Early Failure Detection in Autonomous Surgical Soft-Tissue Manipulation via Uncertainty Quantification
作者: Jordan Thompson, Ronald Koe, Anthony Le, Gabriella Goodman, Daniel S. Brown, Alan Kuntz
分类: cs.RO
发布日期: 2025-01-17 (更新: 2025-08-25)
备注: 6 pages, 6 figures, Accepted to the 2025 RSS OOD Workshop
💡 一句话要点
提出基于不确定性量化的手术软组织操作早期失败检测方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主手术机器人 软组织操作 不确定性量化 早期失败检测 深度集成
📋 核心要点
- 现有基于学习的软组织操作方法在组织几何形状和硬度变化时,尤其在分布外情况下,性能会显著下降。
- 论文核心思想是利用不确定性量化来识别可能导致任务失败的分布外状态,从而实现早期失败检测。
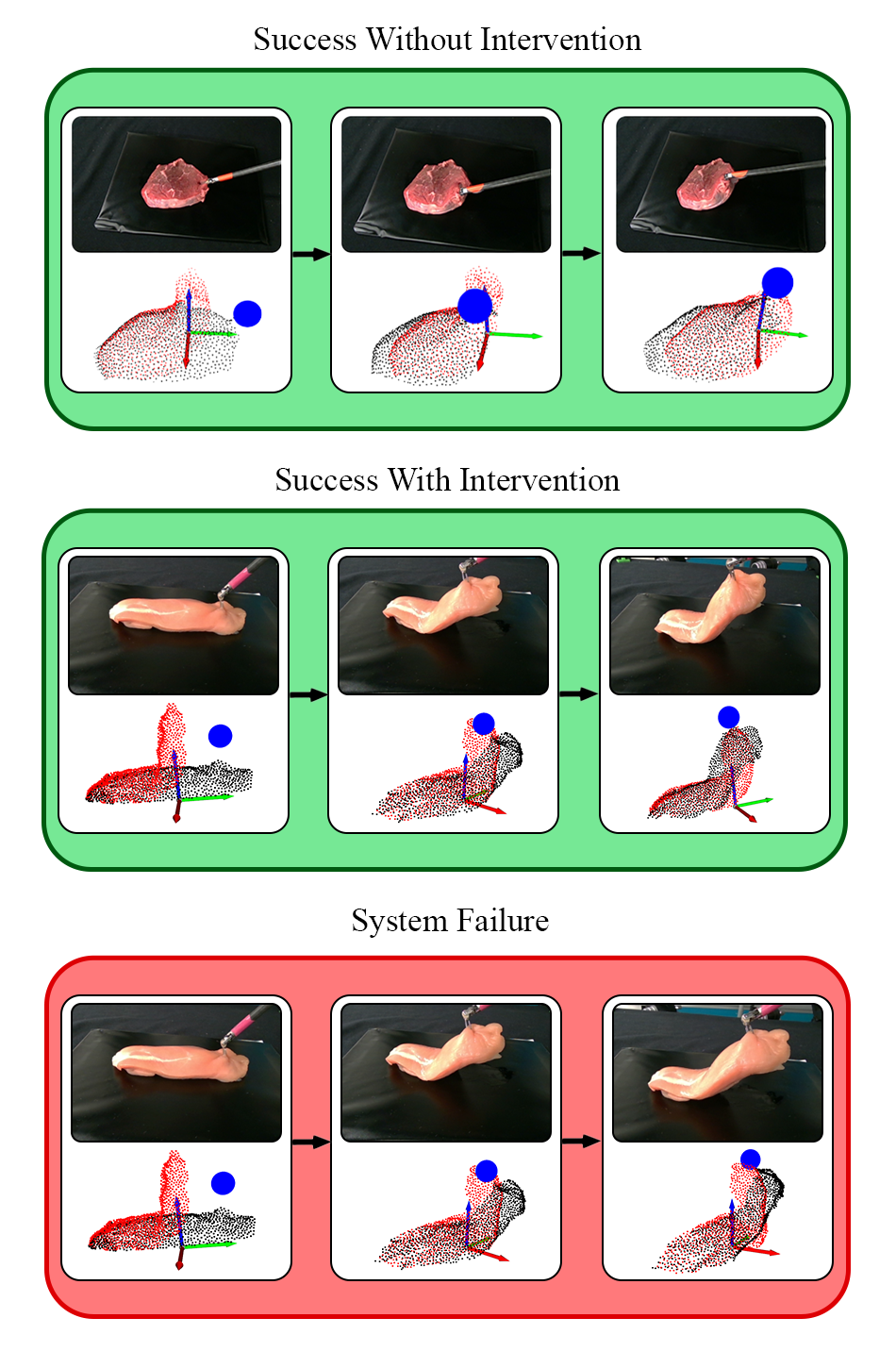
- 实验表明,该方法在真实机器人上能有效检测失败状态,并请求人工干预,零样本sim2real性能提升47.5%。
📝 摘要(中文)
针对外科医生短缺和手术需求增加的问题,自主手术机器人是一种有前景的解决方案。最近的研究提出了基于学习的软组织自主操作方法。然而,由于组织几何形状和硬度的变化,这些方法并不总是表现最佳,尤其是在分布外(out-of-distribution)的情况下。本文首次将不确定性量化应用于学习到的手术软组织操作策略,作为任务失败的早期识别系统。我们分析了两种不同的不确定性量化方法:深度集成和蒙特卡洛dropout,发现深度集成提供了更强的任务成功或失败信号。我们使用真实的达芬奇研究工具包(dVRK)手术机器人验证了我们的方法,以执行真实的软组织操作。结果表明,我们能够成功检测导致任务失败的分布外状态,并在必要时请求人工干预,同时在可能的情况下实现自主操作。我们基于不确定性的早期失败检测的学习组织操作策略,在学习到的软组织操作中,实现了比现有技术水平提高47.5%的零样本sim2real性能。我们还表明,我们的方法可以很好地推广到新型组织以及双手软组织操作任务。
🔬 方法详解
问题定义:论文旨在解决自主手术机器人软组织操作中,由于组织特性变化导致任务失败的问题。现有基于学习的方法在面对分布外数据时,泛化能力不足,容易出现操作失误,甚至造成医疗事故。因此,需要一种方法能够提前预测潜在的失败,并及时进行干预。
