VIGS SLAM: IMU-based Large-Scale 3D Gaussian Splatting SLAM
作者: Gyuhyeon Pak, Euntai Kim
分类: cs.RO, cs.CV, cs.LG
发布日期: 2025-01-23
备注: 7 pages, 5 figures
💡 一句话要点
VIGS SLAM:基于IMU的大规模3D高斯溅射SLAM
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 3D高斯溅射 IMU融合 大规模场景 RGB-D 室内环境 ICP 姿态估计
📋 核心要点
- 现有基于3D高斯溅射和NeRF的SLAM方法,虽然渲染效果好,但在大规模场景下计算量巨大,难以应用。
- VIGS SLAM融合RGB-D和IMU数据,利用IMU预积分提供ICP跟踪的良好初始值,降低了3DGS跟踪的计算负担。
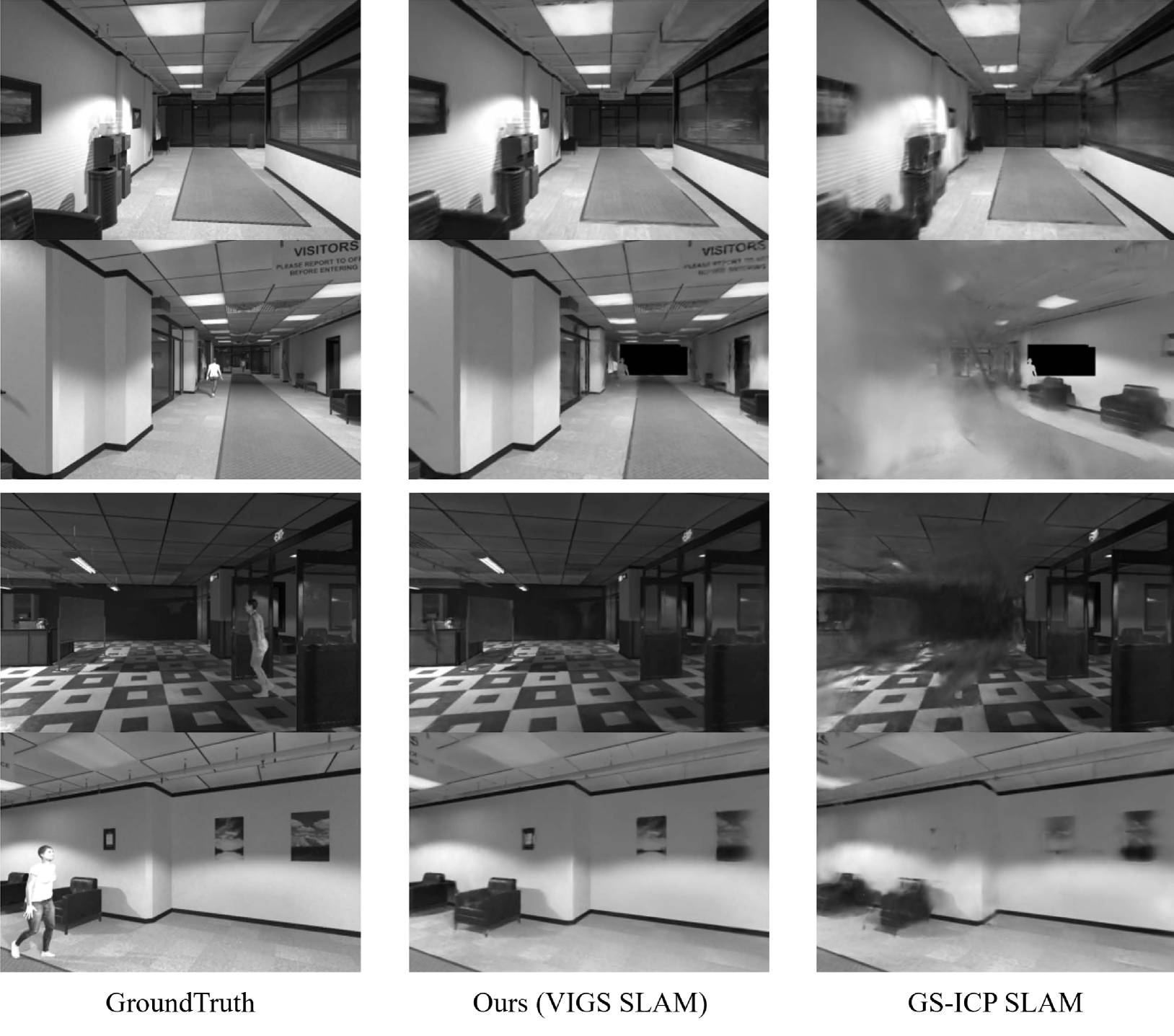
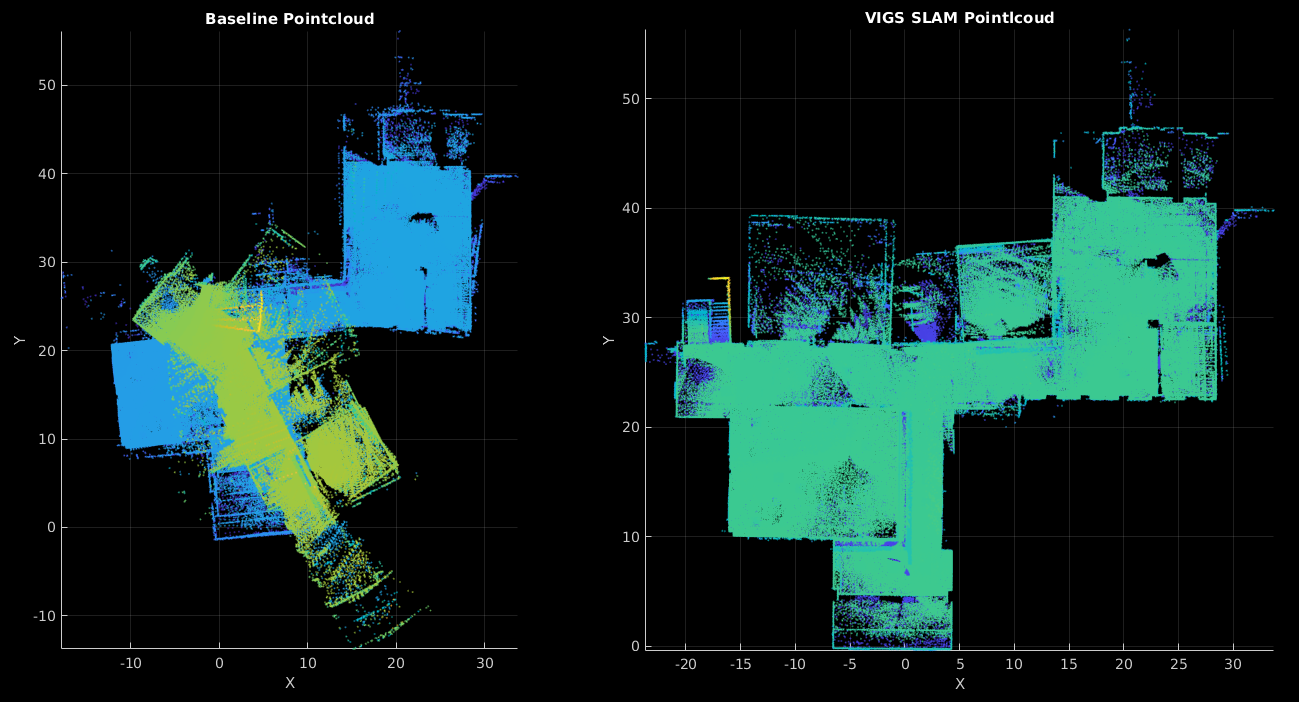
- 实验结果表明,VIGS SLAM能够在大规模室内环境中实现与SOTA方法相当的SLAM性能,扩展了高斯溅射SLAM的应用范围。
📝 摘要(中文)
本文提出了一种新的3D高斯溅射SLAM方法,即VIGS SLAM,它利用RGB-D和IMU传感器的融合,适用于大规模室内环境。为了降低基于3DGS的跟踪的计算负担,我们采用了一种基于ICP的跟踪框架,该框架结合了IMU预积分,为精确的姿态估计提供良好的初始猜测。我们提出的方法首次提出,通过集成IMU传感器测量,可以有效地在大规模环境中执行基于高斯溅射的SLAM。该方案不仅增强了高斯溅射SLAM在超出房间尺度的场景中的性能,而且在大规模室内环境中实现了与最先进方法相当的SLAM性能。
🔬 方法详解
问题定义:现有基于3D高斯溅射的SLAM方法,虽然在渲染质量上表现出色,但由于需要大量的Gaussian图像进行地图构建,并且需要相邻图像作为关键帧进行跟踪,因此在大规模场景下的计算量非常大,难以实现实时SLAM。这限制了它们在大型室内环境中的应用。
核心思路:VIGS SLAM的核心思路是通过融合IMU数据来降低3D高斯溅射SLAM的计算复杂度,并提高跟踪的准确性和鲁棒性。具体来说,利用IMU预积分提供一个良好的初始姿态估计,从而加速ICP的收敛,减少对相邻关键帧的依赖。
