Think Small, Plan Smart: Minimalist Symbolic Abstraction and Heuristic Subspace Search for LLM-Guided Task Planning
作者: Junfeng Tang, Yuping Yan, Zihan Ye, Zhenshou, Song, Zeqi Zheng, Yaochu Jin
分类: cs.RO, cs.LG
发布日期: 2025-01-25 (更新: 2025-09-14)
💡 一句话要点
PLAHX:通过极简符号抽象和启发式子空间搜索提升LLM引导的任务规划能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 任务规划 大型语言模型 符号规划 抽象表示 启发式搜索 机器人 自主系统
📋 核心要点
- 现有LLM在任务规划中存在逻辑不一致和不可行输出的问题,且符号规划面临表示冗余和搜索空间爆炸的挑战。
- PLAHX通过极简符号抽象流程消除冗余,并结合元启发式子空间搜索,自适应地减少符号搜索空间。
- 实验表明,PLAHX在多个领域中成功率平均提高21.47%,token消耗减少13%,显著提升了规划效率和效果。
📝 摘要(中文)
在现实世界机器人系统中,可靠的任务规划对于实现长期自主至关重要。大型语言模型(LLM)为将复杂且模糊的自然语言指令转换为可执行计划提供了一个有前景的接口。然而,LLM的概率性和不透明性通常导致逻辑不一致或不可行的输出。为了解决这些限制,最近的框架将LLM与符号规划器结合,首先生成动作模型(规划领域定义语言),然后应用启发式搜索。尽管前景广阔,但此类系统仍然存在表示冗余和指数级搜索复杂性的问题,通常导致效率低下或计划过长。为了提高规划效率和有效性,我们提出了PLAHX(Planning from Language using Abstraction and Heuristic eXploration),这是一个两阶段的LLM-符号规划框架,它以并行和迭代的方式集成了抽象符号表示与元启发式子空间搜索。我们的方法没有依赖LLM生成的冗长领域模型,而是引入了一个极简的符号抽象流程,该流程在消除冗余的同时保留了语义保真度。我们的方法通过自适应地减少符号搜索空间来重新定义LLM-符号规划,而不是使LLM更智能。在包括块堆叠和机器人移动抓取在内的四个具有挑战性的领域中的经验结果表明,与最先进的基线相比,我们的方法平均提高了21.47%的成功率,同时减少了13%的token消耗。
🔬 方法详解
问题定义:论文旨在解决LLM引导的任务规划中,由于LLM输出的不可靠性和符号规划的搜索空间爆炸问题导致的规划效率低下和效果不佳的难题。现有方法依赖于LLM生成冗长的领域模型,导致表示冗余和搜索复杂性增加,限制了其在复杂任务中的应用。