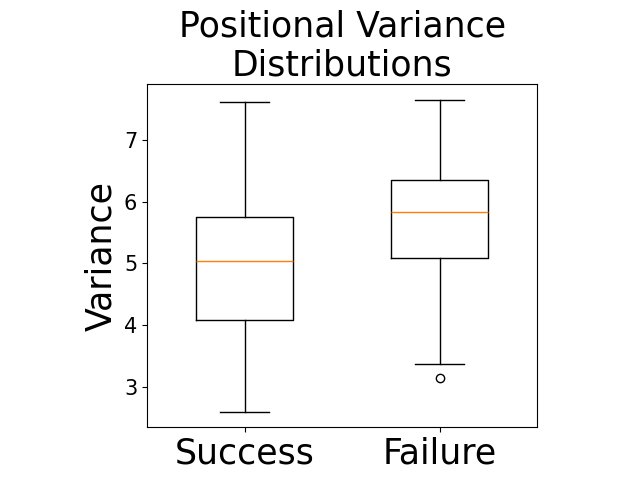
核心思路:论文的核心思路是利用不确定性量化来评估当前状态是否属于分布外状态,从而预测任务失败的可能性。如果模型对当前状态的预测结果不确定性很高,则表明该状态很可能超出模型的训练范围,存在较高的失败风险。通过设定阈值,可以在任务失败前及时请求人工干预。
技术框架:整体框架包含以下几个主要模块:1) 软组织操作策略学习模块,用于学习自主操作策略;2) 不确定性量化模块,用于评估当前状态的不确定性;3) 失败检测模块,基于不确定性值判断是否需要人工干预。具体流程是:机器人执行操作,不确定性量化模块评估当前状态的不确定性,如果超过阈值,则触发人工干预,否则继续自主操作。
关键创新:论文的关键创新在于将不确定性量化引入到手术软组织操作的早期失败检测中。与传统方法相比,该方法不需要额外的训练数据或复杂的模型设计,可以直接利用现有学习到的策略进行不确定性评估,从而实现对分布外状态的有效检测。此外,论文还比较了两种不同的不确定性量化方法(深度集成和蒙特卡洛dropout),并发现深度集成效果更好。
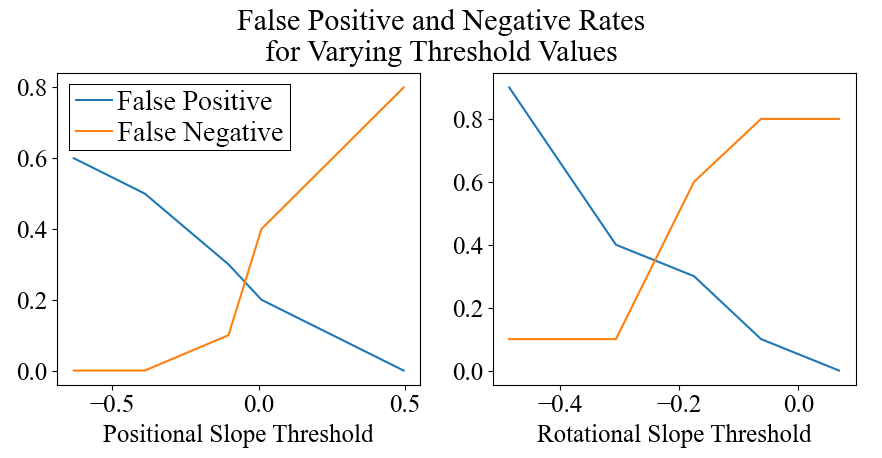
关键设计:论文中,不确定性量化模块使用了深度集成方法,即训练多个具有不同初始化的神经网络,并使用它们的预测结果的方差作为不确定性的度量。具体来说,使用了5个神经网络组成的集成。阈值的设定是通过在验证集上进行实验,选择能够最大化检测准确率和最小化误报率的阈值。
🖼️ 关键图片
📊 实验亮点
实验结果表明,基于不确定性的早期失败检测方法能够有效提高自主软组织操作的性能。在真实达芬奇机器人上的实验中,该方法实现了比现有技术水平提高47.5%的零样本sim2real性能。此外,该方法还能够很好地推广到新型组织以及双手软组织操作任务中,表明其具有良好的泛化能力。
🎯 应用场景
该研究成果可应用于各种需要自主软组织操作的场景,例如微创手术、远程手术等。通过早期失败检测,可以提高手术的安全性和成功率,减少医疗事故的发生。此外,该方法还可以推广到其他类型的机器人操作任务中,例如抓取、装配等,具有广泛的应用前景。
📄 摘要(原文)
Autonomous surgical robots are a promising solution to the increasing demand for surgery amid a shortage of surgeons. Recent work has proposed learning-based approaches for the autonomous manipulation of soft tissue. However, due to variability in tissue geometries and stiffnesses, these methods do not always perform optimally, especially in out-of-distribution settings. We propose, develop, and test the first application of uncertainty quantification to learned surgical soft-tissue manipulation policies as an early identification system for task failures. We analyze two different methods of uncertainty quantification, deep ensembles and Monte Carlo dropout, and find that deep ensembles provide a stronger signal of future task success or failure. We validate our approach using the physical daVinci Research Kit (dVRK) surgical robot to perform physical soft-tissue manipulation. We show that we are able to successfully detect out-of-distribution states leading to task failure and request human intervention when necessary while still enabling autonomous manipulation when possible. Our learned tissue manipulation policy with uncertainty-based early failure detection achieves a zero-shot sim2real performance improvement of 47.5% over the prior state of the art in learned soft-tissue manipulation. We also show that our method generalizes well to new types of tissue as well as to a bimanual soft-tissue manipulation task.