An Interpretable Neural Control Network with Adaptable Online Learning for Sample Efficient Robot Locomotion Learning
作者: Arthicha Srisuchinnawong, Poramate Manoonpong
分类: cs.RO, cs.LG
发布日期: 2025-01-18
备注: 20 pages, 11 Figures + 6 Figures in supplementary material section, 2 Tables, submitted to TNNLS (minor revision; revision submitted 5 October 2024)
DOI: 10.1109/TNNLS.2025.3552793
💡 一句话要点
提出SME-AGOL,解决机器人强化学习中样本效率低和黑盒性问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人运动控制 强化学习 样本效率 可解释性 神经网络 在线学习 六足机器人
📋 核心要点
- 强化学习在机器人运动控制中面临样本效率低和模型可解释性差的挑战,限制了其在实际机器人系统中的应用。
- 论文提出SME-AGOL算法,通过可解释的神经网络结构和自适应在线学习策略,提高样本利用率并增强模型的可理解性。
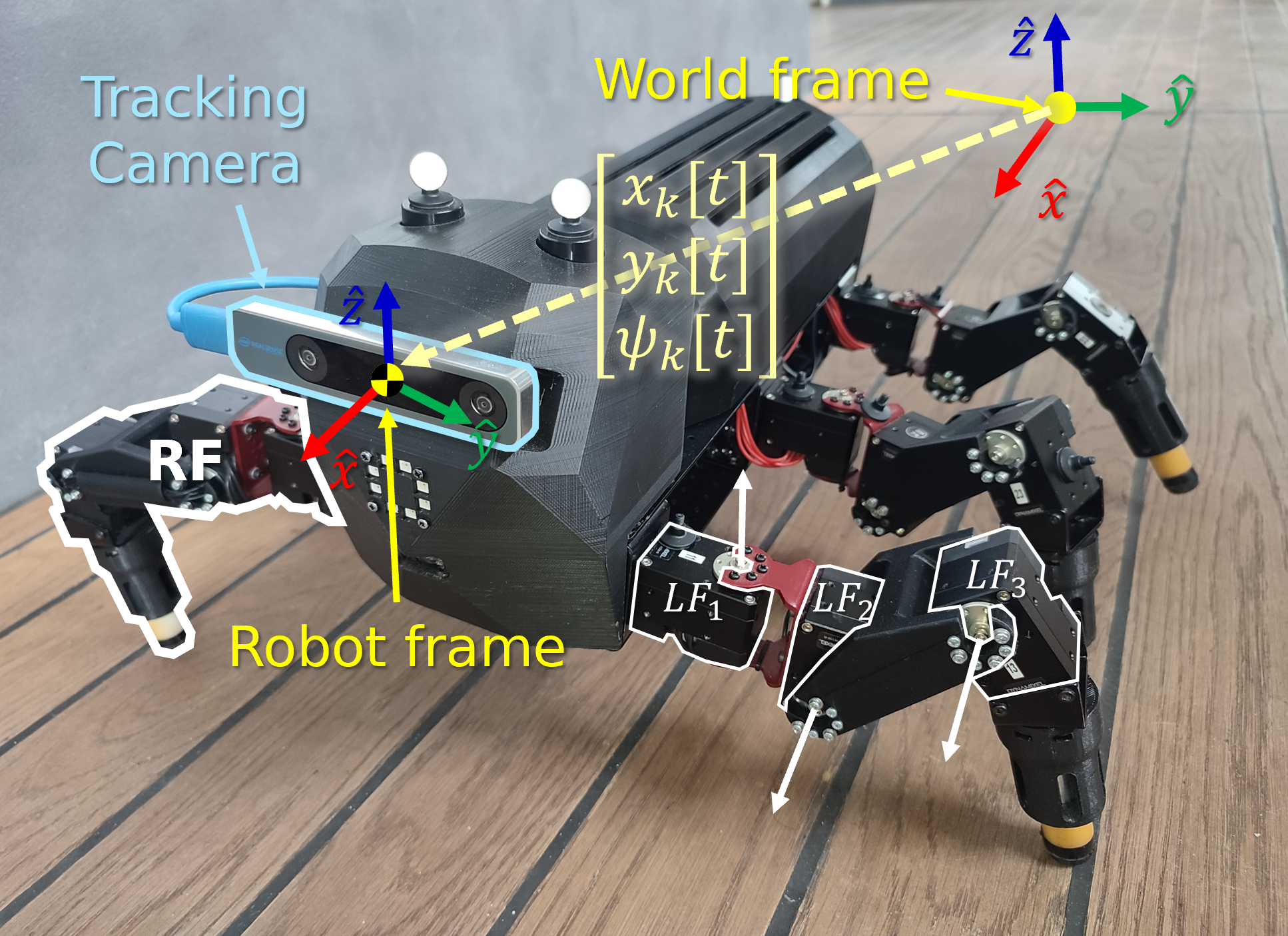
- 实验结果表明,SME-AGOL在六足机器人运动学习任务中,显著提高了样本效率和最终性能,并在真实机器人上实现了快速学习。
📝 摘要(中文)
本研究提出了一种新颖的SME-AGOL算法,旨在解决机器人强化学习中训练样本效率低下和缺乏可解释性的问题。该算法包含两个主要组成部分:顺序运动执行器(SME)是一个三层可解释神经网络,第一层生成顺序传播的隐藏状态,第二层构建相应的三角基函数且相邻干扰小,第三层将基函数映射到电机指令。自适应梯度加权在线学习(AGOL)算法优先更新相关性高的参数,使学习更专注于重要参数。SME-AGOL提供了一个可分析的框架,其中每个顺序隐藏状态/基函数代表学习到的关键姿势/机器人配置。实验表明,与现有方法相比,SME-AGOL在模拟六足机器人上所需的样本减少40%,最终奖励/运动性能提高150%,在物理六足机器人上仅需10分钟即可从头开始学习。这项工作不仅提出了用于样本高效且可理解的运动学习的SME-AGOL,还强调了可解释性在提高样本效率和学习性能方面的潜力。
🔬 方法详解
问题定义:现有基于强化学习的机器人运动控制方法,通常存在样本效率低和模型黑盒性问题。样本效率低意味着需要大量的训练数据才能获得较好的控制性能,这在真实机器人系统中是昂贵的。模型黑盒性使得难以理解学习到的控制策略,阻碍了模型的调试和改进。
