Tethered Variable Inertial Attitude Control Mechanisms through a Modular Jumping Limbed Robot
作者: Yusuke Tanaka, Alvin Zhu, Dennis Hong
分类: cs.RO
发布日期: 2025-01-17
备注: Proceeding to IEEE Aerospace Conference 2025
💡 一句话要点
提出一种基于系绳可变惯性姿态控制的模块化跳跃机器人,用于低重力行星探索。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 跳跃机器人 姿态控制 惯性变形 模型预测控制 低重力环境
📋 核心要点
- 现有行星探测机器人姿态控制依赖飞轮或气动控制,体积和能耗高,不适用于小型化跳跃机器人。
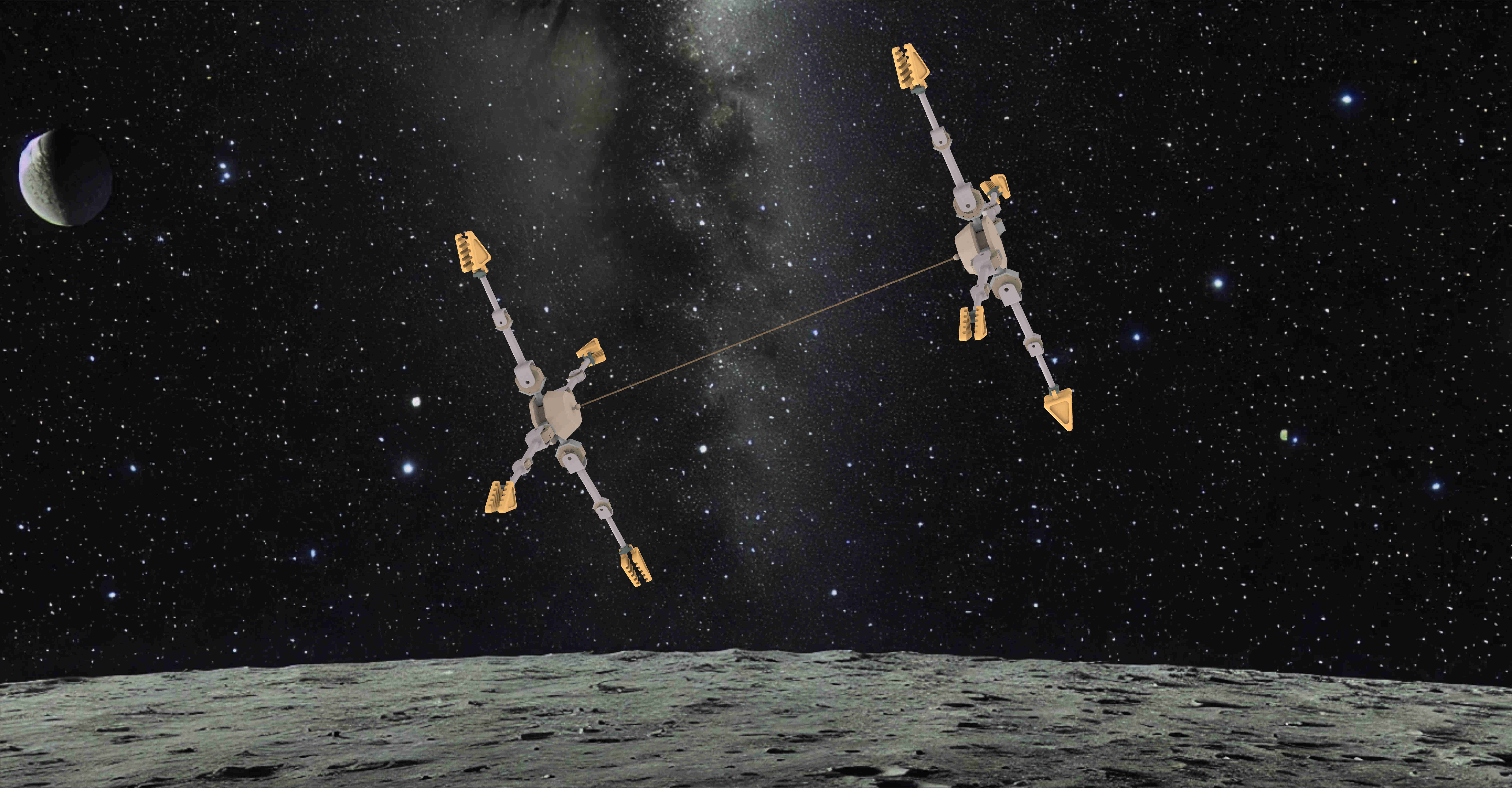
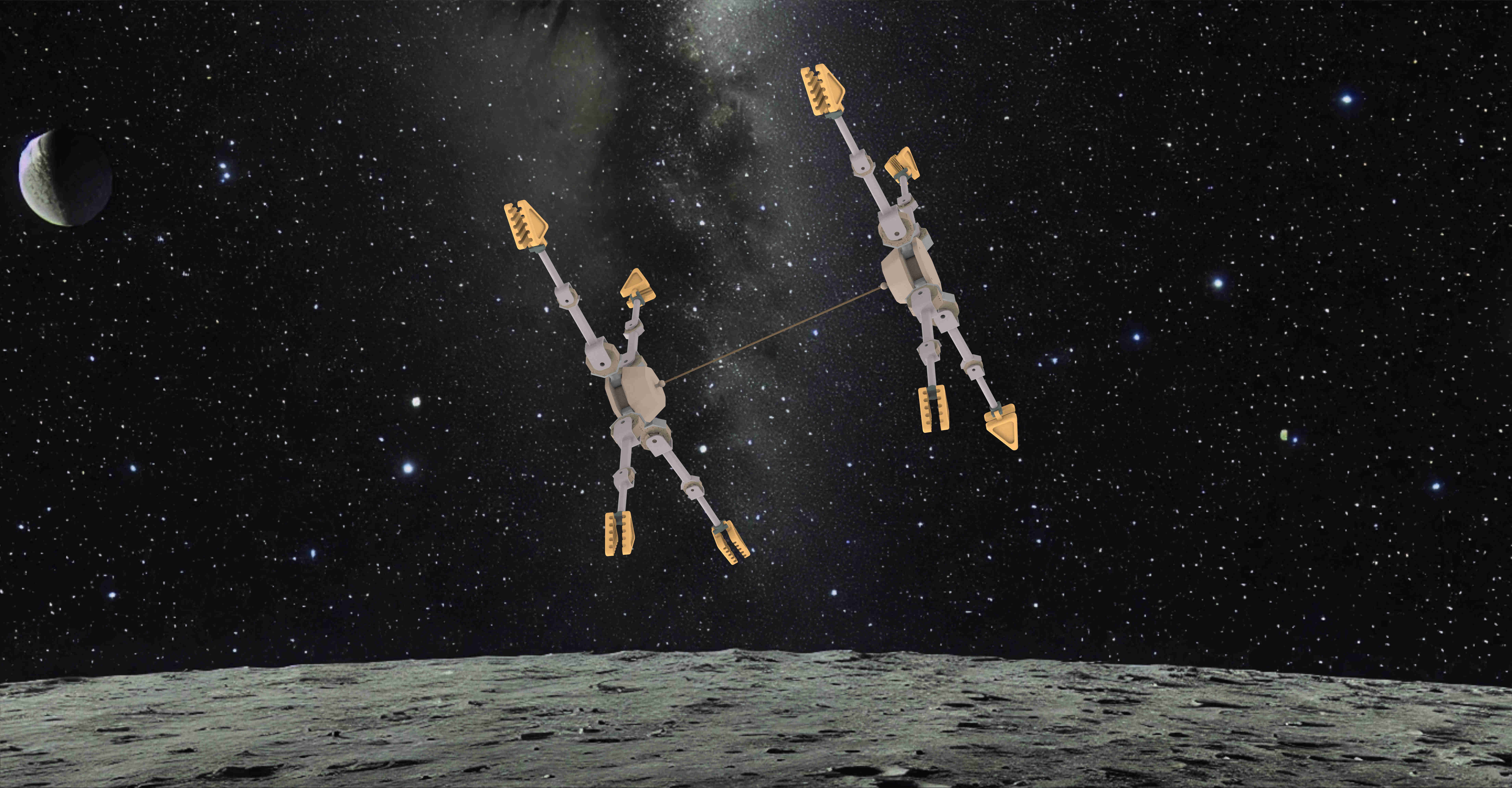
- 论文提出一种基于系绳连接的双四足机器人系统,通过调整肢体和系绳长度改变整体惯性,实现姿态控制。
- 通过模型预测控制,仿真验证了该方法在低重力环境下稳定飞行姿态的有效性,无需飞轮或气动控制。
📝 摘要(中文)
本文提出了一种用于模块化跳跃机器人的系绳可变惯性姿态控制机制,该机器人专为低重力环境下的行星探索而设计。该系统名为SPLITTER,由两个重量小于10公斤的四足机器人组成,它们通过系绳连接,能够执行连续的跳跃步态,并利用惯性变形技术稳定飞行姿态。通过模型预测控制(MPC),通过调整肢体和系绳长度来调节系统的主惯性矩,从而实现姿态控制。结果表明,这种控制策略使机器人能够在飞行阶段稳定姿态,而无需传统的基于飞轮的系统或依赖空气动力学,从而使该方法具有质量效率,非常适合小型行星机器人的连续跳跃。本文概述了动力学、用于惯性变形的MPC公式、执行器要求和仿真结果,展示了小型漫游车在月球或小行星等低重力环境中进行敏捷探索的潜力。
🔬 方法详解
问题定义:在低重力环境下,小型跳跃机器人难以依靠传统的飞轮或气动控制进行姿态稳定。现有方法体积大、能耗高,不适用于小型化、轻量化的行星探测机器人,限制了其在月球、小行星等环境下的探索能力。
