Online Hybrid-Belief POMDP with Coupled Semantic-Geometric Models
作者: Tuvy Lemberg, Vadim Indelman
分类: cs.RO
发布日期: 2025-01-20 (更新: 2025-10-08)
备注: 20 pages, 9 figures
💡 一句话要点
提出耦合语义-几何模型的在线混合信念POMDP,解决复杂环境下的机器人规划问题
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人规划 POMDP 混合信念 语义几何建模 不确定性推理
📋 核心要点
- 现有方法难以处理复杂环境中机器人规划时,语义和几何信息耦合导致的语义状态空间维度指数增长问题。
- 论文提出一种新颖的混合信念形式,并利用它来采样代表性样本,从而在POMDP框架下进行规划。
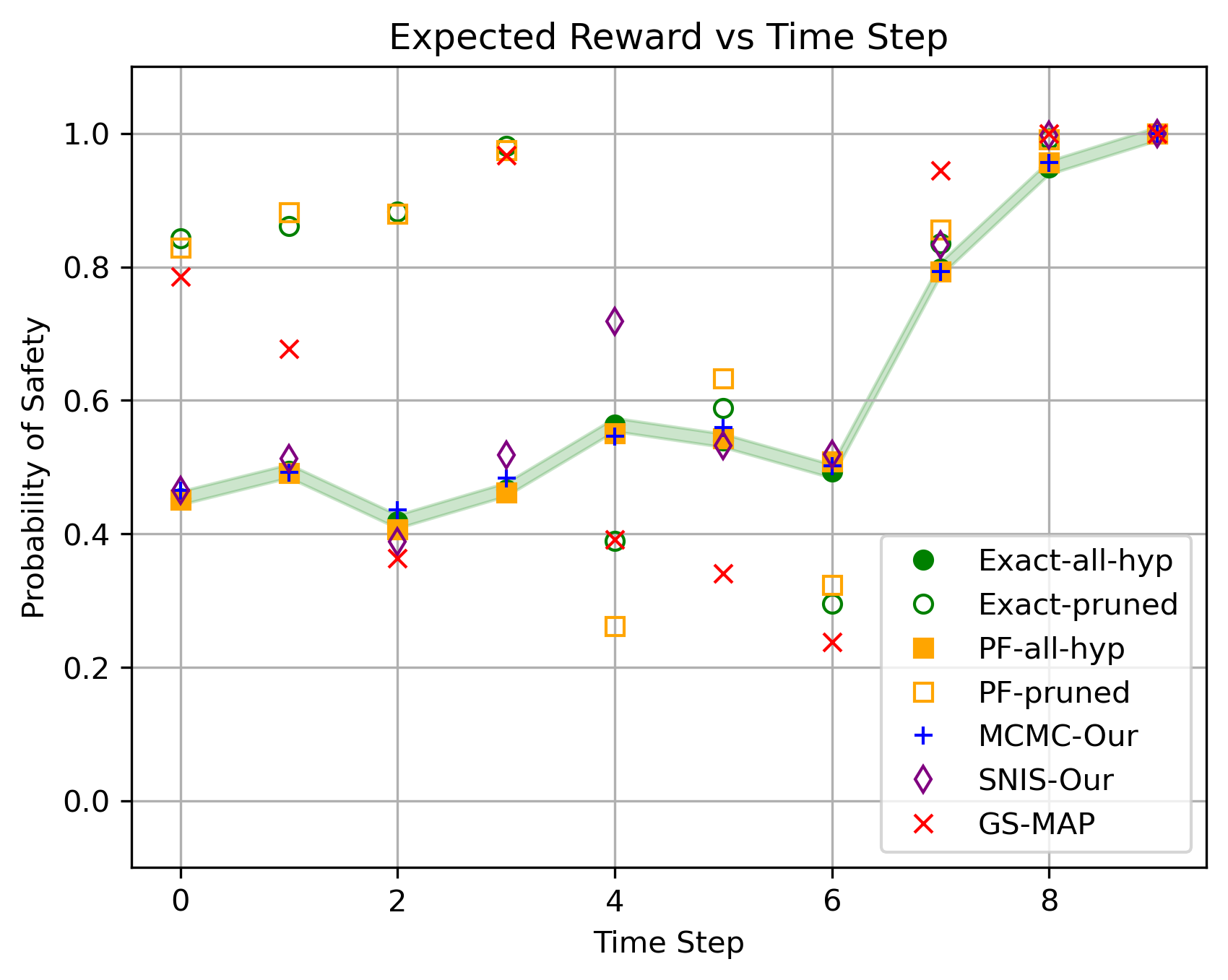
- 仿真结果表明,该方法在目标函数和安全概率估计方面,能达到与穷举方法相似的精度,但复杂度从指数级降为多项式级。
📝 摘要(中文)
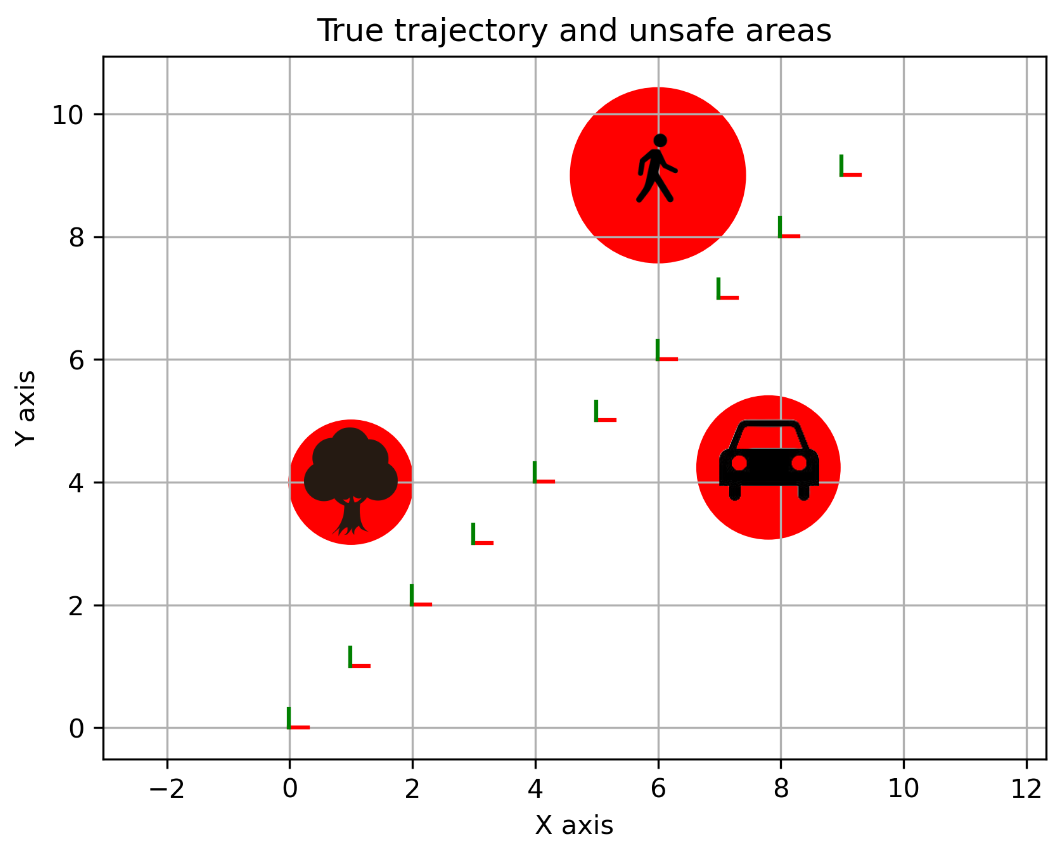
本文提出了一种用于在复杂未知环境中运行的机器人的规划方法,该方法利用耦合的语义-几何模型。机器人需要环境的几何-语义表示来安全地执行任务。在推断环境时,必须考虑许多可能的场景来规划未来的行动。由于对象的类别是离散的,而机器人自身姿态和对象姿态是连续的,因此环境可以用混合离散-连续信念来表示,该信念根据模型和传入的数据进行更新。先验概率和表示环境的观测模型可以使用深度学习算法从数据中学习。这些模型通常耦合环境的语义和几何属性。因此,语义变量相互关联,导致语义状态空间维度呈指数增长。本文考虑使用具有混合语义-几何信念的部分可观察马尔可夫决策过程(POMDP)进行不确定性下的规划。模型和先验考虑了语义和几何变量之间的耦合。在POMDP中,引入了语义感知的安全概念。获得理论混合信念的代表性样本对于估计值函数非常具有挑战性。作为一项关键贡献,我们开发了一种新形式的混合信念,并利用它来采样代表性样本。我们表明,在某些条件下,可以通过对所有可能的语义映射进行显式期望来有效地计算值函数和安全概率。仿真结果表明,与使用来自理论混合信念的样本在整个语义状态空间上穷举运行的估计器相比,我们的目标函数和安全概率估计器达到了相似的精度水平。然而,我们的估计器的复杂度是多项式的,而不是指数的。
🔬 方法详解
问题定义:论文旨在解决在复杂和未知环境中运行的机器人,如何利用环境的语义和几何信息进行安全规划的问题。现有方法的主要痛点在于,当环境的语义和几何属性耦合时,语义状态空间的维度会呈指数级增长,导致规划的计算复杂度过高,难以实时应用。
核心思路:论文的核心思路是利用一种新颖的混合信念表示方法,该方法能够有效地捕捉语义和几何变量之间的耦合关系,并允许从中采样出具有代表性的样本。通过这种方式,可以在不显式枚举整个语义状态空间的情况下,近似计算值函数和安全概率,从而降低计算复杂度。
