Semantic Mapping in Indoor Embodied AI -- A Survey on Advances, Challenges, and Future Directions
作者: Sonia Raychaudhuri, Angel X. Chang
分类: cs.RO, cs.CV
发布日期: 2025-01-10 (更新: 2025-08-10)
期刊: Transactions on Machine Learning Research. (ISSN) 2835-885. 2025-08
💡 一句话要点
综述:具身AI室内语义地图构建进展、挑战与未来方向
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身AI 语义地图 室内导航 机器人 环境理解
📋 核心要点
- 现有具身AI研究缺乏对室内语义地图构建的全面综述,阻碍了智能体在复杂环境中的长期任务规划。
- 该综述对室内语义地图构建方法进行了系统分类,并分析了不同方法的优缺点,为研究人员提供了清晰的路线图。
- 指出了开放词汇、可查询、任务无关的地图表示是未来发展趋势,同时也强调了内存和计算效率方面的挑战。
📝 摘要(中文)
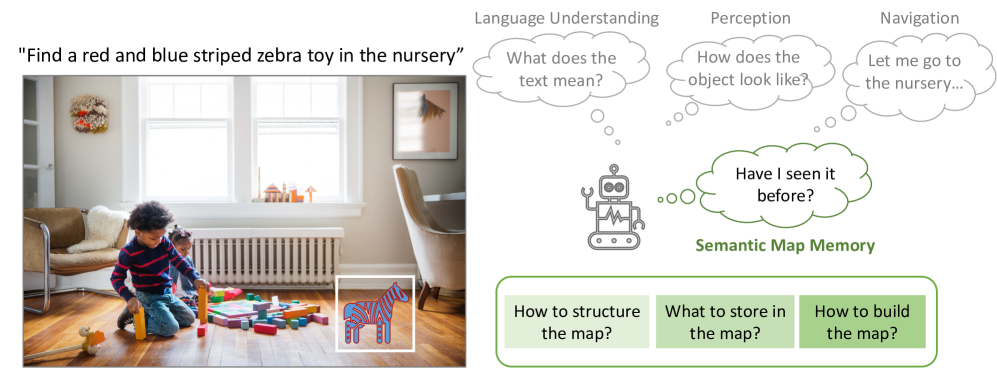
智能具身智能体(如机器人)需要在陌生的环境中执行复杂的语义任务。在智能体需要掌握的众多技能中,构建和维护环境的语义地图对于长时程任务至关重要。语义地图以结构化的方式捕获关于环境的信息,允许智能体在整个任务过程中参考它以进行高级推理。虽然现有的具身AI综述侧重于一般进展或特定任务(如导航和操作),但本文全面回顾了具身AI中语义地图构建方法,特别是针对室内导航。我们根据其结构表示(空间网格、拓扑图、密集点云或混合地图)和它们编码的信息类型(隐式特征或显式环境数据)对这些方法进行分类。我们还探讨了地图构建技术的优势和局限性,强调了当前的挑战,并提出了未来的研究方向。我们发现该领域正朝着开发开放词汇、可查询、任务无关的地图表示发展,而高内存需求和计算效率低下仍然是开放的挑战。本综述旨在指导当前和未来的研究人员推进具身AI系统的语义地图构建技术。
🔬 方法详解
问题定义:论文旨在解决具身AI在室内环境中构建语义地图的问题。现有方法在长期任务中面临挑战,例如地图表示不够灵活,难以适应新环境和新任务,同时计算和存储成本较高,限制了其在资源受限平台上的应用。
核心思路:论文的核心思路是对现有语义地图构建方法进行系统性的分类和分析,从而识别出当前研究的瓶颈和未来的发展方向。通过分析不同地图表示方法(如空间网格、拓扑图、点云)的优缺点,以及不同信息编码方式(如隐式特征、显式环境数据)的适用场景,为研究人员提供指导。
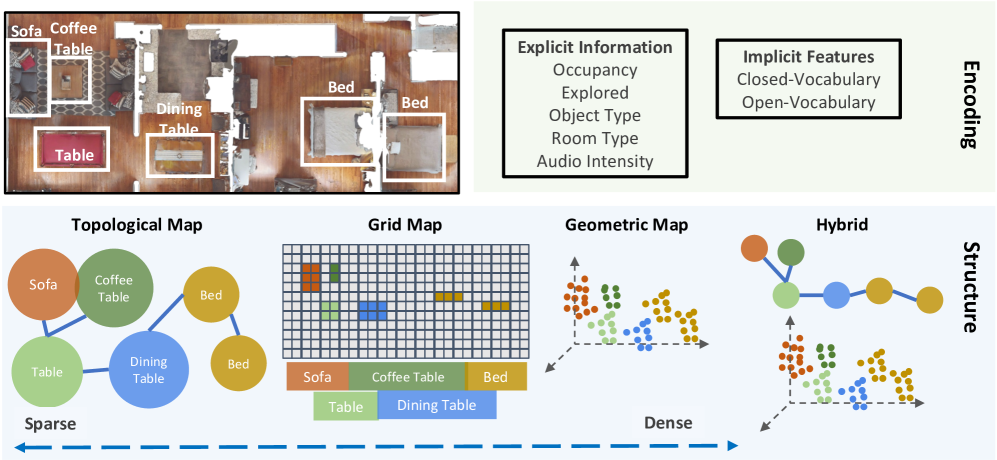
技术框架:该综述论文没有提出新的技术框架,而是对现有方法进行了梳理和总结。其技术框架体现在对现有方法的分类上,主要分为两个维度:一是地图的结构表示,包括空间网格、拓扑图、密集点云和混合地图;二是地图编码的信息类型,包括隐式特征和显式环境数据。
关键创新:该论文的关键创新在于其对现有语义地图构建方法的系统性分析和总结,以及对未来发展方向的展望。它不是提出一种新的算法或模型,而是通过对现有技术的梳理,为研究人员指明了未来的研究方向,例如开放词汇、可查询、任务无关的地图表示。
关键设计:该综述的关键设计在于其分类体系,它将现有方法按照结构表示和信息编码两个维度进行分类,从而能够更清晰地比较不同方法的优缺点。此外,该综述还对现有方法的局限性进行了深入分析,并提出了未来的研究方向,例如如何降低内存需求和提高计算效率。
🖼️ 关键图片
