Understanding Expectations for a Robotic Guide Dog for Visually Impaired People
作者: J. Taery Kim, Morgan Byrd, Jack L. Crandell, Bruce N. Walker, Greg Turk, Sehoon Ha
分类: cs.RO
发布日期: 2025-01-08
备注: 12 pages, 4 figures, Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI'25)
💡 一句话要点
通过用户研究探索视障人士对导盲机器人的期望与设计启示
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 导盲机器人 视障人士 用户研究 人机交互 机器人设计
📋 核心要点
- 现有导盲机器人设计缺乏系统性研究,尤其在步态控制、导航行为、交互方式和语音解释等方面。
- 通过用户研究,收集视障人士对导盲机器人的期望和偏好,为机器人设计提供指导。
- 研究揭示了用户对控制器类型、交互方式、导航策略等方面的偏好,并强调了定制化的重要性。
📝 摘要(中文)
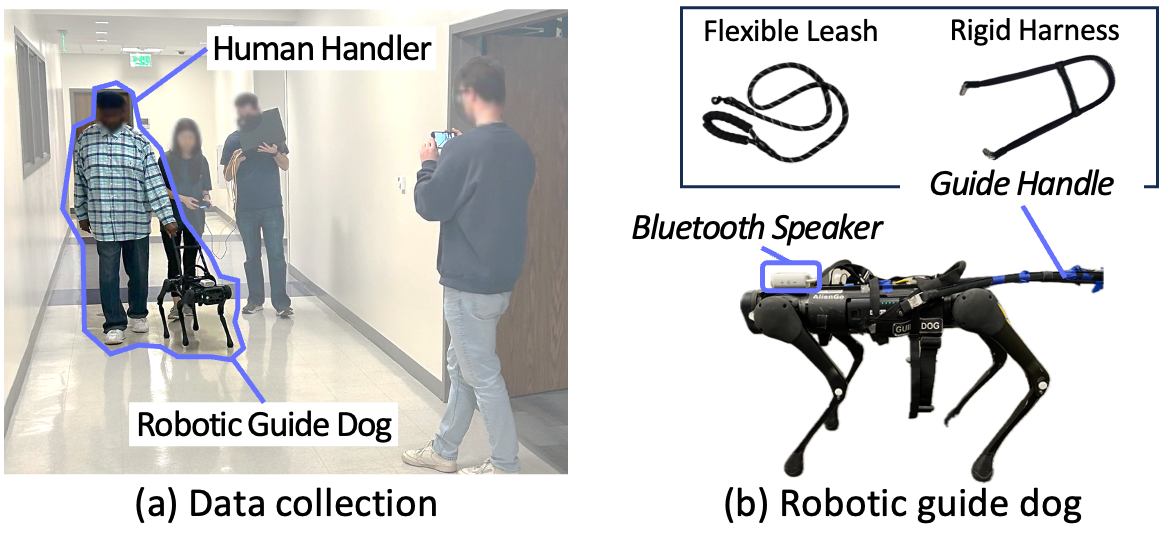
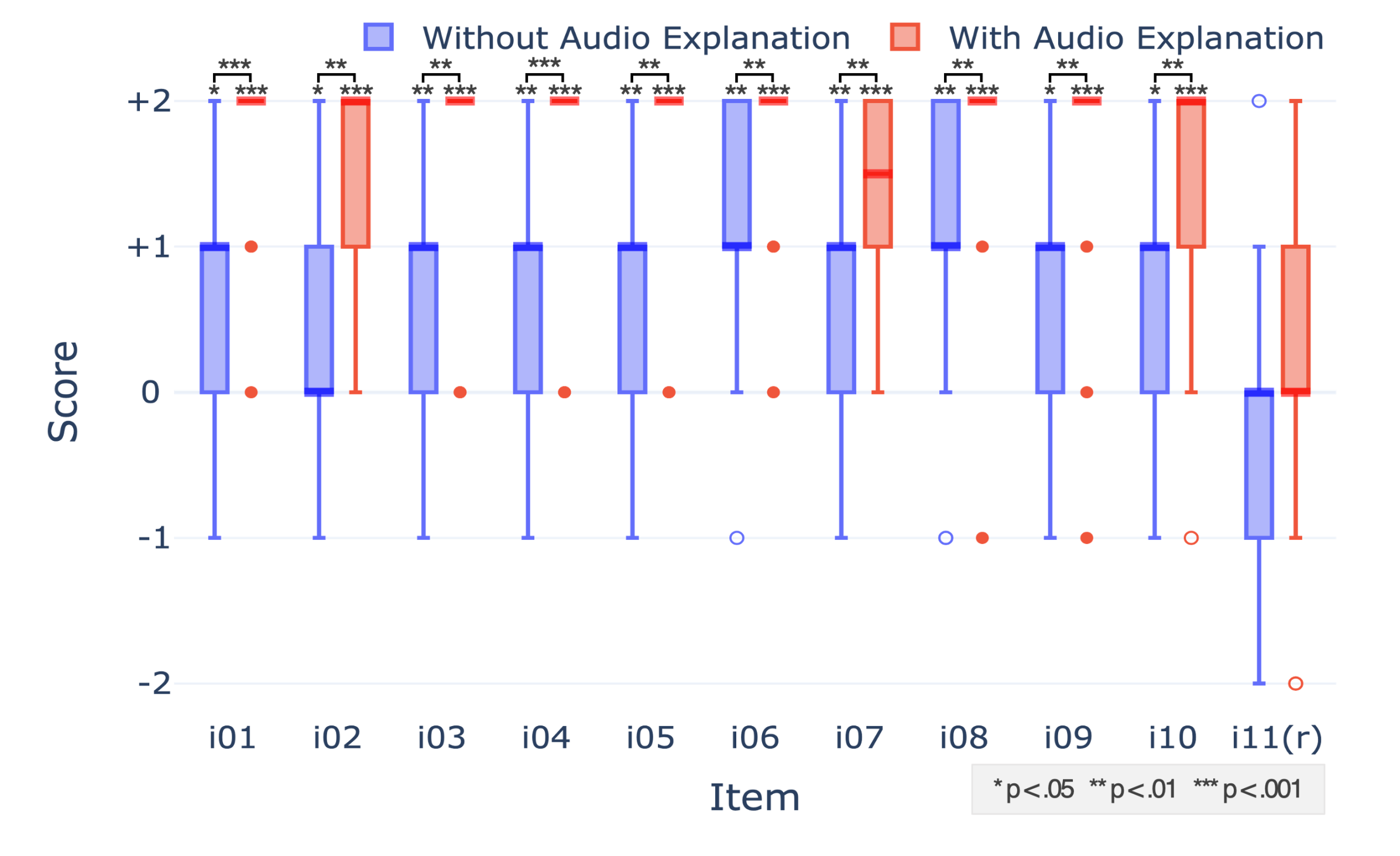
本研究旨在探索导盲机器人的设计方向,以提升视障人士的自主性和移动能力。通过对18位视障人士(包括15位盲杖使用者和3位导盲犬使用者)进行用户研究,收集他们与四足机器人的交互反馈,包括定量和定性数据。研究结果揭示了若干设计要点,例如偏好基于学习的控制器和刚性手柄,非对称速度的渐进式转弯,语义通信方法和可解释性。此外,研究强调了根据用户背景和偏好进行定制的重要性,以及电池寿命、维护和天气问题等实际考虑。这些发现为导盲机器人的未来研究和开发提供了有价值的见解和设计启示。
🔬 方法详解
问题定义:现有导盲机器人在设计上缺乏对用户需求的系统性理解,尤其是在步态控制、导航行为、交互方式和语音解释等方面。这导致机器人难以满足视障人士的实际需求,限制了其应用范围和用户体验。现有方法往往侧重于技术实现,而忽略了用户的主观感受和个性化需求。
