A 3-Step Optimization Framework with Hybrid Models for a Humanoid Robot's Jump Motion
作者: Haoxiang Qi, Zhangguo Yu, Xuechao Chen, Yaliang Liu, Chuanku Yi, Chencheng Dong, Fei Meng, Qiang Huang
分类: cs.RO
发布日期: 2025-01-22
DOI: 10.1109/TASE.2025.3557162
💡 一句话要点
提出基于混合模型的3步优化框架,用于人形机器人跳跃运动轨迹生成。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 跳跃运动 轨迹优化 混合模型 二次规划
📋 核心要点
- 人形机器人实现高动态跳跃运动以适应环境和跨越障碍物是一项挑战,现有的轨迹优化方法存在迭代速度慢和性能不佳的问题。
- 本文提出了一种三步轨迹优化框架,通过混合模型和分阶段优化,兼顾了计算效率和运动性能。
- 通过仿真和实验验证,该框架能够生成人形机器人1.0米距离和0.5米高度的前向跳跃运动轨迹,证明了其有效性。
📝 摘要(中文)
本文提出了一种三步轨迹优化框架,用于生成人形机器人的跳跃运动。该框架包含三个子优化步骤,旨在提高迭代速度并实现理想的性能。第一步优化结合了动量、惯性和压力中心(CoP),将机器人视为静态反作用力矩摆(SRMP)模型,以生成相应的轨迹。第二步优化使用有效的二次规划(QP)求解器将这些轨迹映射到关节空间。最后,第三步优化利用前两步生成的轨迹,生成全身关节轨迹。通过综合考虑动量和惯性,机器人实现了敏捷的前向跳跃运动。本文展示了1.0米距离和0.5米高度的前向跳跃仿真和实验,验证了所提出框架的适用性。
🔬 方法详解
问题定义:人形机器人实现高动态跳跃运动需要精确的轨迹控制。现有的轨迹优化方法通常计算复杂度高,迭代速度慢,难以满足实时性要求,并且难以同时兼顾运动的稳定性和敏捷性。
核心思路:本文的核心思路是将复杂的跳跃运动轨迹优化问题分解为三个子优化问题,每个子问题采用不同的模型和优化方法,从而降低计算复杂度,提高优化效率。通过分阶段优化,逐步生成满足要求的全身关节轨迹。
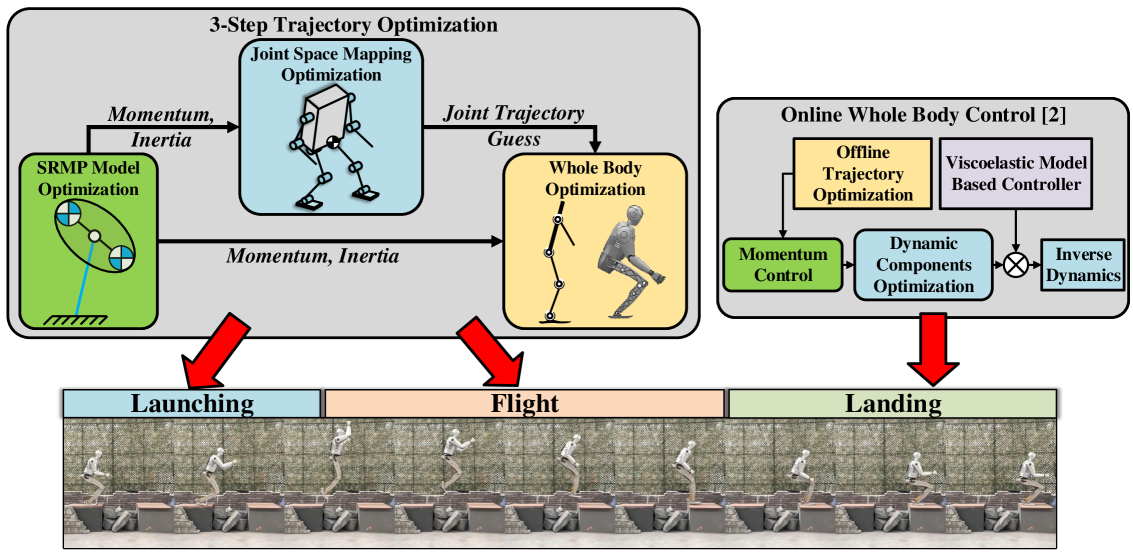
技术框架:该框架包含三个主要步骤: 1. SRMP模型优化:将机器人简化为静态反作用力矩摆(SRMP)模型,结合动量、惯性和压力中心(CoP)约束,生成粗略的轨迹。 2. 关节空间映射:使用二次规划(QP)求解器将SRMP模型生成的轨迹映射到关节空间,得到关节轨迹的初步估计。 3. 全身轨迹优化:利用前两步生成的轨迹作为初始值,进行全身轨迹优化,生成最终的关节轨迹。
关键创新:该方法的主要创新在于: 1. 混合模型:结合了SRMP模型和全身动力学模型,在保证计算效率的同时,兼顾了运动的精度。 2. 三步优化框架:将复杂的优化问题分解为三个子问题,降低了计算复杂度,提高了优化效率。 3. 动量和惯性综合考虑:在优化过程中综合考虑了动量和惯性,提高了运动的稳定性和敏捷性。
关键设计: 1. SRMP模型参数:需要根据机器人的质量、重心位置等参数进行调整。 2. QP求解器选择:选择合适的QP求解器对关节空间映射的效率至关重要。 3. 全身轨迹优化目标函数:需要设计合适的损失函数,以保证运动的平滑性、稳定性和能量效率。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该框架能够成功生成人形机器人1.0米距离和0.5米高度的前向跳跃运动轨迹。仿真和实验验证了该框架的有效性和可行性。虽然论文中没有给出与其它算法的量化对比,但实验结果表明该方法能够实现较为理想的跳跃运动。
🎯 应用场景
该研究成果可应用于人形机器人在复杂环境中的运动控制,例如在崎岖地形上的行走、跨越障碍物、以及进行救援任务等。通过优化跳跃运动轨迹,可以提高机器人的运动能力和适应性,使其能够更好地完成各种任务。此外,该方法也可以推广到其他类型机器人的运动控制中。
📄 摘要(原文)
High dynamic jump motions are challenging tasks for humanoid robots to achieve environment adaptation and obstacle crossing. The trajectory optimization is a practical method to achieve high-dynamic and explosive jumping. This paper proposes a 3-step trajectory optimization framework for generating a jump motion for a humanoid robot. To improve iteration speed and achieve ideal performance, the framework comprises three sub-optimizations. The first optimization incorporates momentum, inertia, and center of pressure (CoP), treating the robot as a static reaction momentum pendulum (SRMP) model to generate corresponding trajectories. The second optimization maps these trajectories to joint space using effective Quadratic Programming (QP) solvers. Finally, the third optimization generates whole-body joint trajectories utilizing trajectories generated by previous parts. With the combined consideration of momentum and inertia, the robot achieves agile forward jump motions. A simulation and experiments (Fig. \ref{Fig First page fig}) of forward jump with a distance of 1.0 m and 0.5 m height are presented in this paper, validating the applicability of the proposed framework.