📊 实验亮点
该综述强调了当前语义地图构建技术面临的挑战,如高内存需求和计算效率低下,并指出未来研究方向是开发开放词汇、可查询、任务无关的地图表示。这些发现为未来的研究提供了重要的指导。
🎯 应用场景
该研究对具身AI在室内环境中的应用具有重要意义,例如家庭服务机器人、智能安防机器人、仓储物流机器人等。通过构建更高效、更灵活的语义地图,这些机器人能够更好地理解环境,完成更复杂的任务,并最终实现真正的智能化。
📄 摘要(原文)
Intelligent embodied agents (e.g. robots) need to perform complex semantic tasks in unfamiliar environments. Among many skills that the agents need to possess, building and maintaining a semantic map of the environment is most crucial in long-horizon tasks. A semantic map captures information about the environment in a structured way, allowing the agent to reference it for advanced reasoning throughout the task. While existing surveys in embodied AI focus on general advancements or specific tasks like navigation and manipulation, this paper provides a comprehensive review of semantic map-building approaches in embodied AI, specifically for indoor navigation. We categorize these approaches based on their structural representation (spatial grids, topological graphs, dense point-clouds or hybrid maps) and the type of information they encode (implicit features or explicit environmental data). We also explore the strengths and limitations of the map building techniques, highlight current challenges, and propose future research directions. We identify that the field is moving towards developing open-vocabulary, queryable, task-agnostic map representations, while high memory demands and computational inefficiency still remaining to be open challenges. This survey aims to guide current and future researchers in advancing semantic mapping techniques for embodied AI systems.