核心思路:论文的核心思路是结合可解释的神经网络结构和自适应在线学习算法,从而提高样本效率并增强模型的可理解性。通过设计特定的网络结构,使得网络的中间层能够表示机器人的关键姿态,从而实现可解释性。通过自适应在线学习算法,使得模型能够快速适应新的数据,从而提高样本效率。
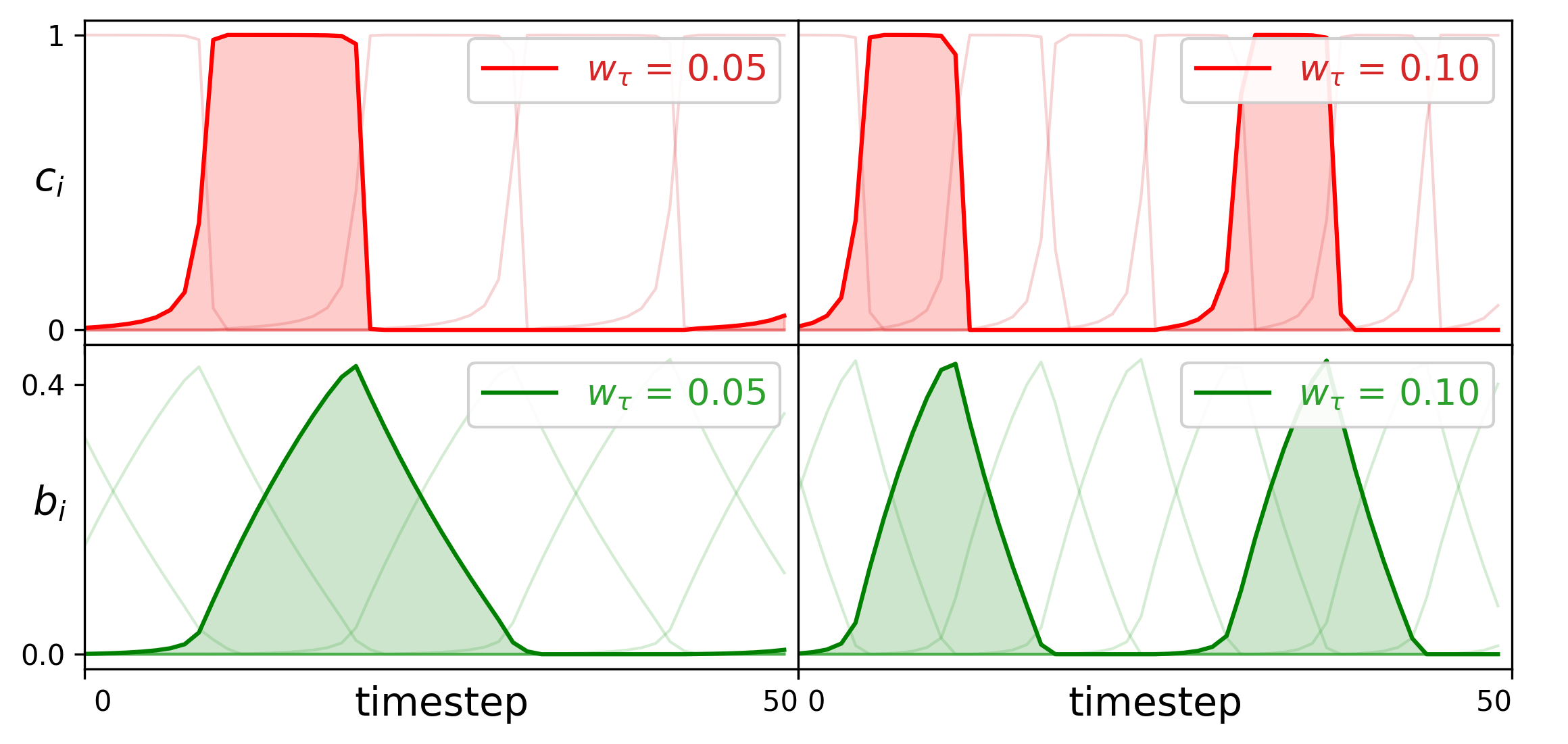
技术框架:SME-AGOL算法主要包含两个模块:顺序运动执行器(SME)和自适应梯度加权在线学习(AGOL)。SME是一个三层神经网络,第一层生成顺序传播的隐藏状态,第二层构建三角基函数,第三层将基函数映射到电机指令。AGOL算法根据参数的相关性,自适应地调整梯度权重,从而优先更新重要的参数。整个算法流程是:首先,SME根据当前状态生成电机指令;然后,机器人执行指令并获得奖励;最后,AGOL算法根据奖励更新SME的参数。
关键创新:SME-AGOL算法的关键创新在于其可解释的神经网络结构和自适应在线学习算法。SME网络结构的设计使得网络的中间层能够表示机器人关键姿态,从而实现可解释性。AGOL算法通过自适应地调整梯度权重,使得模型能够快速适应新的数据,从而提高样本效率。
关键设计:SME网络的第一层使用循环神经网络(RNN)生成顺序传播的隐藏状态。第二层使用三角基函数,每个基函数对应一个特定的机器人姿态。第三层使用线性映射将基函数映射到电机指令。AGOL算法使用相关性得分来衡量参数的重要性,相关性得分根据参数对奖励的影响来计算。损失函数使用均方误差(MSE)来衡量预测电机指令和实际电机指令之间的差异。
🖼️ 关键图片

📊 实验亮点
实验结果表明,SME-AGOL算法在模拟六足机器人上,相比于现有方法,所需的样本减少了40%,最终奖励/运动性能提高了150%。在物理六足机器人上,SME-AGOL算法仅需10分钟即可从头开始学习,证明了其在真实机器人系统中的可行性和高效性。
🎯 应用场景
该研究成果可应用于各种机器人运动控制领域,例如四足机器人、人形机器人、机械臂等。通过提高样本效率和模型可解释性,可以降低机器人运动控制系统的开发成本和调试难度,加速机器人在复杂环境中的应用。此外,该方法还可以应用于其他需要可解释性和样本高效性的机器学习任务。
📄 摘要(原文)
Robot locomotion learning using reinforcement learning suffers from training sample inefficiency and exhibits the non-understandable/black-box nature. Thus, this work presents a novel SME-AGOL to address such problems. Firstly, Sequential Motion Executor (SME) is a three-layer interpretable neural network, where the first produces the sequentially propagating hidden states, the second constructs the corresponding triangular bases with minor non-neighbor interference, and the third maps the bases to the motor commands. Secondly, the Adaptable Gradient-weighting Online Learning (AGOL) algorithm prioritizes the update of the parameters with high relevance score, allowing the learning to focus more on the highly relevant ones. Thus, these two components lead to an analyzable framework, where each sequential hidden state/basis represents the learned key poses/robot configuration. Compared to state-of-the-art methods, the SME-AGOL requires 40% fewer samples and receives 150% higher final reward/locomotion performance on a simulated hexapod robot, while taking merely 10 minutes of learning time from scratch on a physical hexapod robot. Taken together, this work not only proposes the SME-AGOL for sample efficient and understandable locomotion learning but also emphasizes the potential exploitation of interpretability for improving sample efficiency and learning performance.