Assisting MoCap-Based Teleoperation of Robot Arm using Augmented Reality Visualisations
作者: Qiushi Zhou, Antony Chacon, Jiahe Pan, Wafa Johal
分类: cs.RO, cs.HC
发布日期: 2025-01-09
备注: 5 pages, 7 figures, accepted to HRI 2025
💡 一句话要点
利用增强现实可视化辅助基于动作捕捉的机器人手臂遥操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人遥操作 动作捕捉 增强现实 人机交互 可视化 机器人控制
📋 核心要点
- 现有机器人手臂遥操作方法缺乏直观性,操作员难以像控制自身手臂一样进行控制,方向和外观差异是主要挑战。
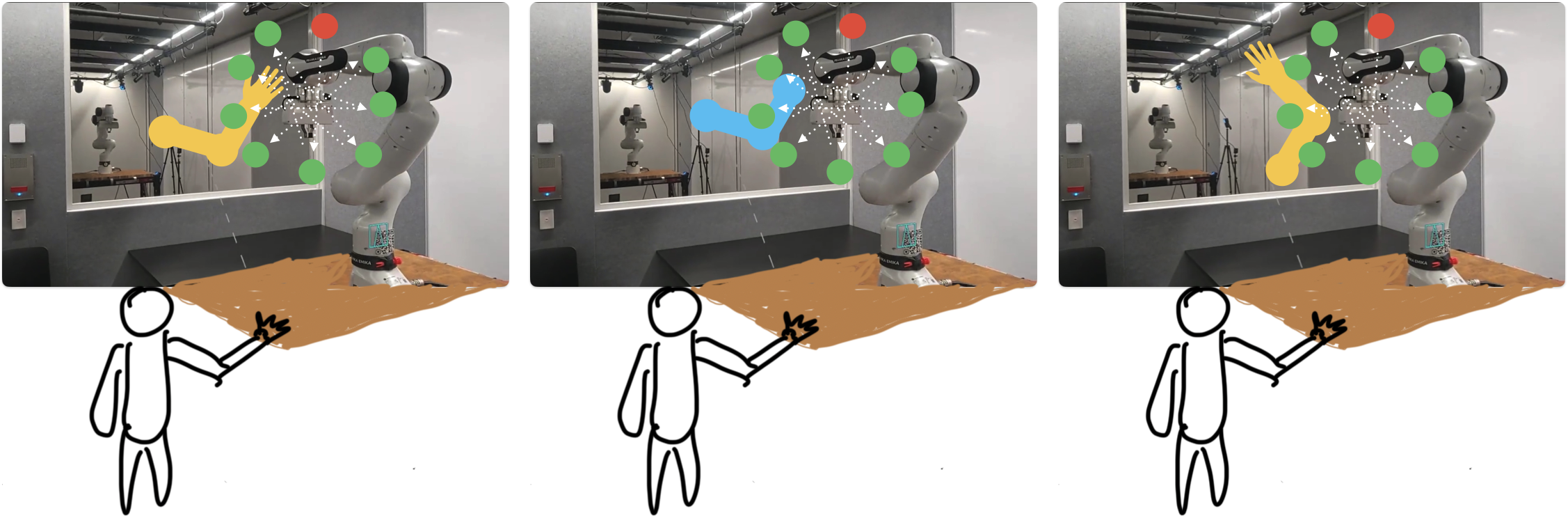
- 该论文提出利用增强现实技术,将人类手臂的虚拟参考叠加到机器人手臂上,帮助操作员理解运动映射关系。
- 实验表明,在机器人手臂上叠加方向一致的人形手臂AR,能够有效帮助用户学习和掌握机器人手臂的控制。
📝 摘要(中文)
本文探索了一种利用增强现实(AR)可视化辅助,通过动作捕捉(MoCap)遥操作机器人手臂的方法。机器人手臂的遥操作通常需要操作员定位末端执行器或编程每个关节。与人类可以通过视觉和本体感觉反馈轻松控制自己的手臂不同,由于机器人手臂的方向和外观不一致,以相同方式控制外部机器人手臂具有挑战性。本文研究了AR如何通过可视化人类手臂的虚拟参考,帮助用户理解运动映射,从而辅助遥操作。研究发现,在机器人上叠加方向一致的人形手臂AR,有助于用户学习控制。最后,讨论了基于MoCap的机器人遥操作的研究结果和未来工作。
🔬 方法详解
问题定义:机器人手臂遥操作的难点在于操作员难以直观地理解人类手臂动作与机器人手臂运动之间的映射关系。现有的遥操作方法,例如直接控制末端执行器或编程关节,缺乏自然性和直观性,使得操作员难以像控制自己的手臂一样控制机器人手臂。方向和外观的差异进一步加剧了这一问题。