核心思路:本研究的核心思路是通过用户研究,直接从视障人士那里收集他们对导盲机器人的期望和偏好。通过让用户与四足机器人进行交互,并收集他们的定量和定性反馈,从而了解用户对不同设计方案的接受程度和改进建议。这种以用户为中心的设计方法旨在确保机器人能够真正满足用户的需求,并提供安全、可靠和舒适的导航体验。
技术框架:本研究的技术框架主要包括以下几个阶段:1) 招募视障人士作为研究参与者;2) 让参与者与四足机器人进行交互,完成特定的导航任务;3) 通过问卷调查、访谈和观察等方式,收集参与者的反馈数据;4) 对收集到的数据进行分析,提取设计要点和改进建议。研究重点关注用户对机器人控制方式、交互方式、导航策略和可解释性的偏好。
关键创新:本研究的关键创新在于其以用户为中心的设计方法。与传统的以技术为中心的设计方法不同,本研究将用户需求放在首位,通过用户研究来指导机器人设计。这种方法能够确保机器人能够真正满足用户的需求,并提供更好的用户体验。此外,研究还揭示了用户对导盲机器人的一些具体期望,例如偏好基于学习的控制器和刚性手柄,非对称速度的渐进式转弯,语义通信方法和可解释性。
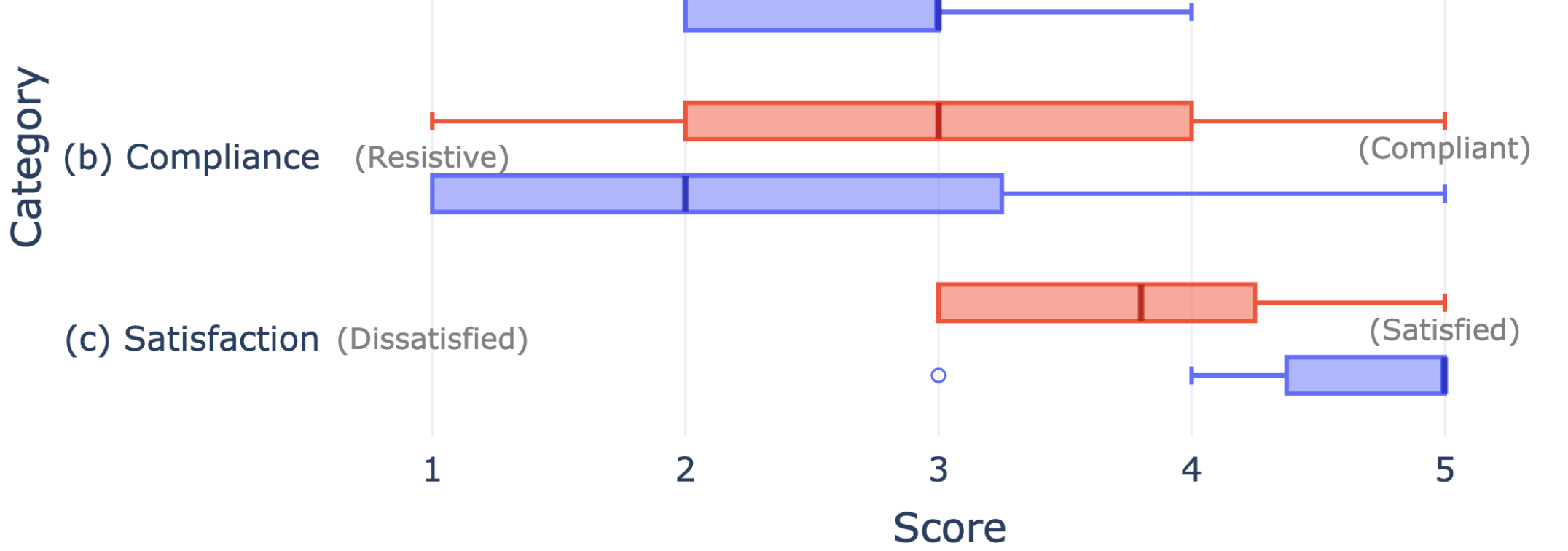
关键设计:研究中涉及的关键设计包括:1) 机器人控制器的选择,研究发现用户更偏好基于学习的控制器,因为这种控制器能够更好地适应不同的地形和环境;2) 交互方式的设计,研究发现用户更喜欢刚性手柄,因为这种手柄能够提供更好的稳定性和控制感;3) 导航策略的设计,研究发现用户更喜欢非对称速度的渐进式转弯,因为这种转弯方式更加平稳和舒适;4) 通信方式的设计,研究发现用户更喜欢语义通信方法,因为这种方法能够提供更清晰和易于理解的信息。
🖼️ 关键图片
📊 实验亮点
研究发现,视障人士更偏好基于学习的控制器,认为其能更好适应复杂环境。他们也倾向于使用刚性手柄,以获得更强的控制感。此外,非对称速度的渐进式转弯和语义通信方式也更受青睐。这些发现为导盲机器人的设计提供了明确的方向。
🎯 应用场景
该研究成果可应用于导盲机器人的设计与开发,提升视障人士的出行自主性和安全性。研究结果可指导工程师设计更符合用户需求的导盲机器人,例如更智能的导航系统、更自然的交互方式和更可靠的硬件结构。此外,该研究方法也可推广到其他辅助技术的设计中,促进残疾人辅助技术的进步。
📄 摘要(原文)
Robotic guide dogs hold significant potential to enhance the autonomy and mobility of blind or visually impaired (BVI) individuals by offering universal assistance over unstructured terrains at affordable costs. However, the design of robotic guide dogs remains underexplored, particularly in systematic aspects such as gait controllers, navigation behaviors, interaction methods, and verbal explanations. Our study addresses this gap by conducting user studies with 18 BVI participants, comprising 15 cane users and three guide dog users. Participants interacted with a quadrupedal robot and provided both quantitative and qualitative feedback. Our study revealed several design implications, such as a preference for a learning-based controller and a rigid handle, gradual turns with asymmetric speeds, semantic communication methods, and explainability. The study also highlighted the importance of customization to support users with diverse backgrounds and preferences, along with practical concerns such as battery life, maintenance, and weather issues. These findings offer valuable insights and design implications for future research and development of robotic guide dogs.