Whole-Body Integrated Motion Planning for Aerial Manipulators
作者: Weiliang Deng, Hongming Chen, Biyu Ye, Haoran Chen, Ziliang Li, Ximin Lyu
分类: cs.RO
发布日期: 2025-01-11 (更新: 2025-09-29)
备注: 20 pages, 15 figures
💡 一句话要点
提出一种适用于复杂操作任务的无人机机械臂全身集成运动规划框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 无人机机械臂 运动规划 全身集成 轨迹优化 模仿学习
📋 核心要点
- 现有无人机机械臂运动规划方法难以兼顾任务多样性,尤其是在需要高难度动作时,缺乏有效的耦合轨迹规划。
- 该论文提出一种全身集成运动规划框架,通过灵活的航路点约束,同时优化无人机和机械臂的轨迹,实现复杂操作任务。
- 通过仿真和真实实验验证了该框架的有效性,成功演示了九种基本操作技能,证明了其在不同环境下的适应性。
📝 摘要(中文)
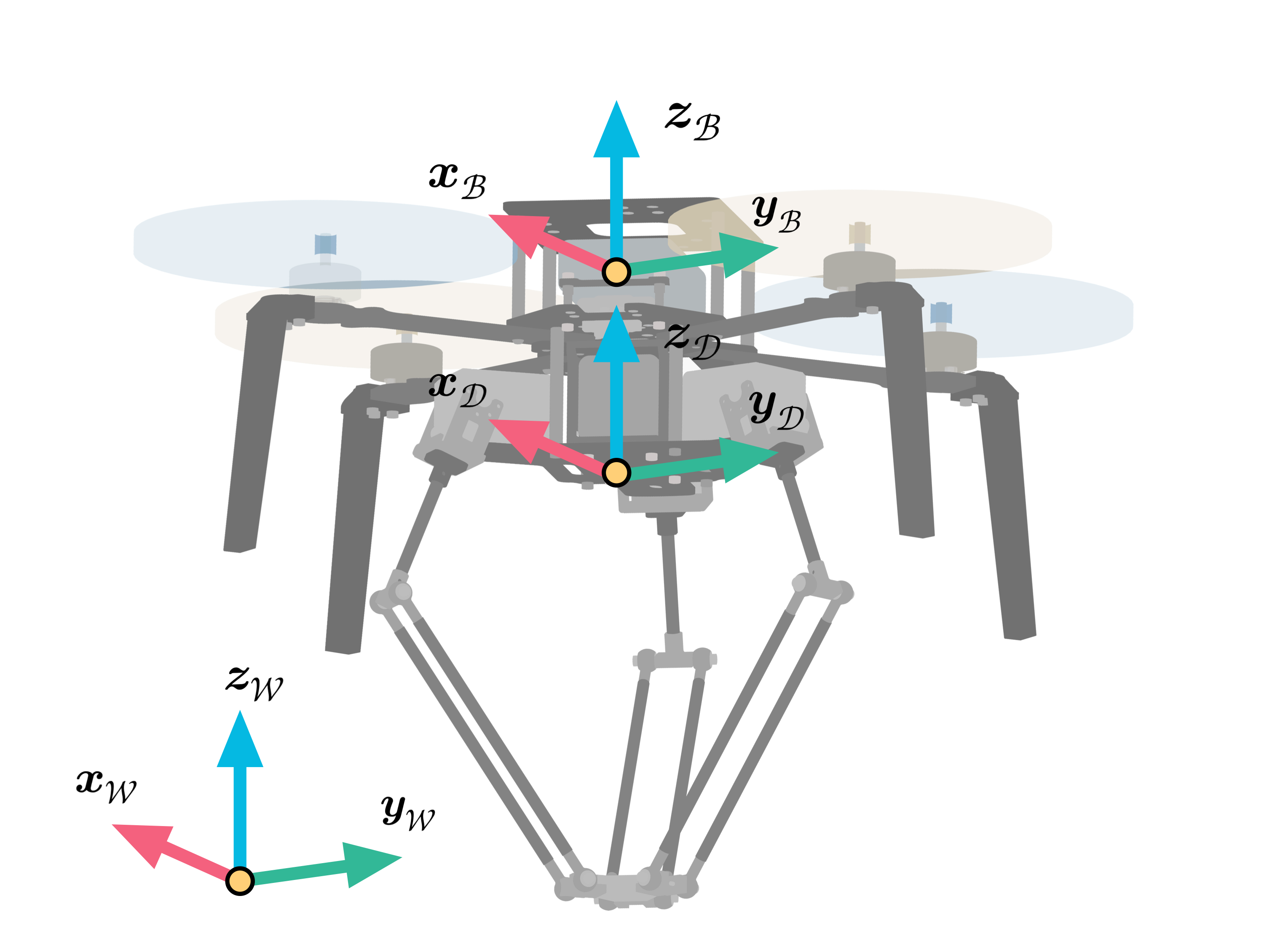
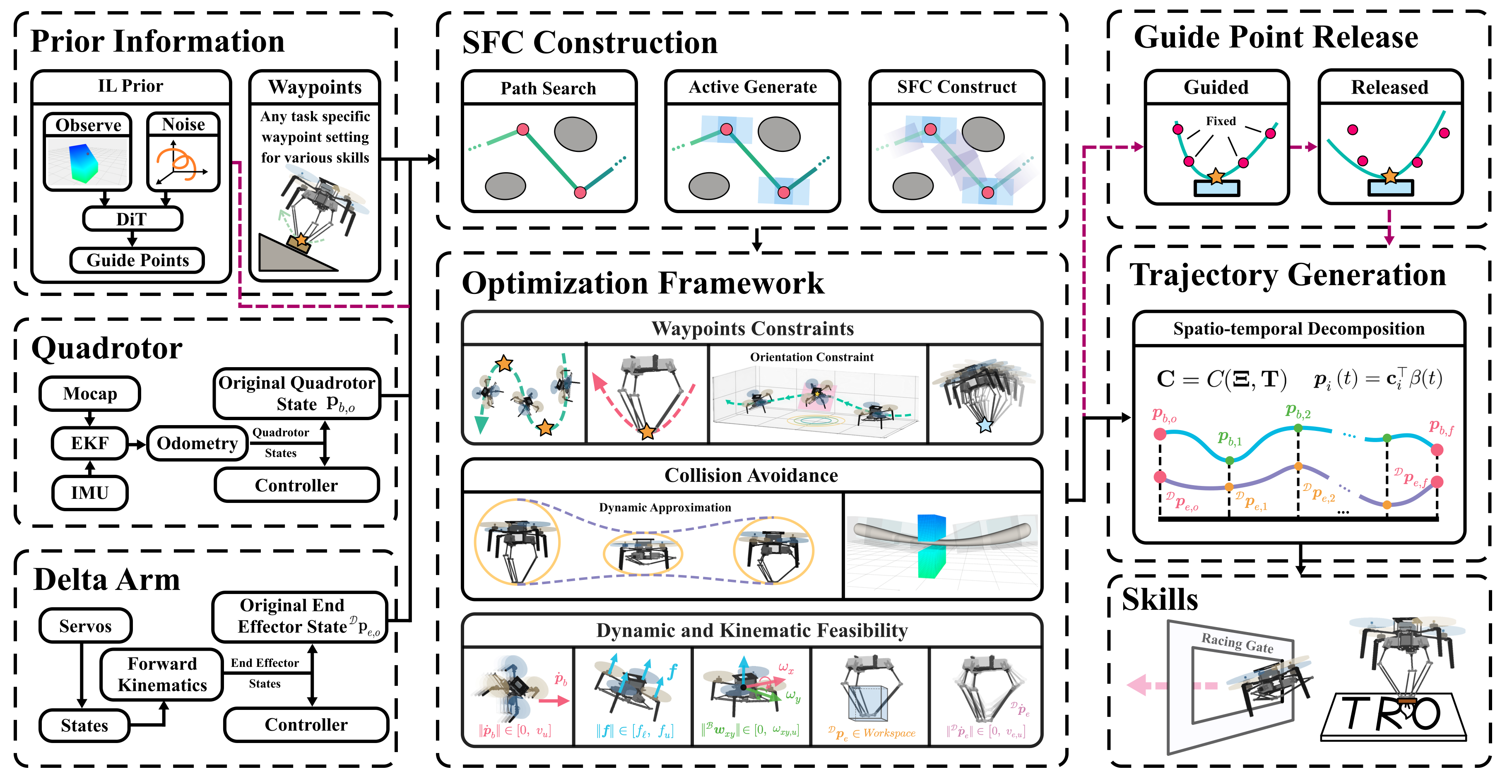
本文提出了一种用于无人机机械臂(AMs)的全身集成运动规划框架,旨在实现适应各种任务的耦合轨迹规划,尤其是在需要激烈机动的情况下。该框架利用灵活的航路点约束,为四旋翼飞行器或末端执行器指定单独的位置要求,并适应复杂操作任务所需的高阶速度和方向约束。通过利用时空轨迹特性,构建优化问题,生成四旋翼飞行器和机械臂的可行轨迹,同时确保避障、动态可行性和运动学可行性。此外,采用模仿学习(IL)来避免局部最优,从而提高特定任务的机动性。通过全面的仿真和实际实验验证了该框架的有效性,成功展示了各种环境中九种基本操作技能。
🔬 方法详解
问题定义:无人机机械臂在复杂环境下的操作任务,例如抓取、放置等,需要精确的运动控制和轨迹规划。现有的方法通常难以同时考虑无人机和机械臂的运动学、动力学约束以及环境的复杂性,容易陷入局部最优,导致规划失败或效率低下。尤其是在需要无人机进行剧烈机动时,规划难度进一步增加。
核心思路:论文的核心思路是将无人机和机械臂作为一个整体进行运动规划,通过优化无人机和机械臂的耦合轨迹,实现高效、稳定的操作。通过引入灵活的航路点约束,可以分别指定无人机和机械臂的位置、速度和姿态要求,从而适应不同的操作任务。同时,利用模仿学习来引导优化过程,避免陷入局部最优。