核心思路:论文的核心思路是通过引入极简符号抽象流程来减少搜索空间,并结合元启发式子空间搜索来提高规划效率。这种方法不是试图让LLM更智能,而是通过优化符号表示和搜索策略来提升整体性能。
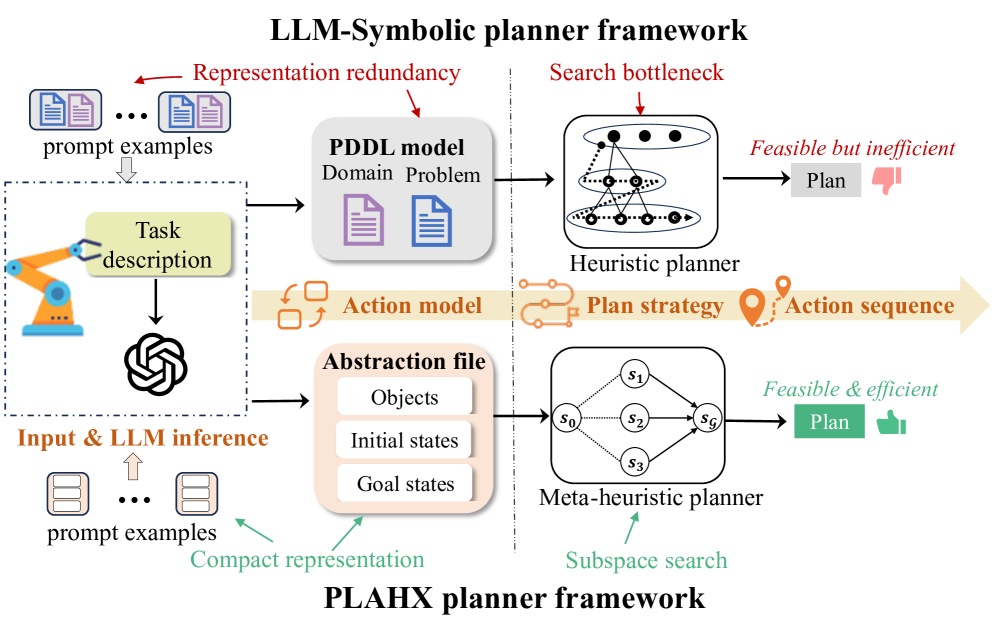
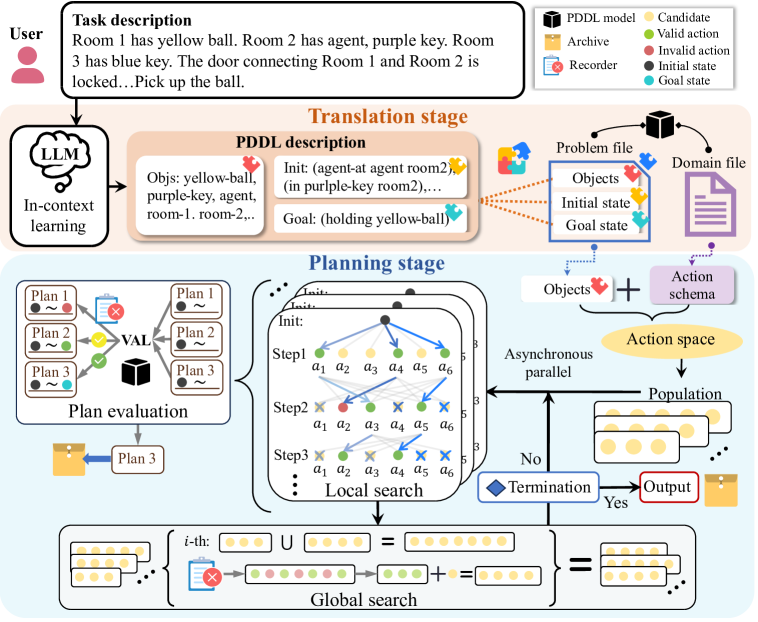
技术框架:PLAHX是一个两阶段的LLM-符号规划框架。第一阶段是极简符号抽象,利用LLM生成初始的动作模型,然后通过抽象流程消除冗余信息,生成精简的符号表示。第二阶段是启发式子空间搜索,在抽象的符号空间中进行高效搜索,找到可行的任务计划。这两个阶段以并行和迭代的方式进行,不断优化计划的质量和效率。
关键创新:论文的关键创新在于提出了极简符号抽象流程,该流程能够在保留语义保真度的前提下,显著减少符号表示的冗余。此外,结合元启发式子空间搜索,能够在缩小的搜索空间中快速找到最优或近似最优的计划。
关键设计:极简符号抽象流程的具体实现细节未知,但其核心目标是消除不必要的动作和状态变量,从而减少搜索空间。元启发式子空间搜索的具体算法也未知,但其目标是在抽象空间中高效地探索可能的计划,并利用启发式信息指导搜索方向。
🖼️ 关键图片
📊 实验亮点
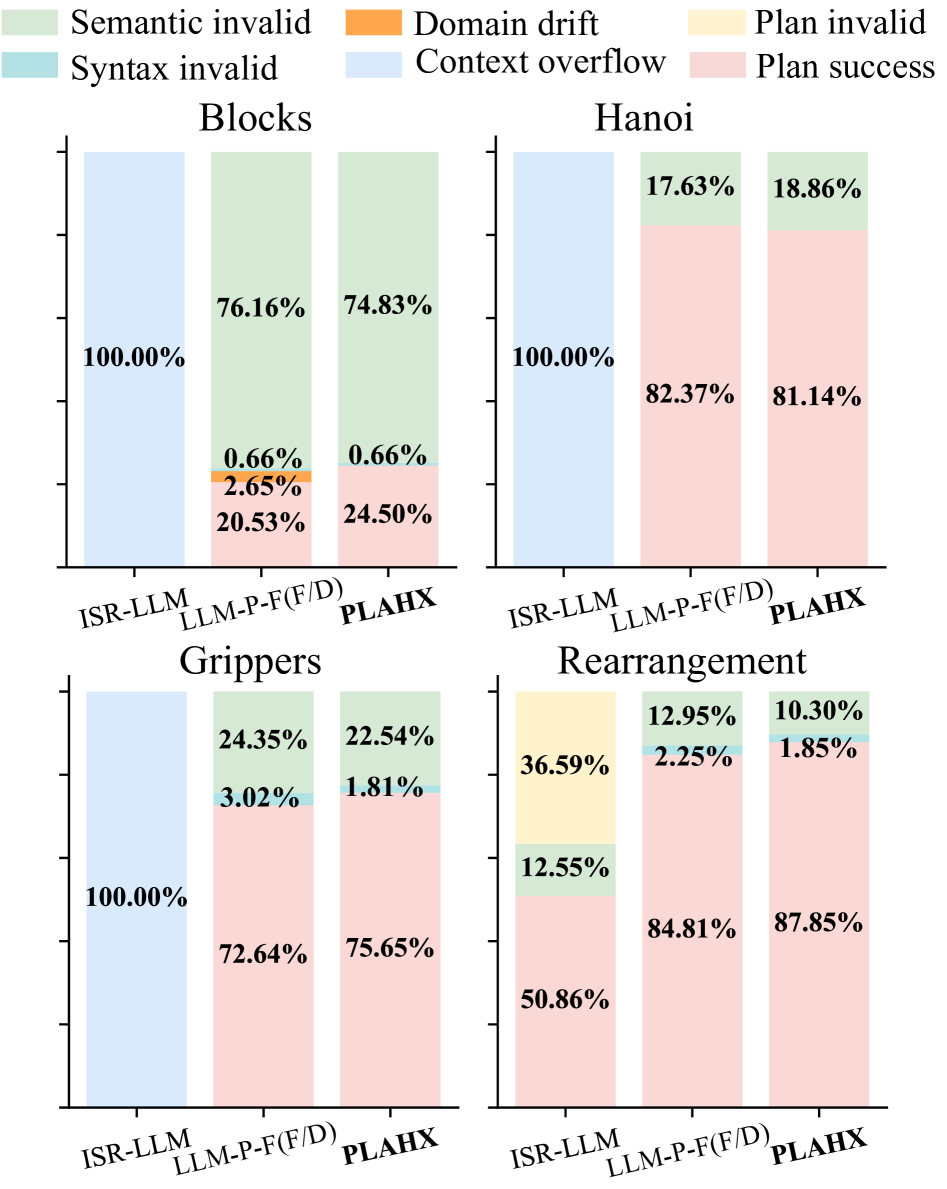
实验结果表明,PLAHX在块堆叠和机器人移动抓取等四个具有挑战性的领域中,与最先进的基线方法相比,平均提高了21.47%的成功率,同时减少了13%的token消耗。这表明PLAHX在提高规划效率和效果方面具有显著优势。
🎯 应用场景
该研究成果可广泛应用于机器人自主导航、智能制造、自动化流程设计等领域。通过将自然语言指令转化为可执行的任务计划,PLAHX能够帮助机器人更好地理解人类意图,并自主完成复杂任务,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Reliable task planning is pivotal for achieving long-horizon autonomy in real-world robotic systems. Large language models (LLMs) offer a promising interface for translating complex and ambiguous natural language instructions into actionable plans. However, their probabilistic and opaque nature often leads to logically inconsistent or infeasible outputs. To address these limitations, recent frameworks combine LLMs with symbolic planners by first generating action models (Planning Domain Definition Language) and then applying heuristic search. Although promising, such systems still suffer from representation redundancy and exponential search complexity, often resulting in inefficient or overly long plans. To improve planning efficiency and effectiveness, we propose PLAHX (Planning from Language using Abstraction and Heuristic eXploration), a two-stage LLM-symbolic planning framework that integrates abstract symbolic representations with meta-heuristic subspace search in a parallel and iterative fashion. Rather than relying on verbose LLM-generated domain models, we introduce a minimalist symbolic abstraction pipeline that preserves semantic fidelity while eliminating redundancy. Our approach redefines LLM-symbolic planning not by making LLMs smarter, but by reducing the symbolic search space adaptively. Empirical results across four challenging domains, including block stacking and robotic mobile grasping, show that our approach improves the success rate by 21.47% on average, while reducing token consumption by 13% compared to state-of-the-art baselines.