HydroelasticTouch: Simulation of Tactile Sensors with Hydroelastic Contact Surfaces
作者: David P. Leins, Florian Patzelt, Robert Haschke
分类: cs.RO
发布日期: 2025-01-14
💡 一句话要点
提出HydroelasticTouch,一种高效且真实的触觉传感器仿真方法,用于机器人操作任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉传感器仿真 流体弹性接触模型 机器人操作 MuJoCo sim-to-real迁移 触觉感知 物理仿真
📋 核心要点
- 现有触觉传感器仿真方法要么速度快但精度低,要么精度高但速度慢,难以兼顾。
- HydroelasticTouch利用流体弹性接触模型,在计算成本和物理真实感之间取得平衡,实现高效仿真。
- 通过零样本sim-to-real迁移实验,验证了该方法合成触觉数据的有效性,并开源了MuJoCo插件。
📝 摘要(中文)
随着低成本、高分辨率触觉传感器的发展,触觉感知在接触丰富的机器人操作任务中变得越来越重要。为了克服真实数据收集的限制,触觉研究领域涌现出多种触觉传感器仿真方法,以满足数据驱动方法对大量数据集的需求。这些仿真方法主要分为两类:快速但不精确的(软)点接触模型和慢速但精确的有限元建模。本文提出了一种新的方法,使用流体弹性接触模型来模拟基于压力的触觉传感器,该模型以合理的计算成本提供了高度的物理真实感。该模型为软-软和软-硬接触生成平滑的接触力,即使在非凸接触表面上也是如此。在接触表面的每个点近似压力值,并可以积分以计算传感器输出。我们通过对物体状态估计模型进行零样本sim-to-real迁移,验证了我们的模型合成真实触觉数据的能力。我们的仿真作为插件提供给基于MuJoCo的开源模拟器。
🔬 方法详解
问题定义:现有的触觉传感器仿真方法存在精度和效率的权衡问题。快速的点接触模型虽然计算效率高,但物理真实感不足,难以准确模拟复杂的接触情况。而有限元模型虽然精度高,但计算量大,难以应用于需要大量数据的机器学习任务中。因此,需要一种既能保证一定物理真实感,又能高效计算的触觉传感器仿真方法。
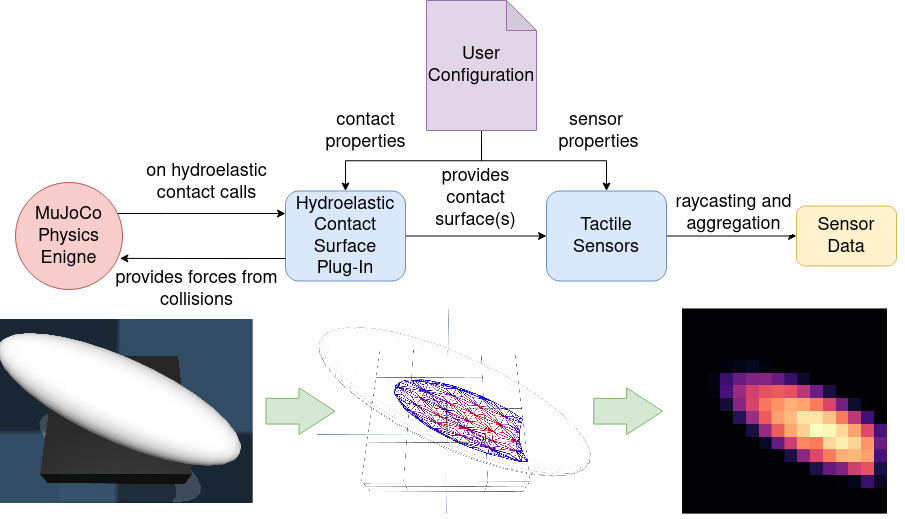
核心思路:本文的核心思路是利用流体弹性接触模型来模拟触觉传感器的接触过程。该模型将接触表面视为一个弹性体,内部充满流体。当物体接触时,弹性体会发生形变,流体压力会发生变化,从而产生接触力。通过计算流体压力分布,可以模拟触觉传感器的输出。
技术框架:HydroelasticTouch的整体框架包括以下几个主要步骤:1) 定义接触物体的几何形状和材料属性;2) 使用流体弹性接触模型计算接触表面的压力分布;3) 将压力分布映射到触觉传感器的输出;4) 使用仿真数据训练机器学习模型。该方法被实现为MuJoCo模拟器的插件,方便用户使用。
关键创新:HydroelasticTouch的关键创新在于使用了流体弹性接触模型来模拟触觉传感器的接触过程。与传统的点接触模型相比,该模型能够更准确地模拟软-软和软-硬接触,并能处理非凸接触表面。与有限元模型相比,该模型计算效率更高,更适合用于大规模仿真。
关键设计:在具体实现中,论文作者对流体弹性接触模型进行了简化,以提高计算效率。例如,他们假设流体是不可压缩的,并且忽略了流体的粘性。此外,他们还使用了一种高效的数值方法来求解流体压力分布。压力值在接触表面的每个点进行近似计算,然后积分以获得传感器输出。
🖼️ 关键图片


📊 实验亮点
论文通过零样本sim-to-real迁移实验验证了HydroelasticTouch的有效性。实验结果表明,使用仿真数据训练的物体状态估计模型可以直接应用于真实环境中,而无需进行额外的训练。这表明HydroelasticTouch能够生成足够真实的触觉数据,可以用于训练机器人。
🎯 应用场景
该研究成果可广泛应用于机器人操作、虚拟现实、人机交互等领域。例如,可以用于训练机器人进行抓取、装配等任务,也可以用于开发更逼真的虚拟触觉反馈系统。此外,该方法还可以用于设计新型触觉传感器,提高传感器的性能。
📄 摘要(原文)
Thanks to recent advancements in the development of inexpensive, high-resolution tactile sensors, touch sensing has become popular in contact-rich robotic manipulation tasks. With the surge of data-driven methods and their requirement for substantial datasets, several methods of simulating tactile sensors have emerged in the tactile research community to overcome real-world data collection limitations. These simulation approaches can be split into two main categories: fast but inaccurate (soft) point-contact models and slow but accurate finite element modeling. In this work, we present a novel approach to simulating pressure-based tactile sensors using the hydroelastic contact model, which provides a high degree of physical realism at a reasonable computational cost. This model produces smooth contact forces for soft-to-soft and soft-to-rigid contacts along even non-convex contact surfaces. Pressure values are approximated at each point of the contact surface and can be integrated to calculate sensor outputs. We validate our models' capacity to synthesize real-world tactile data by conducting zero-shot sim-to-real transfer of a model for object state estimation. Our simulation is available as a plug-in to our open-source, MuJoCo-based simulator.