Cyber-Physical Steganography in Robotic Motion Control
作者: Ching-Chun Chang, Yijie Lin, Isao Echizen
分类: cs.RO, cs.AI, cs.CR
发布日期: 2025-01-08
💡 一句话要点
提出一种基于机器人运动控制的隐写术,用于秘密信息传输。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人运动控制 隐写术 信息隐藏 网络安全 物理世界交互
📋 核心要点
- 传统隐写术主要集中在视觉、听觉和语言领域,缺乏对物理世界交互的探索。
- 该论文提出一种新颖的隐写术,通过控制机器人对环境刺激的响应来编码和解码信息。
- 实验在模拟环境中验证了该方法的可行性,并考虑了机器人安全和运动偏差的约束。
📝 摘要(中文)
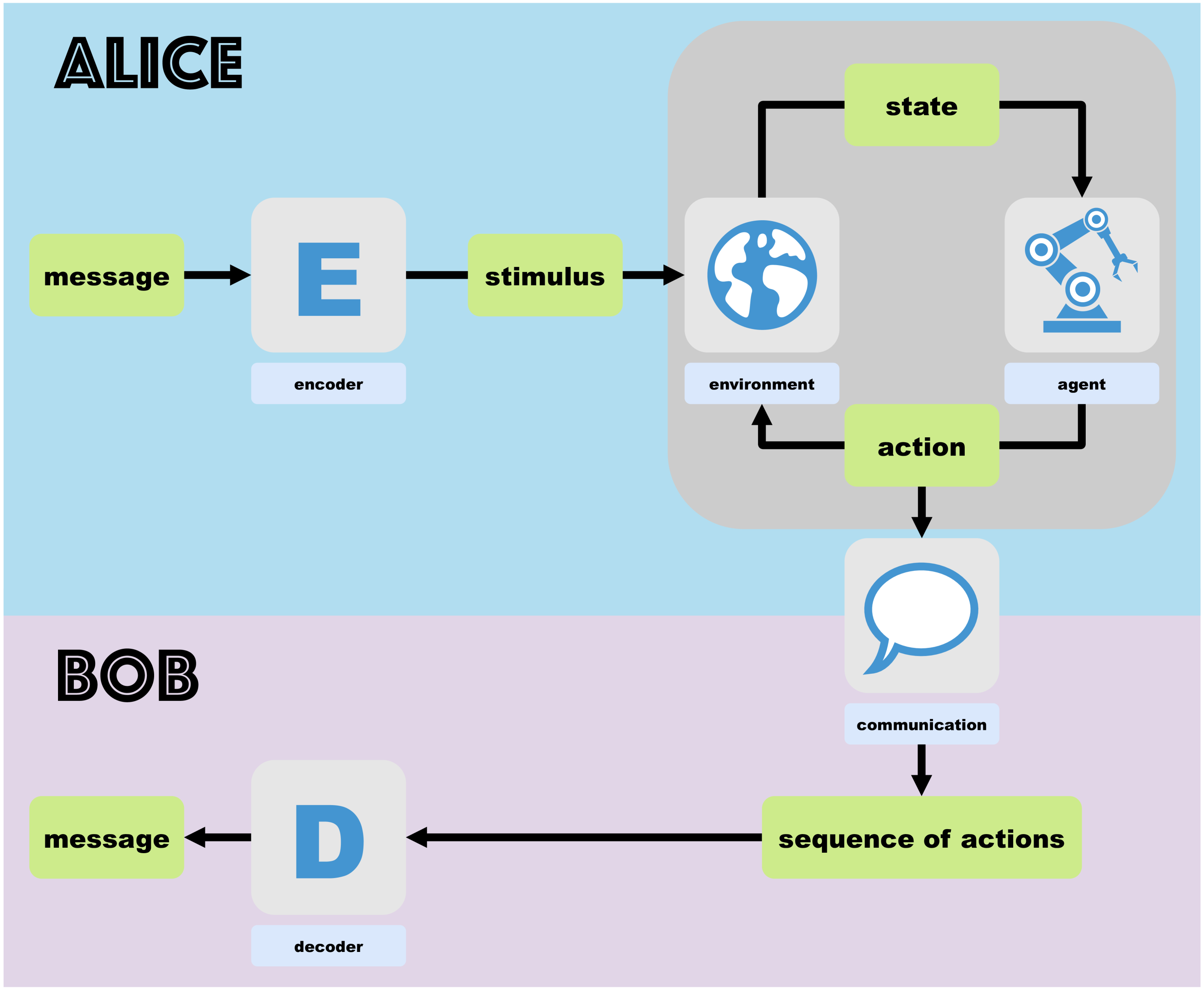
隐写术作为一种信息隐藏技术,不断在视觉、听觉和语言领域发展,适应隐写隐藏和隐写分析之间持续的博弈。本研究旨在通过在机器人运动控制中引入隐写范式,来扩展可行隐写媒介的范围。基于机器人对环境变化的固有敏感性,我们提出了一种方法,将消息编码为影响机器人运动的环境刺激,并从生成的运动轨迹中解码消息。最大化机器人完整性和最小化运动偏差被确立为保密的基本原则。作为概念验证,我们在模拟环境中针对各种操作任务进行了实验,采用了配备通用多模态策略的机器人。
