CoNav Chair: Design of a ROS-based Smart Wheelchair for Shared Control Navigation in the Built Environment
作者: Yifan Xu, Qianwei Wang, Jordan Lillie, Vineet Kamat, Carol Menassa
分类: cs.RO
发布日期: 2025-01-16
备注: 8 pages, 9 figures
💡 一句话要点
提出基于ROS的CoNav Chair智能轮椅,实现共享控制导航与避障
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 智能轮椅 共享控制 ROS 机器人导航 辅助技术
📋 核心要点
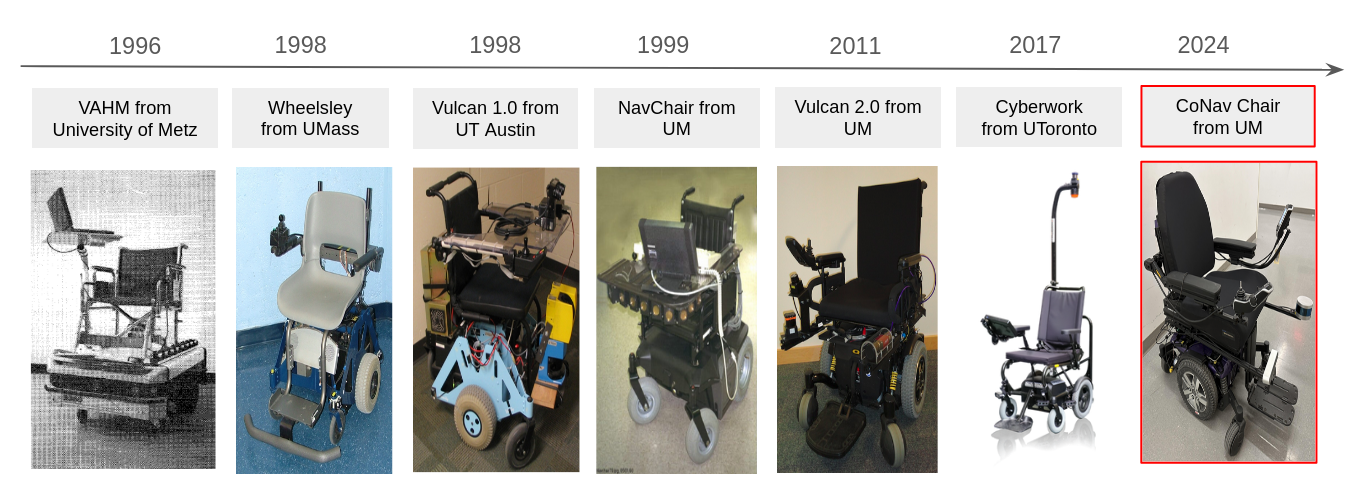
- 现有电动轮椅操作困难,且机器人轮椅研究侧重于完全自主或增强手动控制,导致效率和用户信任度降低。
- 提出CoNav Chair智能轮椅,采用基于ROS的共享控制导航算法和避障功能,旨在提升效率和用户信任。
- 实验结果表明,该智能轮椅硬件和软件设计在室内社交环境中表现良好,验证了其性能和有效性。
📝 摘要(中文)
随着全球残疾人数量逐年增加,对支持独立生活和社会融合的移动辅助设备的需求也在增长。轮椅是帮助残疾人在室内和室外环境中移动的常用工具。然而,目前的电动轮椅(PWC)通常无法满足残疾人的需求,他们可能觉得操作困难。此外,现有的机器人轮椅研究通常侧重于完全自主或增强的手动控制,这可能导致效率降低和用户信任度下降。为了解决这些问题,本文提出了一种基于机器人操作系统(ROS)的智能轮椅,称为CoNav Chair,它结合了共享控制导航算法和避障功能,以支持残疾人,同时促进机器人和用户之间的效率和信任。我们的设计包括硬件和软件组件。在典型的室内社交环境中进行的实验结果证明了智能轮椅硬件和软件设计的性能和有效性。这种集成设计提升了信任和自主性,这对于辅助移动技术在建筑环境中的接受度至关重要。
🔬 方法详解
问题定义:现有电动轮椅操作性差,难以满足残疾人需求。已有的机器人轮椅研究要么追求完全自主,要么过度依赖手动控制,导致用户体验不佳,效率低下,且难以建立用户信任。因此,需要一种能够平衡自主性和用户控制的智能轮椅系统。
核心思路:CoNav Chair的核心思路是实现共享控制导航,即结合用户的意图和机器人的自主能力,共同控制轮椅的运动。通过这种方式,用户可以参与到导航过程中,保持对轮椅的控制感,同时机器人可以辅助用户完成复杂的导航任务,例如避障和路径规划。这种设计旨在提高效率、增强用户信任,并最终提升用户体验。
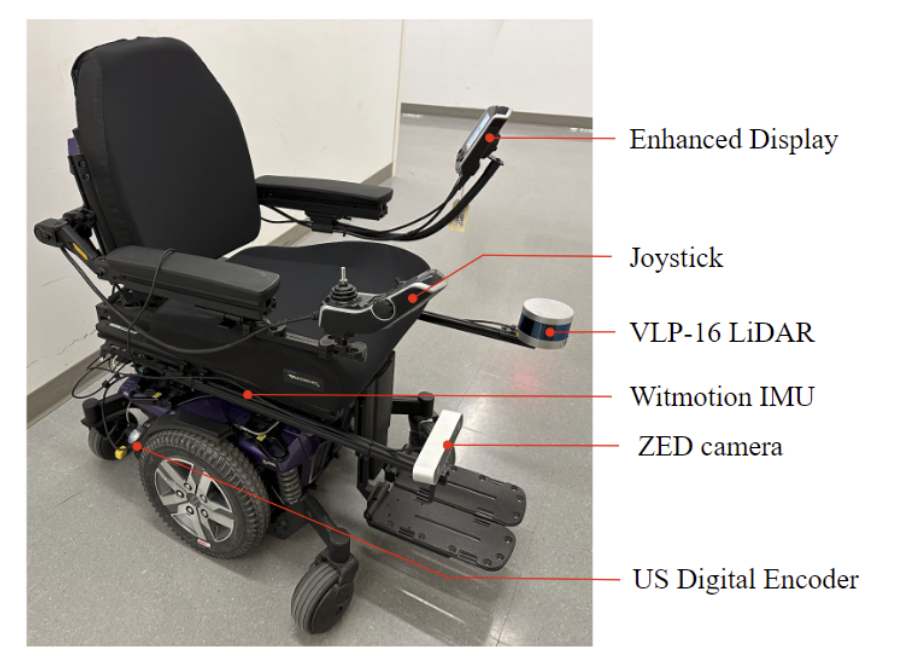
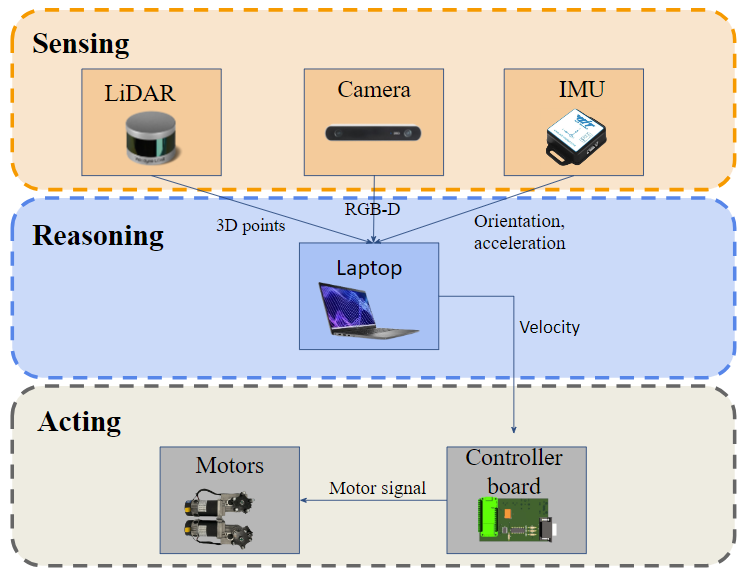
技术框架:CoNav Chair的整体架构包含硬件和软件两部分。硬件部分包括轮椅本体、传感器(例如激光雷达、摄像头等)和计算平台。软件部分基于ROS(机器人操作系统)构建,包含感知模块(负责环境感知和障碍物检测)、导航模块(实现共享控制导航算法和路径规划)和控制模块(负责控制轮椅的运动)。用户通过操纵杆等输入设备与轮椅进行交互。
关键创新:CoNav Chair的关键创新在于其共享控制导航算法。该算法能够根据用户的输入和环境信息,动态调整轮椅的控制策略。例如,在狭窄空间或复杂环境中,机器人可以接管更多的控制权,辅助用户避开障碍物;而在开阔空间,用户可以拥有更大的控制权,自由地控制轮椅的运动。这种动态调整能力是现有方法所缺乏的。
