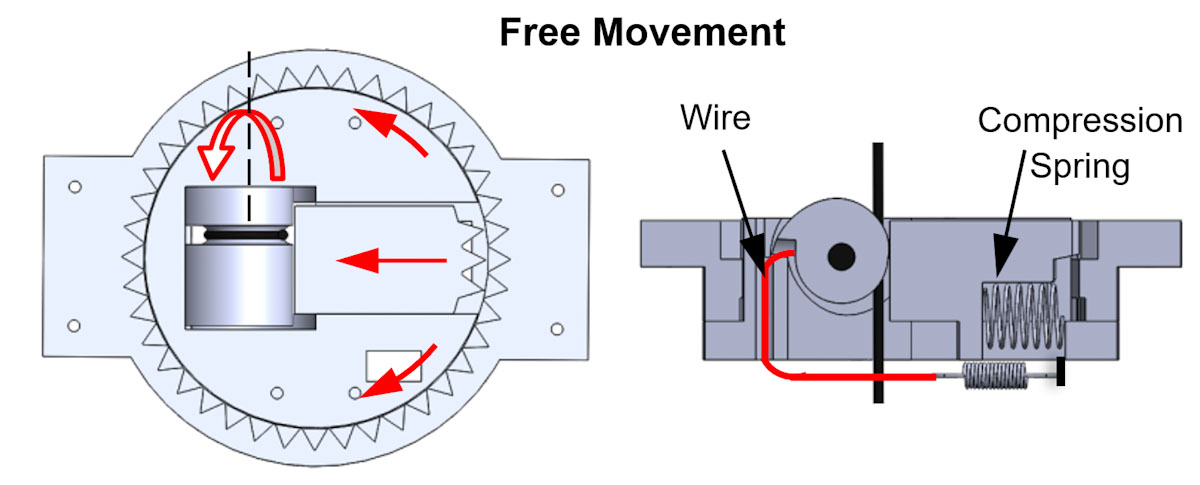
- 引入可重构被动关节(RP-joint),通过外部配置和张力锁定,实现灵活的抓取姿态调整。
- 结合单样本学习和运动感觉接触优化,提升欠驱动机械手的抓取成功率和灵巧操作能力。
📝 摘要(中文)
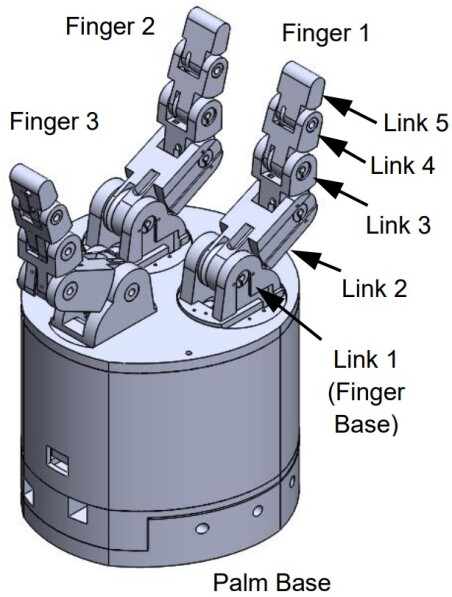
本文提出了一种新型的可重构被动关节(RP-joint),并在一个欠驱动三指机械手上进行了实现和测试。RP-joint没有驱动装置,但重量轻、结构紧凑。通过施加外力可以轻松地重新配置它,并在对连接的肌腱施加张力后锁定,以执行复杂的灵巧操作任务。此外,本文还提出了一种方法,该方法允许从欠驱动机械手的单个示例中学习灵巧抓取,并自动配置RP-joint以进行灵巧操作。通过集成运动感觉接触优化,进一步提高了抓取性能。所提出的RP-joint机械手和抓取规划器已经在42个宜家物品和YCB对象数据集上执行的超过370次抓取中进行了测试,在宜家和YCB上的抓取成功率分别为80%和87%。
🔬 方法详解
问题定义:欠驱动机械手通常难以实现复杂的灵巧操作,因为其自由度有限。现有的解决方案可能需要复杂的控制算法或额外的驱动装置,导致机械手体积增大、重量增加,并且控制复杂度提升。本文旨在解决欠驱动机械手在灵巧抓取和操作方面的局限性,使其能够在无需复杂控制和额外驱动的情况下,实现对不同形状和尺寸物体的稳定抓取和操作。
核心思路:本文的核心思路是引入可重构被动关节(RP-joint),该关节可以在外部力的作用下进行配置,并在施加张力后锁定。这种设计允许机械手在抓取前根据物体的形状和尺寸调整关节的姿态,从而实现更稳定的抓取。通过结合单样本学习和运动感觉接触优化,可以进一步提高抓取的成功率和操作的灵巧性。
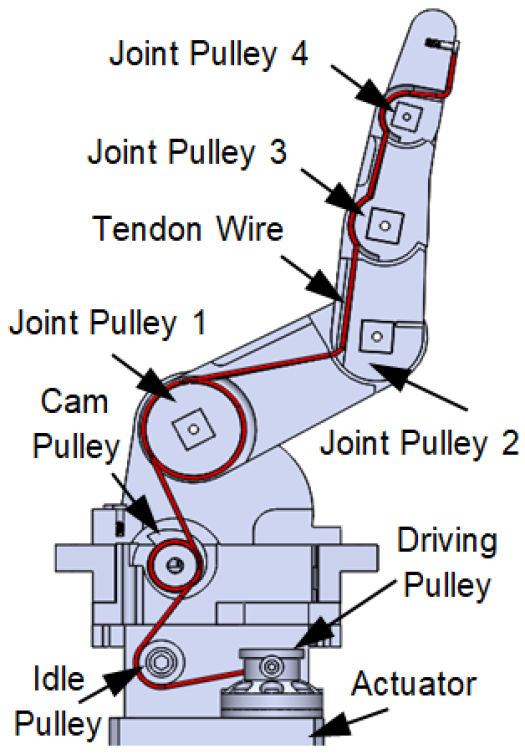
技术框架:该方法的技术框架主要包括以下几个阶段:1) RP-joint的设计和制造:设计一种轻量化、紧凑型的RP-joint,使其能够通过外部力进行配置和锁定。2) 单样本学习:利用单个抓取示例学习抓取策略,并自动配置RP-joint的姿态。3) 运动感觉接触优化:通过运动感觉反馈优化抓取姿态,提高抓取的稳定性和成功率。4) 实验验证:在真实的机械手上进行实验,验证所提出的RP-joint和抓取规划器的性能。
关键创新:本文的关键创新在于RP-joint的设计和应用。与传统的被动关节不同,RP-joint可以根据需要进行配置和锁定,从而提高了机械手的灵活性和适应性。此外,结合单样本学习和运动感觉接触优化,使得欠驱动机械手能够在无需大量训练数据的情况下,实现对不同物体的稳定抓取和灵巧操作。
