Interoceptive Robots for Convergent Shared Control in Collaborative Construction Work
作者: Xiaoshan Zhou, Carol C. Menassa, Vineet R. Kamat
分类: cs.RO
发布日期: 2025-01-16
💡 一句话要点
提出基于内感受的自主移动机器人,用于协同建造中的融合共享控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 建筑机器人 自主移动机器人 内感受 共享控制 运动规划 人机协作 多机器人系统
📋 核心要点
- 现有建筑机器人难以适应动态环境和变化的任务需求,限制了其在自动化建造中的应用。
- 论文提出基于内感受的机器人控制方法,通过模拟生物体的自适应能力,提升机器人的自主性和适应性。
- 通过仿真实验验证了所提方法在多机器人运动规划和堆叠任务中的有效性,为建筑机器人通用人工智能发展奠定基础。
📝 摘要(中文)
为了推进建筑机器人技术的发展,本文旨在构建具有优化效率和自适应能力的自主移动机器人(AMR),使其能够响应不断变化的任务需求和动态环境。受生物体自适应自主性的启发,我们引入了内感受,它以机器人内部状态表示为中心,作为开发自我反思和有意识学习的基础,从而实现机器人代理的持续学习和适应性。本文将内部状态变量和数学属性分解为共享控制范式中的“认知失调”,在这种范式中,偶尔会发生人为干预。我们提供了一个新的视角,即内感受如何通过将基于网格/图算法的启发式成本与神经科学和强化学习的最新进展相结合,来帮助构建AMR中的自适应运动规划。从人类语义输入中提取的声明性和程序性知识被编码到超图模型中,该模型与现场布局的空间配置重叠,用于路径规划。此外,我们设计了一个使用具有少量样本学习的编码器-解码器架构的速度重放模块,使机器人能够在上下文中复制速度曲线,以实现多机器人同步和移交协作。这些“缓存”的知识表示在模拟环境中进行了多机器人运动规划和堆叠任务的演示。这项研究的见解为AMR中的通用人工智能铺平了道路,促进了它们在建筑自动化中从复杂性到能力的进步。
🔬 方法详解
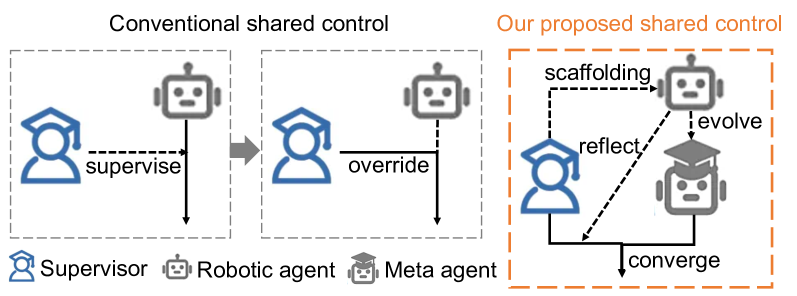
问题定义:论文旨在解决建筑环境中自主移动机器人(AMR)的自适应运动规划问题,尤其是在人机协作场景下。现有方法,如传统的基于网格或图的算法,虽然可以进行路径规划,但缺乏对机器人自身状态的感知和对环境变化的快速适应能力。人为干预会导致“认知失调”,影响机器人的规划效率和稳定性。
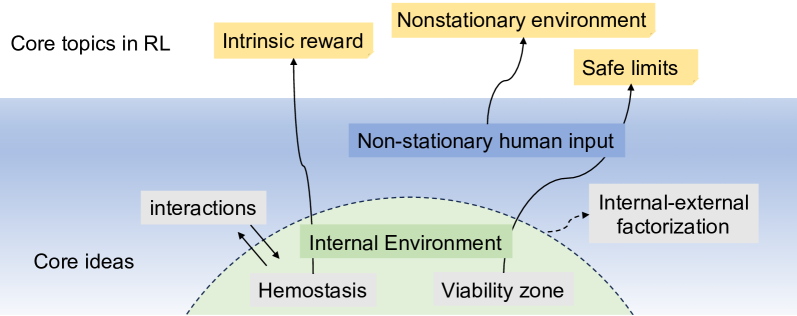
核心思路:论文的核心思路是引入“内感受”概念,模拟生物体对自身内部状态的感知,使机器人能够进行自我反思和有意识学习。通过将内部状态变量和数学属性分解为“认知失调”,机器人可以更好地理解和应对人为干预,从而实现更鲁棒和高效的运动规划。此外,结合启发式算法、神经科学和强化学习的优势,构建自适应运动规划能力。
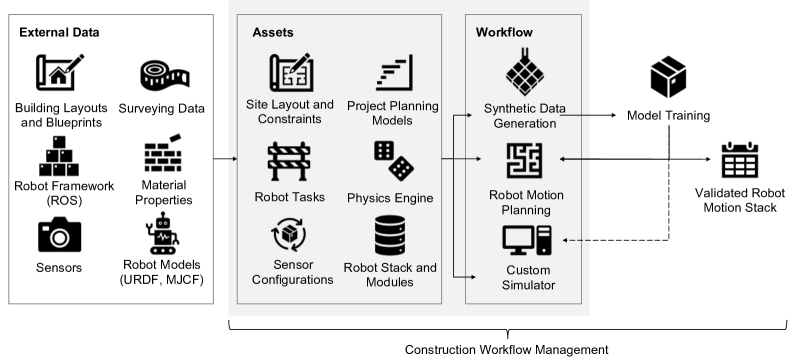
技术框架:整体框架包括以下几个主要模块:1) 内感受模块:负责感知和表示机器人的内部状态,例如速度、加速度、电池电量等。2) 超图模型:用于编码从人类语义输入中提取的声明性和程序性知识,并与现场布局的空间配置进行关联,为路径规划提供上下文信息。3) 自适应运动规划模块:结合启发式成本、神经科学和强化学习,生成适应环境变化的运动轨迹。4) 速度重放模块:使用编码器-解码器架构,通过少量样本学习,使机器人能够复制速度曲线,实现多机器人同步和移交协作。
关键创新:论文的关键创新在于将内感受概念引入建筑机器人领域,并将其与运动规划相结合。通过内感受,机器人能够更好地理解自身状态和环境变化,从而实现更智能和自适应的运动规划。此外,使用超图模型编码人类知识,并结合速度重放模块,实现了更高效的人机协作和多机器人协同。
关键设计:1) 超图模型:用于表示环境信息和人类知识,节点表示空间位置或对象,超边表示它们之间的关系。2) 速度重放模块:采用编码器-解码器架构,使用少量样本学习速度曲线的潜在表示,并通过解码器生成新的速度曲线。损失函数可能包括重构损失和对抗损失,以保证生成速度曲线的质量和多样性。3) 认知失调的量化:通过数学模型量化人为干预对机器人内部状态的影响,并将其作为运动规划的约束条件。
🖼️ 关键图片
📊 实验亮点
论文在仿真环境中验证了所提方法的有效性。通过多机器人运动规划和堆叠任务的实验,展示了机器人能够根据环境变化和人为干预,自适应地调整运动轨迹,实现高效的协作。速度重放模块能够通过少量样本学习,快速复制速度曲线,提高了多机器人同步的效率。
