Environment Modeling for Service Robots From a Task Execution Perspective
作者: Ying Zhang, Guohui Tian, Cui-Hua Zhang, Changchun Hua, Weili Ding, Choon Ki Ahn
分类: cs.RO
发布日期: 2025-01-10
备注: 16 pages, 9 figures; This article has been accepted for publication in a future issue of IEEE/CAA Journal of Automatica Sinica, but has not been fully edited. Content may change prior to final publication
期刊: IEEE/CAA Journal of Automatica Sinica, 2025
💡 一句话要点
面向任务执行的服务机器人环境建模综述,提升家庭服务机器人自主性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 服务机器人 环境建模 任务执行 定位 导航 操作 长期自主性 家庭环境
📋 核心要点
- 服务机器人在动态家庭环境中面临任务执行智能和长期自主性不足的挑战。
- 论文从任务执行角度综述环境建模,关注定位、导航、操作和长期自主性四个方面。
- 论文总结了现有方法的挑战,并指出了未来研究方向,为领域发展提供参考。
📝 摘要(中文)
服务机器人正日益走进家庭,为居民提供家务服务。然而,在开放、动态和非结构化的家庭环境中工作时,服务机器人仍然面临着任务执行智能不足和长期自主性(LTA)差等挑战,这限制了它们的部署。作为机器人任务执行的基础,环境建模已引起广泛关注。它集成了环境感知、理解和表示等核心技术,以准确识别环境信息。本文从一种新的面向任务执行的角度对环境建模进行了全面的综述。特别地,在机器人执行家庭服务任务的需求的指导下,我们系统地回顾了面向任务执行的环境建模在四个方面取得的进展:1)定位,2)导航,3)操作,以及4)长期自主性。讨论了当前的挑战,并强调了潜在的研究机会。
🔬 方法详解
问题定义:服务机器人在家庭环境中执行任务时,需要准确的环境模型以支持定位、导航、操作和长期自主性。现有方法在处理动态、非结构化环境以及实现长期自主性方面存在不足,例如,环境感知的鲁棒性、复杂环境下的路径规划、精确操作的实现以及长期环境变化的适应性等都是挑战。
核心思路:论文的核心思路是从任务执行的角度审视环境建模,强调环境模型需要服务于具体的任务需求。通过分析家庭服务机器人执行任务所需的关键能力,例如定位、导航、操作和长期自主性,来指导环境建模的研究方向。
技术框架:论文采用综述的形式,没有提出新的技术框架。其整体架构是围绕任务执行的四个关键方面(定位、导航、操作和长期自主性)展开,分别回顾了每个方面在环境建模方面的研究进展,并分析了现有方法的优缺点。
关键创新:论文的创新之处在于其视角,即从任务执行的角度来审视环境建模。以往的环境建模研究可能更侧重于环境的精确重建或语义理解,而本文强调环境模型需要服务于具体的任务需求,从而为环境建模的研究提供了新的方向。
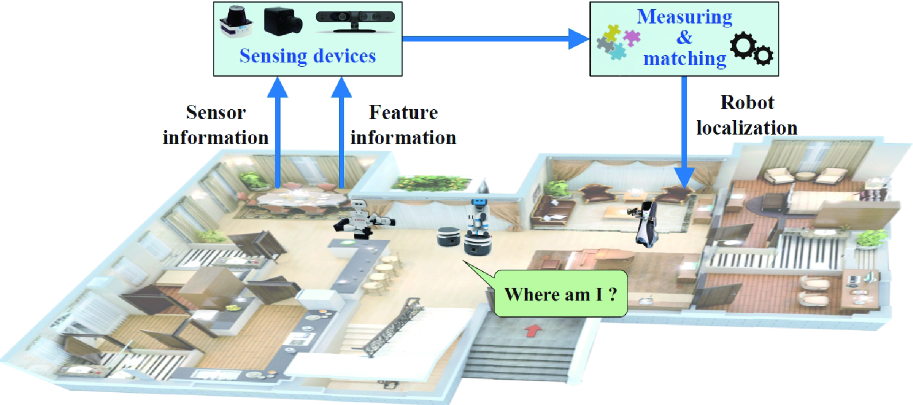
关键设计:由于是综述论文,没有具体的技术细节。但是,论文在每个章节都对相关的技术方法进行了总结和分析,例如,在定位方面,讨论了基于视觉的定位、基于激光雷达的定位等方法;在导航方面,讨论了基于栅格地图的导航、基于拓扑地图的导航等方法。
🖼️ 关键图片


📊 实验亮点
本文是一篇综述性文章,主要贡献在于对现有研究的系统性总结和分析,以及对未来研究方向的展望。没有提供具体的实验结果或性能数据。其亮点在于从任务执行的角度审视环境建模,为该领域的研究提供了新的视角。
🎯 应用场景
该研究对家庭服务机器人领域具有重要的应用价值。通过改进环境建模技术,可以提升服务机器人在家庭环境中的自主性和智能化水平,使其能够更好地完成家务服务、老人看护等任务。此外,该研究的思路也可以推广到其他服务机器人领域,例如医疗机器人、仓储机器人等。
📄 摘要(原文)
Service robots are increasingly entering the home to provide domestic tasks for residents. However, when working in an open, dynamic, and unstructured home environment, service robots still face challenges such as low intelligence for task execution and poor long-term autonomy (LTA), which has limited their deployment. As the basis of robotic task execution, environment modeling has attracted significant attention. This integrates core technologies such as environment perception, understanding, and representation to accurately recognize environmental information. This paper presents a comprehensive survey of environmental modeling from a new task-executionoriented perspective. In particular, guided by the requirements of robots in performing domestic service tasks in the home environment, we systematically review the progress that has been made in task-execution-oriented environmental modeling in four respects: 1) localization, 2) navigation, 3) manipulation, and 4) LTA. Current challenges are discussed, and potential research opportunities are also highlighted.