核心思路:该论文的核心思路是利用增强现实(AR)技术,在操作员的视野中叠加一个与人类手臂运动同步的虚拟参考手臂。通过将虚拟手臂与机器人手臂对齐,操作员可以更直观地理解运动映射关系,从而更轻松地控制机器人手臂。这种方法旨在弥合人类直觉与机器人控制之间的差距。
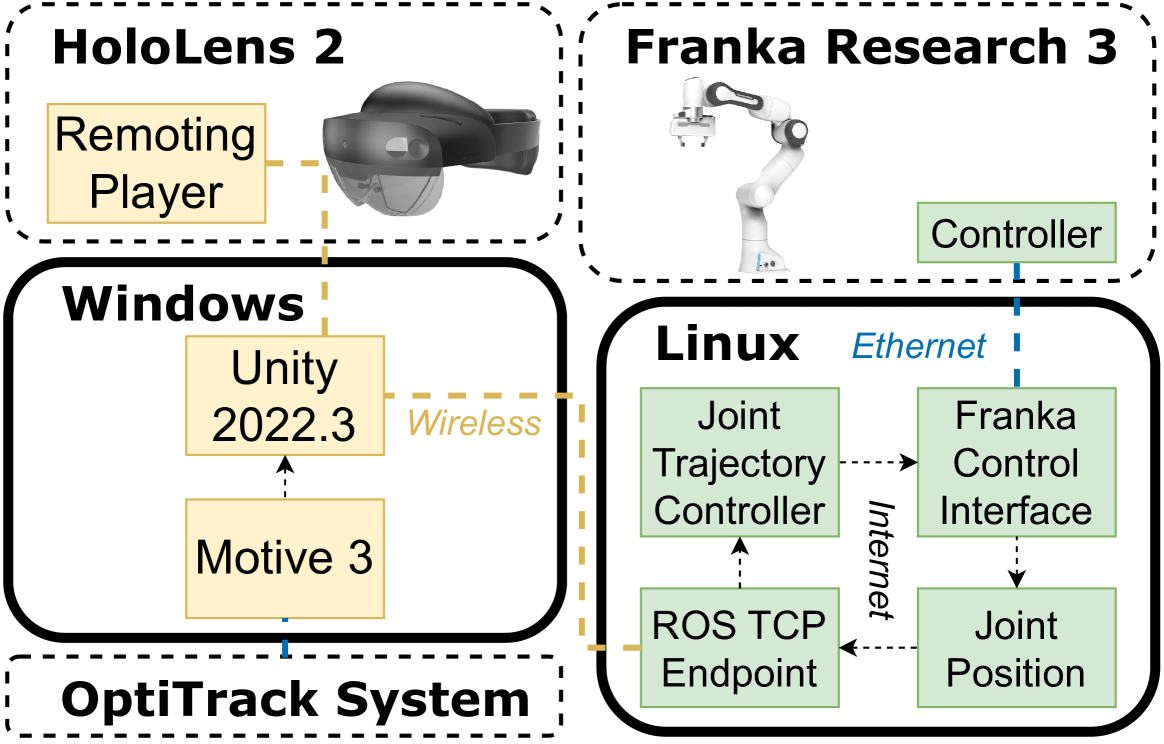
技术框架:该系统的整体框架包括三个主要部分:动作捕捉(MoCap)系统、机器人手臂控制系统和增强现实(AR)可视化系统。首先,动作捕捉系统跟踪操作员手臂的运动。然后,这些运动数据被映射到机器人手臂的控制指令。最后,AR可视化系统将虚拟参考手臂叠加到操作员的视野中,与机器人手臂同步运动。
关键创新:该论文的关键创新在于将增强现实技术应用于机器人手臂遥操作,并利用虚拟参考手臂来改善操作员对运动映射的理解。与传统的遥操作方法相比,该方法提供了一种更直观、更自然的操作界面,降低了操作难度,提高了操作效率。
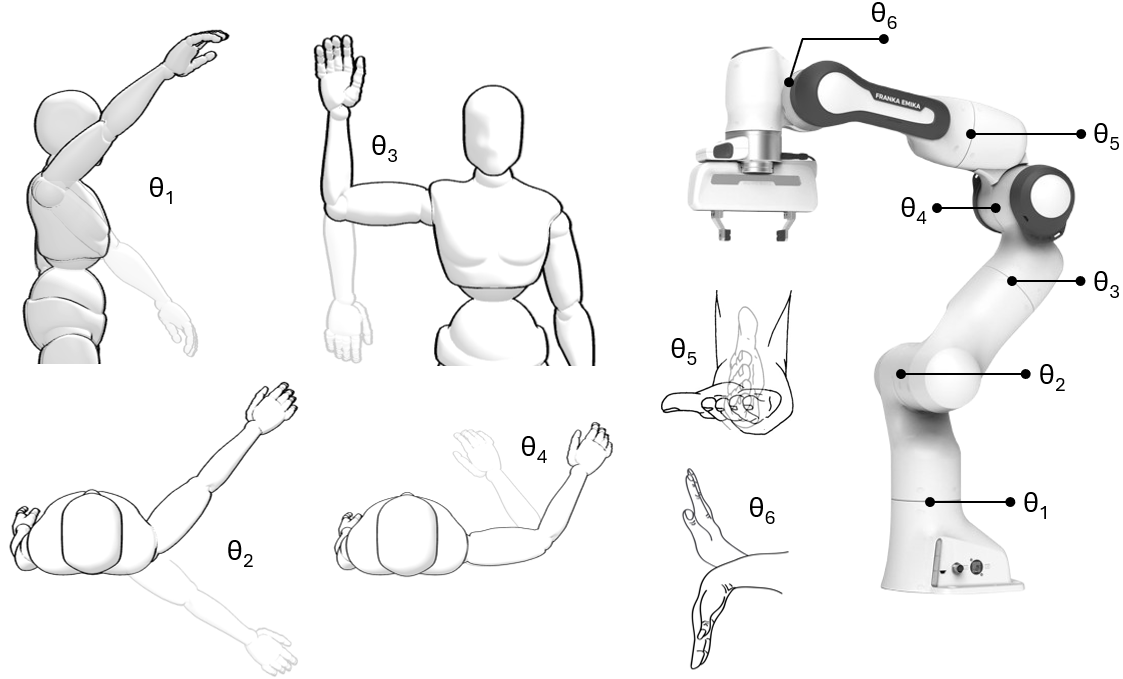
关键设计:AR可视化系统的关键设计在于虚拟参考手臂的呈现方式。论文中提到,将人形手臂以与机器人手臂相同的方向叠加,能够更好地帮助用户学习控制。具体的参数设置和网络结构等技术细节在摘要中没有提及,属于未知信息。
🖼️ 关键图片
📊 实验亮点
摘要中提到,实验结果表明,在机器人手臂上叠加方向一致的人形手臂AR,能够有效帮助用户学习控制。具体的性能数据、对比基线和提升幅度等详细实验结果在摘要中没有给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种需要远程操作的场景,例如危险环境下的作业、医疗手术辅助、以及工业自动化等。通过提供更直观、更易于使用的遥操作界面,可以降低操作员的培训成本,提高操作效率和安全性。未来,该技术有望进一步发展,实现更复杂、更精细的机器人控制。
📄 摘要(原文)
Teleoperating a robot arm involves the human operator positioning the robot's end-effector or programming each joint. Whereas humans can control their own arms easily by integrating visual and proprioceptive feedback, it is challenging to control an external robot arm in the same way, due to its inconsistent orientation and appearance. We explore teleoperating a robot arm through motion-capture (MoCap) of the human operator's arm with the assistance of augmented reality (AR) visualisations. We investigate how AR helps teleoperation by visualising a virtual reference of the human arm alongside the robot arm to help users understand the movement mapping. We found that the AR overlay of a humanoid arm on the robot in the same orientation helped users learn the control. We discuss findings and future work on MoCap-based robot teleoperation.