Self-Organizing Edge Computing Distribution Framework for Visual SLAM
作者: Jussi Kalliola, Lauri Suomela, Sergio Moreschini, David Hästbacka
分类: cs.RO, cs.CV, cs.DC
发布日期: 2025-01-15
备注: 8 pages, 5 figures
💡 一句话要点
提出自组织边缘计算框架,提升视觉SLAM在资源受限环境下的鲁棒性
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉SLAM 边缘计算 分布式系统 自组织网络 移动机器人
📋 核心要点
- 资源受限的移动机器人难以同时进行实时跟踪和计算密集型的地图优化,边缘辅助SLAM虽然可以卸载计算,但依赖中心服务器易受网络故障影响。
- 本文提出一种自组织边缘计算框架,通过分布式执行SLAM,无需依赖中心服务器,从而提高系统在网络不稳定环境下的鲁棒性。
- 实验表明,该框架在分布式和单机模式下,均能达到与ORB SLAM3相当的精度和资源利用率,同时实现了协同计算能力。
📝 摘要(中文)
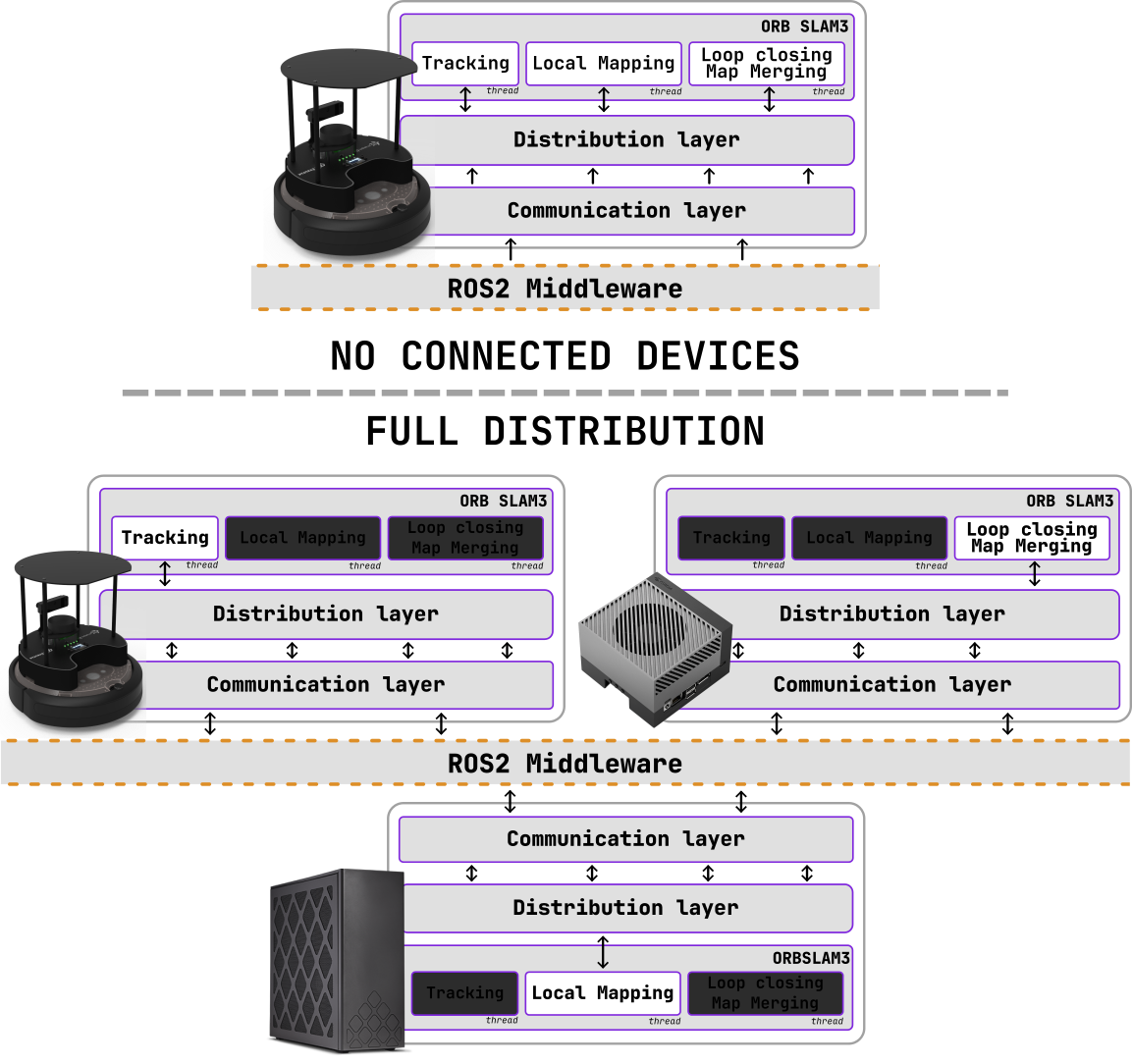
本文提出了一种新颖的边缘辅助SLAM框架,该框架能够实现完全分布式的SLAM执行,可以在设备网络中运行,也可以在没有连接的单个设备上运行。该架构包含三层,具有设备无关性,能够抵抗网络故障,并且对核心SLAM系统的侵入性最小。我们针对单目ORB SLAM3实现了该框架,并在完全分布式和独立SLAM配置中对其进行了评估,并与ORB SLAM3进行了比较。实验结果表明,所提出的设计在实现协同执行的同时,在精度和资源利用率方面与单体方法相匹配。
🔬 方法详解
问题定义:现有边缘辅助SLAM方法通常采用客户端-服务器架构,依赖于中心服务器进行计算卸载。这种架构对服务器和网络故障非常敏感,一旦服务器或网络出现问题,整个SLAM系统将无法正常工作。因此,如何在资源受限的移动机器人上实现鲁棒的SLAM,同时避免对中心服务器的依赖,是一个亟待解决的问题。
核心思路:本文的核心思路是将SLAM任务进行分解,并在多个边缘设备上进行分布式执行。通过自组织的方式,各个设备可以协同完成SLAM任务,而无需依赖中心服务器。这种分布式架构可以提高系统的容错性和可扩展性,即使部分设备出现故障,整个系统仍然可以继续运行。此外,该框架的设计目标是设备无关性,可以运行在各种类型的边缘设备上。
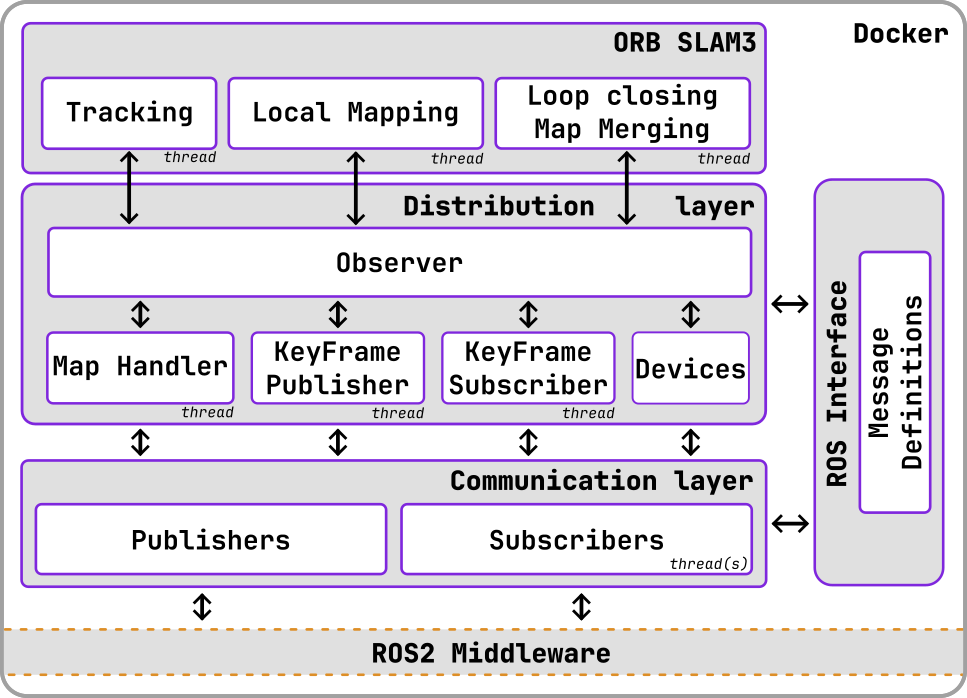