🎯 应用场景
该研究成果可应用于建筑工地的自动化建造、物料搬运、安全巡检等领域。通过提升机器人的自主性和适应性,可以减少人为干预,提高施工效率和安全性,降低运营成本和碳排放。未来,该技术有望推动建筑机器人向通用人工智能方向发展,实现更复杂的自动化任务。
📄 摘要(原文)
Building autonomous mobile robots (AMRs) with optimized efficiency and adaptive capabilities-able to respond to changing task demands and dynamic environments-is a strongly desired goal for advancing construction robotics. Such robots can play a critical role in enabling automation, reducing operational carbon footprints, and supporting modular construction processes. Inspired by the adaptive autonomy of living organisms, we introduce interoception, which centers on the robot's internal state representation, as a foundation for developing self-reflection and conscious learning to enable continual learning and adaptability in robotic agents. In this paper, we factorize internal state variables and mathematical properties as "cognitive dissonance" in shared control paradigms, where human interventions occasionally occur. We offer a new perspective on how interoception can help build adaptive motion planning in AMRs by integrating the legacy of heuristic costs from grid/graph-based algorithms with recent advances in neuroscience and reinforcement learning. Declarative and procedural knowledge extracted from human semantic inputs is encoded into a hypergraph model that overlaps with the spatial configuration of onsite layout for path planning. In addition, we design a velocity-replay module using an encoder-decoder architecture with few-shot learning to enable robots to replicate velocity profiles in contextualized scenarios for multi-robot synchronization and handover collaboration. These "cached" knowledge representations are demonstrated in simulated environments for multi-robot motion planning and stacking tasks. The insights from this study pave the way toward artificial general intelligence in AMRs, fostering their progression from complexity to competence in construction automation.