Model Predictive Path Integral Docking of Fully Actuated Surface Vessel
作者: Akash Vijayakumar, Atmanand M A, Abhilash Somayajula
分类: cs.RO
发布日期: 2025-01-16
备注: 6 pages, 6 figures, 1 table, UT2025 Conference, IEEE International Symposium on Underwater Technology 2025
💡 一句话要点
提出基于MPPI控制与LiDAR实时检测的自主水面船只靠泊方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主靠泊 模型预测控制 路径积分 LiDAR 水面船只
📋 核心要点
- 自主靠泊是海洋机器人中最具挑战性的操作之一,需要在狭小空间内进行精确控制和鲁棒感知。
- 论文提出了一种结合MPPI控制和LiDAR实时码头检测的框架,通过概率轨迹优化和多目标代价函数实现精确、安全和高效的靠泊。
- 在包含真实传感器噪声、船舶动力学和环境约束的仿真环境中验证了该方法,结果表明该方法能够从不同初始位置成功靠泊。
📝 摘要(中文)
本文提出了一种将模型预测路径积分(MPPI)控制与基于LiDAR的实时码头检测相结合的自主水面船只靠泊新方法。该框架独特地将概率轨迹优化与多目标代价函数相结合,同时考虑了靠泊精度、安全约束和运动效率。MPPI控制器通过智能地采样控制序列并根据动态间隙要求、方向对齐和目标位置目标评估其成本来生成最佳轨迹。引入了一种自适应码头检测流程,该流程处理LiDAR点云以提取关键几何特征,从而实现码头参数的实时更新。该方法在基于物理的仿真环境中进行了广泛验证,该环境结合了真实的传感器噪声、船舶动力学和环境约束。结果表明,从各种初始位置成功靠泊,同时保持安全间隙和平稳的运动特性。
🔬 方法详解
问题定义:自主水面船只的精确靠泊是一个复杂问题,尤其是在存在环境干扰和传感器噪声的情况下。现有方法可能难以在保证安全间隙的同时实现高精度和运动效率,并且对感知系统的鲁棒性要求较高。
核心思路:论文的核心思路是将模型预测控制(MPC)的路径积分(PI)方法,即MPPI控制,与基于LiDAR的实时码头检测相结合。MPPI能够通过采样控制序列并评估其代价函数来优化轨迹,而LiDAR则提供实时的环境感知信息,从而实现鲁棒和精确的靠泊。