技术框架:该框架包含三层架构。第一层是感知层,负责从传感器获取数据,例如图像或点云。第二层是计算层,负责执行SLAM算法的各个模块,例如特征提取、跟踪、地图构建和优化。第三层是通信层,负责在各个设备之间进行数据交换和任务协调。该框架支持两种运行模式:完全分布式模式和单机模式。在完全分布式模式下,SLAM任务被分解并在多个设备上并行执行。在单机模式下,所有SLAM任务都在单个设备上执行。
关键创新:该框架的关键创新在于其自组织和分布式执行能力。与传统的客户端-服务器架构不同,该框架不需要中心服务器,各个设备可以自主地进行任务分配和数据交换。这种自组织的方式可以提高系统的鲁棒性和可扩展性。此外,该框架还具有设备无关性,可以运行在各种类型的边缘设备上。
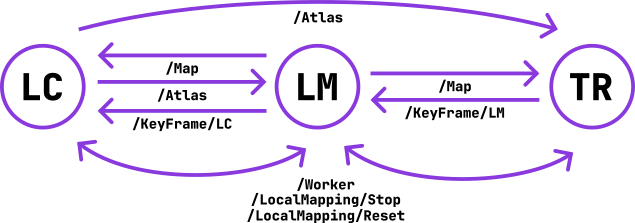
关键设计:该框架的设计重点在于任务分解和数据同步。SLAM任务被分解成多个独立的模块,每个模块可以在不同的设备上执行。为了保证数据的一致性,各个设备之间需要进行数据同步。本文采用了一种基于消息传递的同步机制,各个设备通过交换消息来更新其状态。具体的参数设置和损失函数取决于所使用的SLAM算法,本文以ORB SLAM3为例进行了实现和评估。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的自组织边缘计算框架在精度和资源利用率方面与单机ORB SLAM3相当。在分布式模式下,该框架能够有效地利用多个设备的计算资源,从而提高SLAM系统的整体性能。此外,实验还验证了该框架的鲁棒性,即使部分设备出现故障,系统仍然可以继续运行。
🎯 应用场景
该研究成果可应用于各种需要自主定位和建图的移动机器人场景,例如无人驾驶、仓储物流、巡检机器人等。通过将SLAM任务分布到多个边缘设备上执行,可以降低对单个设备的计算资源要求,提高系统的鲁棒性和可扩展性。此外,该框架还可以应用于智能城市、智慧工厂等领域,实现对环境的实时感知和监控。
📄 摘要(原文)
Localization within a known environment is a crucial capability for mobile robots. Simultaneous Localization and Mapping (SLAM) is a prominent solution to this problem. SLAM is a framework that consists of a diverse set of computational tasks ranging from real-time tracking to computation-intensive map optimization. This combination can present a challenge for resource-limited mobile robots. Previously, edge-assisted SLAM methods have demonstrated promising real-time execution capabilities by offloading heavy computations while performing real-time tracking onboard. However, the common approach of utilizing a client-server architecture for offloading is sensitive to server and network failures. In this article, we propose a novel edge-assisted SLAM framework capable of self-organizing fully distributed SLAM execution across a network of devices or functioning on a single device without connectivity. The architecture consists of three layers and is designed to be device-agnostic, resilient to network failures, and minimally invasive to the core SLAM system. We have implemented and demonstrated the framework for monocular ORB SLAM3 and evaluated it in both fully distributed and standalone SLAM configurations against the ORB SLAM3. The experiment results demonstrate that the proposed design matches the accuracy and resource utilization of the monolithic approach while enabling collaborative execution.