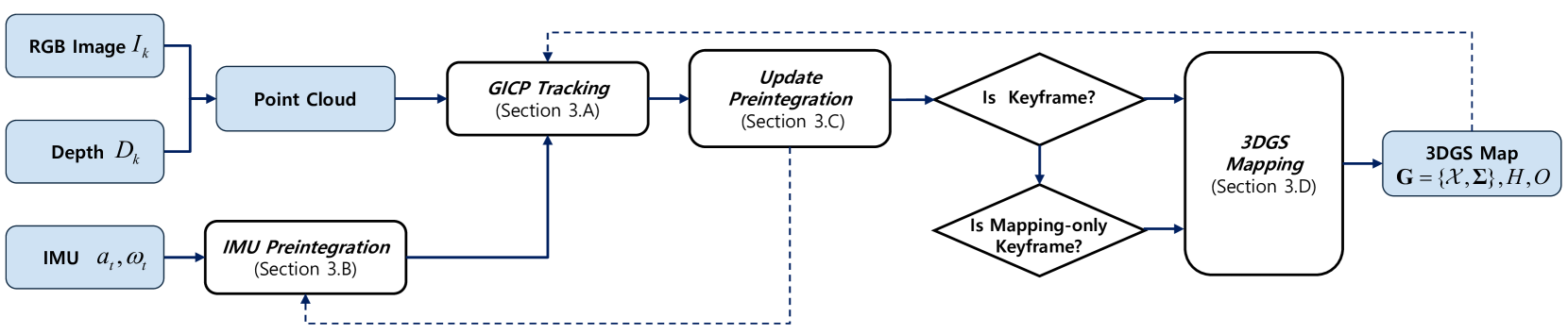
技术框架:VIGS SLAM的整体框架包含以下几个主要模块:1) RGB-D图像获取;2) IMU数据获取;3) IMU预积分,用于提供初始姿态估计;4) 基于ICP的跟踪,利用IMU预积分结果作为初始值;5) 3D高斯溅射地图构建与优化。该框架首先利用IMU预积分获得相机姿态的初步估计,然后使用ICP算法对RGB-D图像进行精细的姿态调整,最后将调整后的姿态用于3D高斯溅射地图的构建和优化。
关键创新:VIGS SLAM的关键创新在于将IMU数据融合到3D高斯溅射SLAM框架中。这是首次尝试将IMU传感器测量集成到基于高斯溅射的SLAM中,从而实现了在大规模环境中有效执行SLAM。与现有方法相比,VIGS SLAM降低了对关键帧的依赖,减少了计算量,并提高了跟踪的鲁棒性。
关键设计:VIGS SLAM的关键设计包括:1) 使用IMU预积分来提供ICP跟踪的初始姿态估计,减少了ICP的搜索空间;2) 采用高效的ICP算法,以实现快速准确的姿态估计;3) 对3D高斯溅射地图进行优化,以提高地图的质量和精度。具体的参数设置和损失函数细节在论文中未明确给出,属于未知信息。
🖼️ 关键图片
📊 实验亮点
VIGS SLAM通过融合IMU数据,成功地将3D高斯溅射SLAM扩展到大规模室内环境。实验结果表明,VIGS SLAM在大规模场景中实现了与最先进方法相当的SLAM性能,证明了IMU融合对于提高高斯溅射SLAM性能的有效性。具体的性能数据和对比基线在摘要中未给出,属于未知信息。
🎯 应用场景
VIGS SLAM具有广泛的应用前景,例如室内机器人导航、增强现实、虚拟现实、三维重建等。该方法能够构建高质量、大规模的3D地图,为机器人提供准确的环境感知,并为用户提供沉浸式的视觉体验。未来,VIGS SLAM有望应用于智能家居、智慧城市等领域。
📄 摘要(原文)
Recently, map representations based on radiance fields such as 3D Gaussian Splatting and NeRF, which excellent for realistic depiction, have attracted considerable attention, leading to attempts to combine them with SLAM. While these approaches can build highly realistic maps, large-scale SLAM still remains a challenge because they require a large number of Gaussian images for mapping and adjacent images as keyframes for tracking. We propose a novel 3D Gaussian Splatting SLAM method, VIGS SLAM, that utilizes sensor fusion of RGB-D and IMU sensors for large-scale indoor environments. To reduce the computational load of 3DGS-based tracking, we adopt an ICP-based tracking framework that combines IMU preintegration to provide a good initial guess for accurate pose estimation. Our proposed method is the first to propose that Gaussian Splatting-based SLAM can be effectively performed in large-scale environments by integrating IMU sensor measurements. This proposal not only enhances the performance of Gaussian Splatting SLAM beyond room-scale scenarios but also achieves SLAM performance comparable to state-of-the-art methods in large-scale indoor environments.