关键设计:CoNav Chair的关键设计包括:1) 传感器配置:选择合适的传感器类型和数量,以保证环境感知的准确性和可靠性。2) 共享控制算法:设计合理的权重分配机制,平衡用户意图和机器人自主性。3) 避障策略:采用有效的避障算法,确保轮椅在复杂环境中安全行驶。具体的参数设置和算法细节在论文中未详细描述,属于未知内容。
🖼️ 关键图片
📊 实验亮点
论文在典型的室内社交环境中进行了实验,验证了CoNav Chair智能轮椅的性能和有效性。虽然论文中没有提供具体的性能数据和对比基线,但实验结果表明,该智能轮椅能够实现共享控制导航和避障功能,提升用户体验和信任度。这种集成设计对于辅助移动技术在建筑环境中的应用具有重要意义。
🎯 应用场景
CoNav Chair智能轮椅可广泛应用于医院、养老院、商场等室内环境,为行动不便人士提供安全、高效、舒适的出行体验。该研究成果有助于提升残疾人的生活质量,促进其社会融合,并推动辅助移动技术的发展。未来,该技术还可扩展到其他类型的移动机器人,例如服务机器人和物流机器人。
📄 摘要(原文)
With the number of people with disabilities (PWD) increasing worldwide each year, the demand for mobility support to enable independent living and social integration is also growing. Wheelchairs commonly support the mobility of PWD in both indoor and outdoor environments. However, current powered wheelchairs (PWC) often fail to meet the needs of PWD, who may find it difficult to operate them. Furthermore, existing research on robotic wheelchairs typically focuses either on full autonomy or enhanced manual control, which can lead to reduced efficiency and user trust. To address these issues, this paper proposes a Robot Operating System (ROS)-based smart wheelchair, called CoNav Chair, that incorporates a shared control navigation algorithm and obstacle avoidance to support PWD while fostering efficiency and trust between the robot and the user. Our design consists of hardware and software components. Experimental results conducted in a typical indoor social environment demonstrate the performance and effectiveness of the smart wheelchair hardware and software design. This integrated design promotes trust and autonomy, which are crucial for the acceptance of assistive mobility technologies in the built environment.