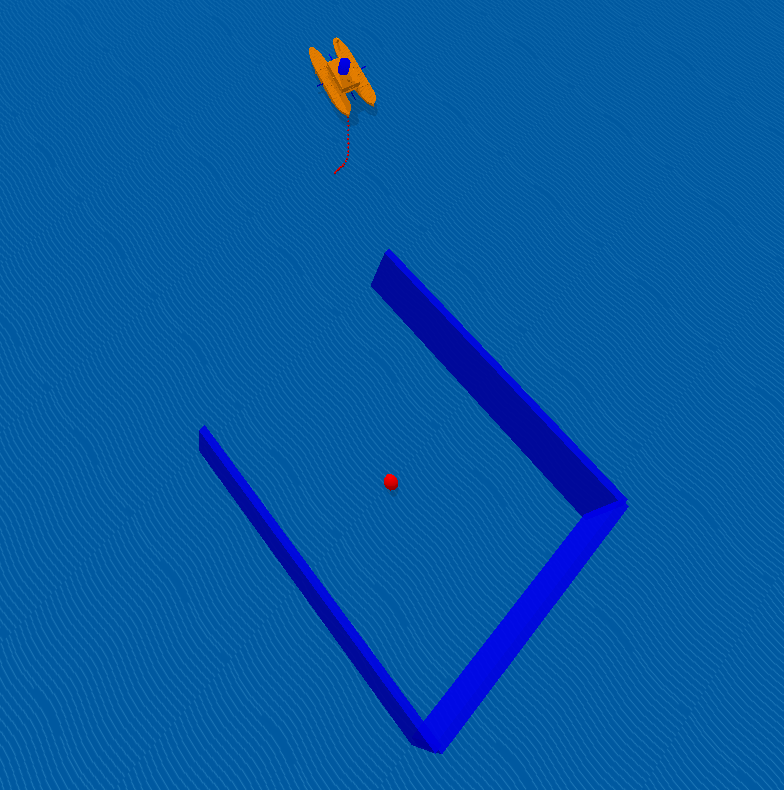
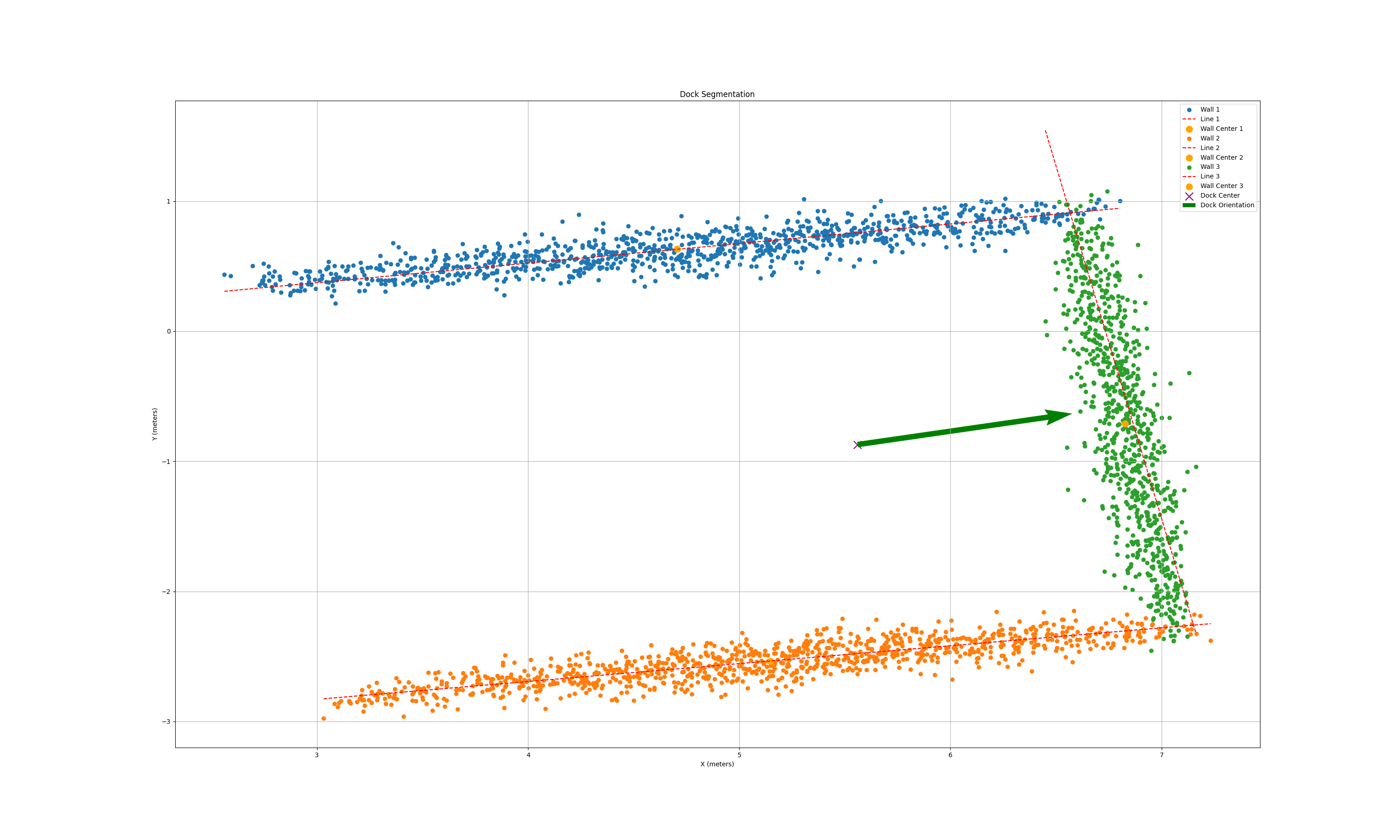
技术框架:该框架包含两个主要模块:MPPI控制器和LiDAR码头检测模块。LiDAR模块负责实时获取环境信息,提取码头的几何特征,并更新码头参数。MPPI控制器则基于这些参数,通过采样控制序列并评估多目标代价函数来生成最佳轨迹。代价函数综合考虑了靠泊精度、安全约束和运动效率。
关键创新:该方法的主要创新在于将MPPI控制与LiDAR实时检测相结合,并设计了一个多目标代价函数,从而在保证安全性的前提下实现了高精度和运动效率的靠泊。此外,自适应码头检测流程能够处理LiDAR点云,提取关键几何特征,实现码头参数的实时更新。
关键设计:代价函数的设计是关键,它需要平衡靠泊精度、安全约束和运动效率。具体而言,代价函数可能包含目标位置误差、方向误差、与障碍物的距离、控制输入的幅度等项。MPPI控制器的采样策略和参数设置也会影响性能。LiDAR码头检测模块的关键在于点云滤波、分割和特征提取算法的选择。
🖼️ 关键图片
📊 实验亮点
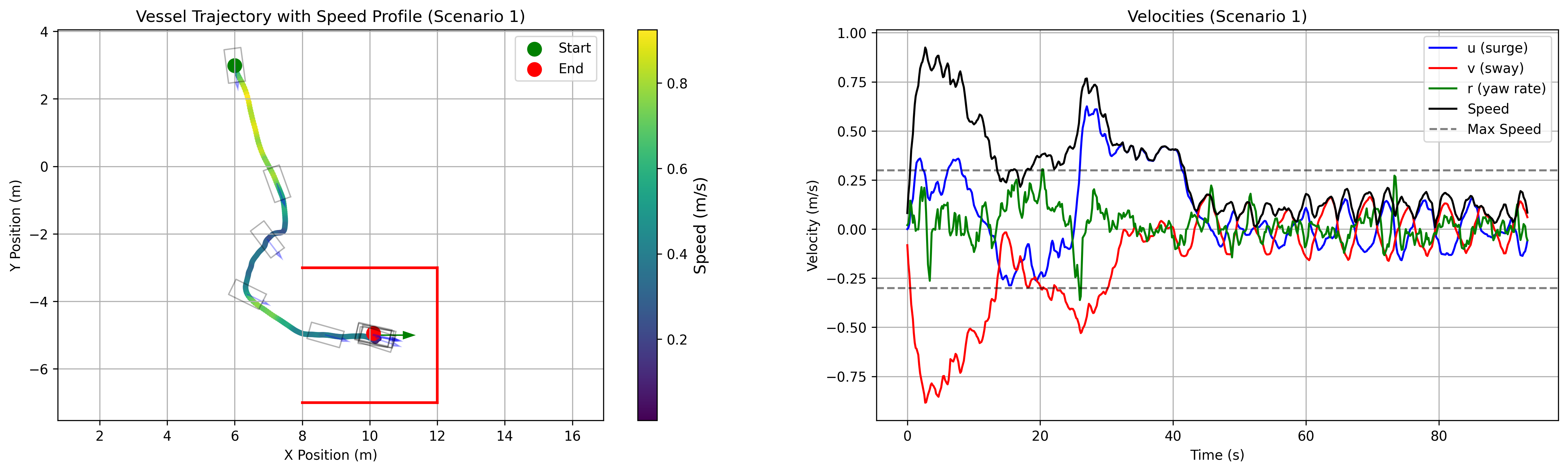
该方法在基于物理的仿真环境中进行了验证,结果表明该方法能够从各种初始位置成功靠泊,同时保持安全间隙和平稳的运动特性。虽然论文中没有给出具体的性能数据,但强调了该方法在真实传感器噪声、船舶动力学和环境约束下的鲁棒性。
🎯 应用场景
该研究成果可应用于各种自主水面船只的靠泊场景,例如港口自动化、海上补给、水下机器人回收等。该方法能够提高靠泊的精度、安全性和效率,降低人工干预的需求,具有重要的实际应用价值和商业前景。未来,该技术有望扩展到更复杂的海洋环境和更大型的船舶。
📄 摘要(原文)
Autonomous docking remains one of the most challenging maneuvers in marine robotics, requiring precise control and robust perception in confined spaces. This paper presents a novel approach integrating Model Predictive Path Integral(MPPI) control with real-time LiDAR-based dock detection for autonomous surface vessel docking. Our framework uniquely combines probabilistic trajectory optimization with a multiobjective cost function that simultaneously considers docking precision, safety constraints, and motion efficiency. The MPPI controller generates optimal trajectories by intelligently sampling control sequences and evaluating their costs based on dynamic clearance requirements, orientation alignment, and target position objectives. We introduce an adaptive dock detection pipeline that processes LiDAR point clouds to extract critical geometric features, enabling real-time updates of docking parameters. The proposed method is extensively validated in a physics-based simulation environment that incorporates realistic sensor noise, vessel dynamics, and environmental constraints. Results demonstrate successful docking from various initial positions while maintaining safe clearances and smooth motion characteristics.