CART-MPC: Coordinating Assistive Devices for Robot-Assisted Transferring with Multi-Agent Model Predictive Control
作者: Ruolin Ye, Shuaixing Chen, Yunting Yan, Joyce Yang, Christina Ge, Jose Barreiros, Kate Tsui, Tom Silver, Tapomayukh Bhattacharjee
分类: cs.RO
发布日期: 2025-01-19
💡 一句话要点
提出CART-MPC算法,协调机器人与辅助设备,实现重物转移任务中的吊索连接
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人辅助 多智能体控制 模型预测控制 可变形物体操作 重物转移
📋 核心要点
- 护理机器人转移重物受限于有效载荷,现有方法难以协调多种辅助设备。
- CART-MPC算法基于多智能体模型预测控制,协调机器人、吊索和轮椅,完成吊索连接任务。
- 实验表明,CART-MPC在模拟和真实环境中均表现出良好的泛化能力和零样本迁移能力。
📝 摘要(中文)
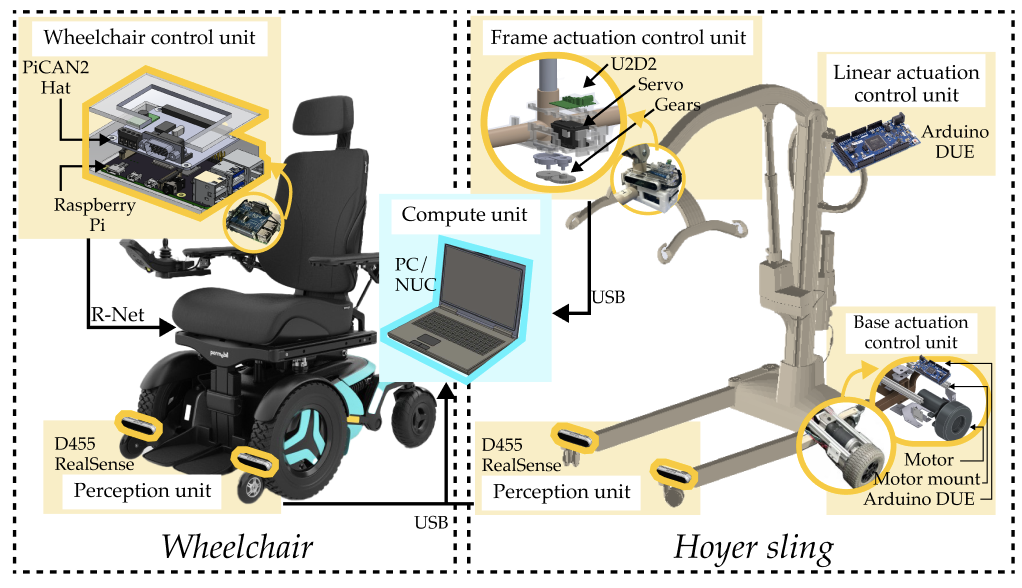
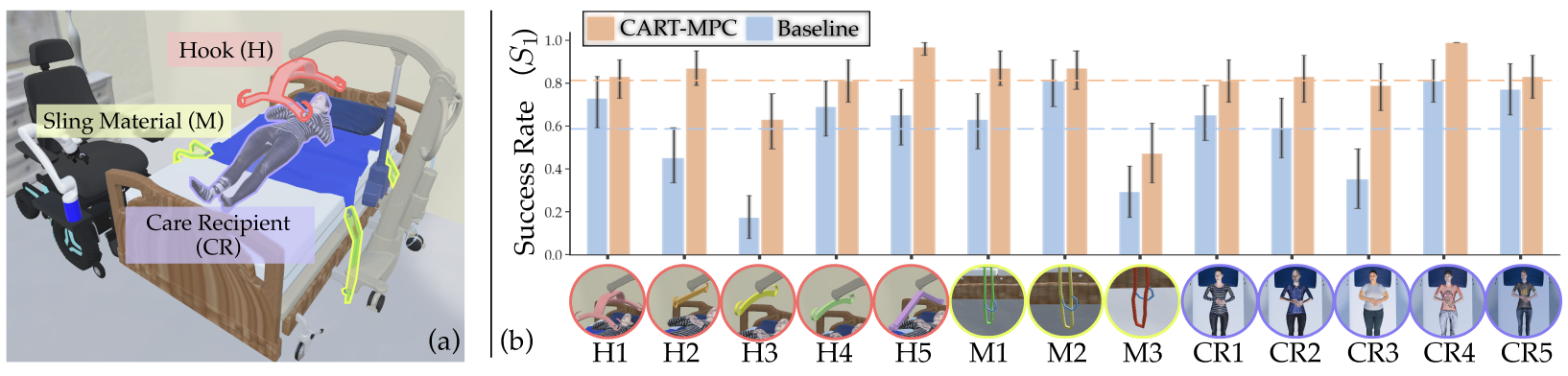
床到轮椅的转移是常见的日常生活活动(ADL),但对于有效载荷有限的护理机器人来说尤其具有挑战性。我们开发了一种新算法,利用其他辅助设备:Hoyer吊索和轮椅进行重物的大致操作,以及机器人手臂进行可变形物体(Hoyer吊索带)的精细操作。我们为Hoyer吊索和轮椅配备了执行器和传感器,使它们成为算法中的智能体。然后,我们专注于转移ADL的一个子任务——将Hoyer吊索带系在吊索杆上——这体现了转移的挑战:多智能体规划、可变形物体操作以及对不同挂钩形状、吊索材料和护理对象身体的泛化。为了应对这些挑战,我们提出CART-MPC,这是一种基于轮流多智能体模型预测控制的新算法,它使用学习的神经动力学模型来表示可变形Hoyer吊索带的关键点,以及一种利用来自结理论的链接数和神经摊销来加速推理的新型成本函数。我们在RCareWorld模拟和真实环境中验证了它。在模拟中,CART-MPC成功地推广到不同的挂钩设计、吊索材料和护理对象体型。在现实世界中,我们展示了零样本sim-to-real泛化能力,可以将可变形的Hoyer吊索带系在吊索杆上,以便将人体模型从医院病床转移到轮椅上。
🔬 方法详解
问题定义:论文旨在解决机器人辅助转移场景中,如何协调机器人与辅助设备(如Hoyer吊索和轮椅)以完成重物转移任务的问题。现有方法通常依赖于单个机器人完成所有操作,对于有效载荷有限的机器人来说,难以胜任。此外,可变形吊索带的操作也增加了任务的复杂性。