关键设计:RP-joint的关键设计包括:1) 采用轻量化材料,如铝合金或塑料,以降低机械手的整体重量。2) 设计一种可靠的锁定机制,确保RP-joint在施加张力后能够稳定地保持其配置。3) 采用合适的肌腱和驱动机构,实现对RP-joint的精确控制。4) 在单样本学习中,采用合适的特征提取方法和机器学习算法,从单个抓取示例中学习抓取策略。5) 在运动感觉接触优化中,采用合适的力/力矩传感器和优化算法,提高抓取的稳定性和成功率。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的RP-joint机械手和抓取规划器在宜家物品和YCB对象数据集上分别实现了80%和87%的抓取成功率。这些结果表明,该方法能够有效地提高欠驱动机械手的抓取性能,并使其能够胜任各种复杂的抓取任务。与传统的欠驱动机械手相比,该方法在抓取成功率和操作灵巧性方面均有显著提升。
🎯 应用场景
该研究成果可应用于工业自动化、服务机器人、医疗康复等领域。例如,在工业自动化中,可用于抓取和操作不同形状和尺寸的零件;在服务机器人中,可用于帮助人们完成各种家务任务;在医疗康复中,可用于辅助患者进行康复训练。该研究的未来影响在于,它有望推动欠驱动机械手在实际应用中的普及,并为机器人技术的进一步发展提供新的思路。
📄 摘要(原文)
We introduce a novel reconfigurable passive joint (RP-joint), which has been implemented and tested on an underactuated three-finger robotic gripper. RP-joint has no actuation, but instead it is lightweight and compact. It can be easily reconfigured by applying external forces and locked to perform complex dexterous manipulation tasks, but only after tension is applied to the connected tendon. Additionally, we present an approach that allows learning dexterous grasps from single examples with underactuated grippers and automatically configures the RP-joints for dexterous manipulation. This is enhanced by integrating kinaesthetic contact optimization, which improves grasp performance even further. The proposed RP-joint gripper and grasp planner have been tested on over 370 grasps executed on 42 IKEA objects and on the YCB object dataset, achieving grasping success rates of 80% and 87%, on IKEA and YCB, respectively.