核心思路:论文的核心思路是利用机器人自身的肢体运动和系绳长度变化来调节整体的惯性分布,从而实现姿态控制。通过改变主惯性矩的方向和大小,可以在飞行过程中产生控制力矩,稳定机器人的姿态。这种方法避免了使用额外的姿态控制装置,降低了系统的复杂性和重量。
技术框架:该系统由两个通过系绳连接的四足机器人组成。整体控制流程如下:首先,通过视觉或惯性传感器获取机器人的姿态信息;然后,利用模型预测控制(MPC)算法,根据期望的姿态轨迹,计算出每个机器人的肢体运动和系绳长度变化;最后,驱动电机控制肢体和系绳,实现姿态调整。
关键创新:该方法最重要的创新点在于利用可变惯性进行姿态控制。与传统的姿态控制方法相比,该方法不需要额外的执行机构,而是通过改变机器人自身的结构来实现姿态调整,从而降低了系统的重量和复杂性。此外,使用系绳连接两个机器人,可以进一步增加惯性调节的范围。
关键设计:MPC控制器的设计是关键。目标函数需要考虑姿态误差、控制输入(肢体角度和系绳长度)的约束以及能量消耗。动力学模型需要精确描述机器人和系绳的运动关系,包括重力、惯性力、科里奥利力等。执行器的选型需要满足快速响应和高精度的要求,以保证姿态控制的精度。
🖼️ 关键图片

📊 实验亮点
仿真结果表明,该方法能够有效地稳定机器人在飞行阶段的姿态。通过调整肢体和系绳长度,可以实现对机器人姿态的精确控制,无需传统的飞轮或气动控制系统。该方法在保证姿态稳定性的同时,显著降低了系统的重量和功耗,为小型行星探测机器人的设计提供了新的思路。
🎯 应用场景
该研究成果可应用于月球、小行星等低重力环境下的行星探测任务。小型跳跃机器人可以利用该姿态控制方法进行高效、灵活的移动和探索,例如在复杂地形中跳跃前进、进行三维地图构建、采集样本等。此外,该技术也可应用于其他需要轻量化、低功耗姿态控制的机器人系统,例如无人机、微型卫星等。
📄 摘要(原文)
This paper presents the concept of a tethered variable inertial attitude control mechanism for a modular jumping-limbed robot designed for planetary exploration in low-gravity environments. The system, named SPLITTER, comprises two sub-10 kg quadrupedal robots connected by a tether, capable of executing successive jumping gaits and stabilizing in-flight using inertial morphing technology. Through model predictive control (MPC), attitude control was demonstrated by adjusting the limbs and tether length to modulate the system's principal moments of inertia. Our results indicate that this control strategy allows the robot to stabilize during flight phases without needing traditional flywheel-based systems or relying on aerodynamics, making the approach mass-efficient and ideal for small-scale planetary robots' successive jumps. The paper outlines the dynamics, MPC formulation for inertial morphing, actuator requirements, and simulation results, illustrating the potential of agile exploration for small-scale rovers in low-gravity environments like the Moon or asteroids.