核心思路:论文的核心思路是将机器人、吊索和轮椅视为多个智能体,通过多智能体模型预测控制(MPC)进行协调规划。每个智能体负责特定的任务,例如机器人负责精细操作吊索带,吊索和轮椅负责重物的粗略移动。这种分工合作的方式可以有效降低单个机器人的负载,提高任务的成功率。
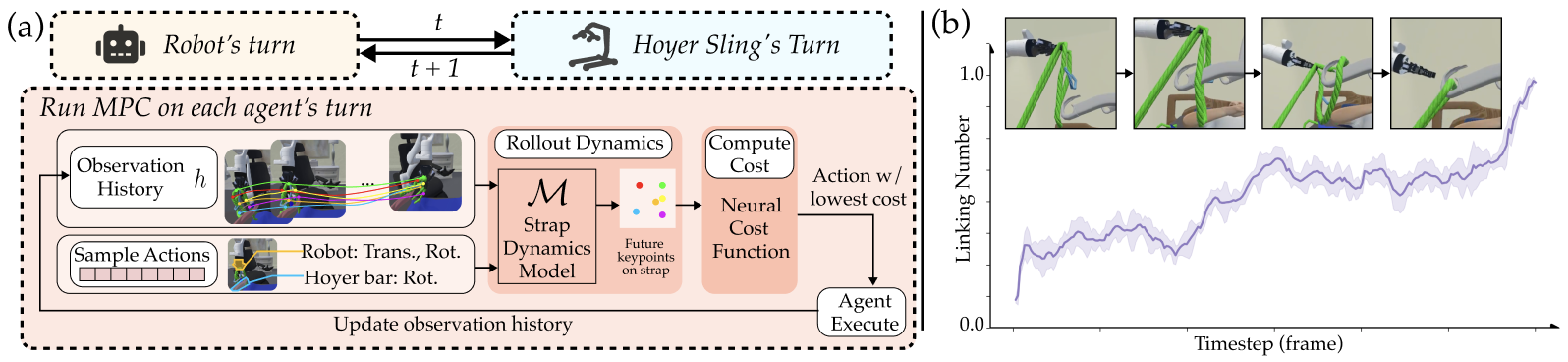
技术框架:CART-MPC算法的整体框架如下:1) 使用关键点表示可变形的Hoyer吊索带。2) 学习吊索带的神经动力学模型,用于预测吊索带在不同操作下的运动。3) 基于多智能体MPC进行规划,每个智能体根据自身的状态和目标,选择最优的动作序列。4) 使用一种新型的成本函数,该函数利用来自结理论的链接数和神经摊销来加速推理。
关键创新:论文的关键创新在于:1) 提出了一种基于多智能体MPC的协调控制框架,能够有效协调机器人与辅助设备。2) 使用学习的神经动力学模型来预测可变形吊索带的运动,提高了规划的准确性。3) 提出了一种新型的成本函数,利用链接数和神经摊销来加速推理,提高了规划的效率。
关键设计:在关键设计方面,论文使用了基于关键点的吊索带表示方法,并使用神经网络学习吊索带的动力学模型。成本函数的设计考虑了多个因素,包括吊索带与吊索杆的距离、吊索带的形状以及智能体之间的协作关系。此外,论文还使用了turn-taking的MPC策略,即每个智能体轮流进行规划,避免了多个智能体同时规划导致的计算复杂度过高的问题。
🖼️ 关键图片
📊 实验亮点
CART-MPC算法在模拟和真实环境中均取得了良好的效果。在模拟实验中,CART-MPC成功地泛化到不同的挂钩设计、吊索材料和护理对象体型。在真实实验中,CART-MPC展示了零样本sim-to-real泛化能力,能够将可变形的Hoyer吊索带系在吊索杆上,以便将人体模型从医院病床转移到轮椅上。
🎯 应用场景
该研究成果可应用于养老院、医院等场景,辅助护理人员进行重物转移,减轻护理人员的负担,提高护理效率和安全性。此外,该方法还可以推广到其他需要多智能体协作的机器人应用中,例如装配、搬运等。
📄 摘要(原文)
Bed-to-wheelchair transferring is a ubiquitous activity of daily living (ADL), but especially challenging for caregiving robots with limited payloads. We develop a novel algorithm that leverages the presence of other assistive devices: a Hoyer sling and a wheelchair for coarse manipulation of heavy loads, alongside a robot arm for fine-grained manipulation of deformable objects (Hoyer sling straps). We instrument the Hoyer sling and wheelchair with actuators and sensors so that they can become intelligent agents in the algorithm. We then focus on one subtask of the transferring ADL -- tying Hoyer sling straps to the sling bar -- that exemplifies the challenges of transfer: multi-agent planning, deformable object manipulation, and generalization to varying hook shapes, sling materials, and care recipient bodies. To address these challenges, we propose CART-MPC, a novel algorithm based on turn-taking multi-agent model predictive control that uses a learned neural dynamics model for a keypoint-based representation of the deformable Hoyer sling strap, and a novel cost function that leverages linking numbers from knot theory and neural amortization to accelerate inference. We validate it in both RCareWorld simulation and real-world environments. In simulation, CART-MPC successfully generalizes across diverse hook designs, sling materials, and care recipient body shapes. In the real world, we show zero-shot sim-to-real generalization capabilities to tie deformable Hoyer sling straps on a sling bar towards transferring a manikin from a hospital bed to a wheelchair. See our website for supplementary materials: https://emprise.cs.cornell.edu/cart-mpc/.