技术框架:整体框架基于部分可观察马尔可夫决策过程(POMDP)。主要包含以下几个阶段:1) 使用深度学习算法从数据中学习环境的先验概率和观测模型,这些模型考虑了语义和几何属性的耦合。2) 构建混合语义-几何信念,用于表示机器人对环境状态的不确定性。3) 利用提出的新颖混合信念形式,采样代表性样本。4) 在POMDP框架下,使用采样得到的样本,计算值函数和安全概率,并进行规划。
关键创新:最重要的技术创新点在于提出了新颖的混合信念表示方法,以及基于该表示方法的采样策略。与现有方法相比,该方法能够更有效地处理语义和几何变量之间的耦合关系,避免了对整个语义状态空间的穷举搜索,从而显著降低了计算复杂度。
关键设计:论文的关键设计包括:1) 混合信念的表示形式,具体形式未知,但强调了对语义和几何变量耦合关系的建模。2) 基于混合信念的采样策略,目标是获得具有代表性的样本,具体策略未知。3) 在POMDP框架下,如何利用采样得到的样本来近似计算值函数和安全概率,具体计算方法未知。
🖼️ 关键图片

📊 实验亮点
论文通过仿真实验验证了所提出方法的有效性。实验结果表明,与使用来自理论混合信念的样本在整个语义状态空间上穷举运行的估计器相比,该方法在目标函数和安全概率估计方面达到了相似的精度水平。更重要的是,该方法的计算复杂度是多项式的,而不是指数的,这使得其更适用于实际应用。
🎯 应用场景
该研究成果可应用于各种需要在复杂和未知环境中运行的机器人,例如自动驾驶汽车、服务机器人、搜索救援机器人等。通过利用环境的语义和几何信息,机器人可以更安全、更有效地执行任务,例如导航、物体识别、操作等。该研究的未来影响在于,可以推动机器人技术在更广泛的领域中的应用。
📄 摘要(原文)
Robots operating in complex and unknown environments frequently require geometric-semantic representations of the environment to safely perform their tasks. While inferring the environment, they must account for many possible scenarios when planning future actions. Since objects' class types are discrete and the robot's self-pose and the objects' poses are continuous, the environment can be represented by a hybrid discrete-continuous belief which is updated according to models and incoming data. Prior probabilities and observation models representing the environment can be learned from data using deep learning algorithms. Such models often couple environmental semantic and geometric properties. As a result, semantic variables are interconnected, causing semantic state space dimensionality to increase exponentially. In this paper, we consider planning under uncertainty using partially observable Markov decision processes (POMDPs) with hybrid semantic-geometric beliefs. The models and priors consider the coupling between semantic and geometric variables. Within POMDP, we introduce the concept of semantically aware safety. Obtaining representative samples of the theoretical hybrid belief, required for estimating the value function, is very challenging. As a key contribution, we develop a novel form of the hybrid belief and leverage it to sample representative samples. We show that under certain conditions, the value function and probability of safety can be calculated efficiently with an explicit expectation over all possible semantic mappings. Our simulations show that our estimates of the objective function and probability of safety achieve similar levels of accuracy compared to estimators that run exhaustively on the entire semantic state-space using samples from the theoretical hybrid belief. Nevertheless, the complexity of our estimators is polynomial rather than exponential.