技术框架:该框架主要包含以下几个模块:1) 航路点约束生成模块:根据任务需求,生成无人机和机械臂的航路点约束,包括位置、速度、姿态等。2) 轨迹优化模块:基于航路点约束,构建优化问题,优化无人机和机械臂的轨迹,同时考虑运动学、动力学约束和避障要求。3) 模仿学习模块:利用专家轨迹数据,训练模仿学习模型,为轨迹优化提供初始轨迹,加速优化过程,避免局部最优。4) 轨迹执行模块:将优化后的轨迹发送给无人机和机械臂的控制器,实现精确的操作。
关键创新:该论文的关键创新在于:1) 提出了全身集成运动规划框架,能够同时优化无人机和机械臂的轨迹,实现高效、稳定的操作。2) 引入了灵活的航路点约束,可以分别指定无人机和机械臂的位置、速度和姿态要求,适应不同的操作任务。3) 利用模仿学习来引导优化过程,避免陷入局部最优,提高了规划的成功率和效率。与现有方法相比,该方法能够更好地处理复杂环境下的操作任务,尤其是在需要无人机进行剧烈机动时。
关键设计:在轨迹优化模块中,采用了基于梯度的优化算法,例如SQP(Sequential Quadratic Programming)。优化目标包括轨迹的平滑性、与航路点约束的接近程度、以及避障约束。模仿学习模块采用了行为克隆(Behavior Cloning)方法,利用专家轨迹数据训练神经网络,预测无人机和机械臂的控制量。损失函数包括控制量的均方误差和轨迹的距离误差。
🖼️ 关键图片

📊 实验亮点
通过仿真和真实实验,验证了该框架的有效性。在不同环境中,成功演示了九种基本操作技能,包括抓取、放置、推拉等。实验结果表明,该框架能够生成满足运动学、动力学约束的轨迹,并能够有效地避开障碍物。与传统方法相比,该框架能够显著提高操作的成功率和效率,尤其是在需要无人机进行剧烈机动时。
🎯 应用场景
该研究成果可应用于多种场景,例如:复杂环境下的物体抓取和放置、高空作业、灾难救援、以及工业自动化等。通过该框架,无人机机械臂可以更加灵活、高效地完成各种操作任务,提高工作效率,降低安全风险。未来,该技术有望在物流、建筑、农业等领域得到广泛应用。
📄 摘要(原文)
Expressive motion planning for Aerial Manipulators (AMs) is essential for tackling complex manipulation tasks, yet achieving coupled trajectory planning adaptive to various tasks remains challenging, especially for those requiring aggressive maneuvers. In this work, we propose a novel whole-body integrated motion planning framework for quadrotor-based AMs that leverages flexible waypoint constraints to achieve versatile manipulation capabilities. These waypoint constraints enable the specification of individual position requirements for either the quadrotor or end-effector, while also accommodating higher-order velocity and orientation constraints for complex manipulation tasks. To implement our framework, we exploit spatio-temporal trajectory characteristics and formulate an optimization problem to generate feasible trajectories for both the quadrotor and manipulator while ensuring collision avoidance considering varying robot configurations, dynamic feasibility, and kinematic feasibility. Furthermore, to enhance the maneuverability for specific tasks, we employ Imitation Learning (IL) to facilitate the optimization process to avoid poor local optima. The effectiveness of our framework is validated through comprehensive simulations and real-world experiments, where we successfully demonstrate nine fundamental manipulation skills across various environments.