🔬 方法详解
问题定义:现有隐写术主要集中在数字媒体领域,缺乏对物理世界交互的探索。在机器人运动控制中进行隐写,需要解决如何在不影响机器人正常工作的前提下,将秘密信息嵌入到机器人的运动轨迹中,并且保证信息的安全性和可靠性。现有方法难以兼顾机器人安全、运动自然性和信息隐藏容量。
核心思路:该论文的核心思路是利用机器人对环境刺激的敏感性,将秘密信息编码为环境刺激,这些刺激会影响机器人的运动轨迹。通过分析机器人的运动轨迹,可以解码出隐藏的信息。这种方法的核心在于找到一种合适的编码方式,使得环境刺激对机器人运动的影响既能被精确控制,又能保证信息的隐蔽性。
技术框架:该方法包含以下几个主要阶段:1) 信息编码:将秘密信息转换为一系列环境刺激参数。2) 运动规划:根据环境刺激参数,生成机器人的运动轨迹。3) 运动执行:机器人执行规划的运动轨迹。4) 信息解码:通过分析机器人的运动轨迹,提取出环境刺激参数,并解码出秘密信息。整个框架的关键在于运动规划阶段,需要保证运动轨迹既能反映环境刺激参数,又能满足机器人的运动约束。
关键创新:该论文最重要的技术创新点是将隐写术的概念扩展到了机器人运动控制领域,提出了一种全新的信息隐藏和传输方式。与传统的数字媒体隐写术相比,该方法利用了物理世界的交互特性,具有更高的隐蔽性和安全性。此外,该方法还考虑了机器人安全和运动自然性的约束,使得隐写过程不会对机器人的正常工作产生影响。
关键设计:论文中关键的设计包括:1) 环境刺激参数的选择:需要选择对机器人运动有显著影响,但又不会引起注意的环境参数,例如光照强度、声音频率等。2) 运动规划算法的设计:需要设计一种能够根据环境刺激参数生成运动轨迹的算法,同时保证运动轨迹的平滑性和安全性。3) 信息编码和解码方案的设计:需要设计一种高效的编码和解码方案,使得秘密信息能够被可靠地隐藏和提取。
🖼️ 关键图片

📊 实验亮点
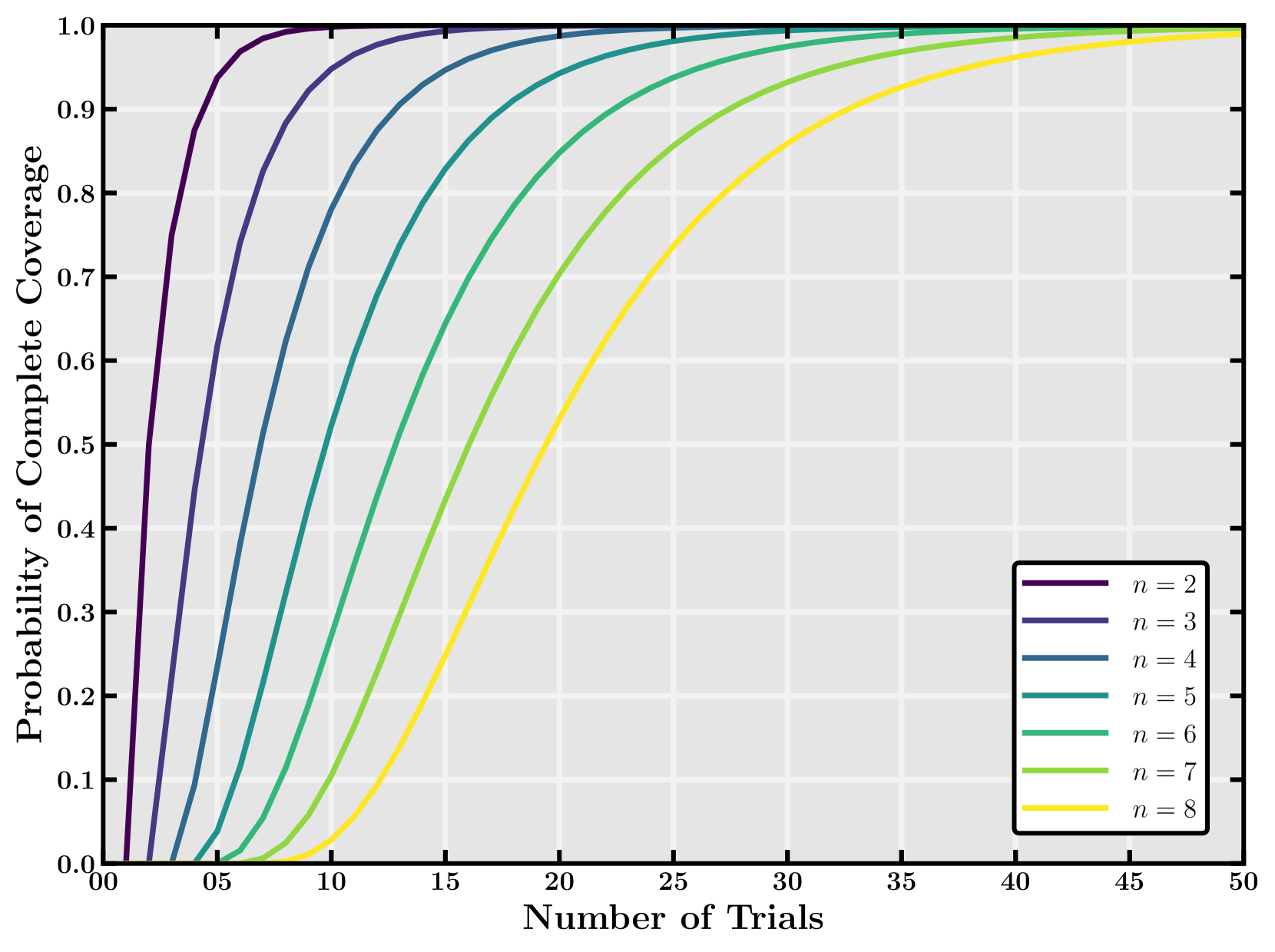
论文通过在模拟环境中进行实验,验证了所提出方法的可行性。实验结果表明,该方法能够在保证机器人安全和运动自然性的前提下,成功地将秘密信息嵌入到机器人的运动轨迹中,并能够准确地解码出隐藏的信息。虽然论文没有给出具体的性能数据,但实验结果表明该方法具有一定的实用价值。
🎯 应用场景
该研究成果可应用于安全通信、工业间谍、以及需要隐蔽信息传输的场景。例如,在工业自动化领域,可以通过控制机器人的运动轨迹来秘密传输生产指令或质量检测数据。在军事领域,可以用于控制无人机的飞行轨迹来传递情报信息。此外,该技术还可以用于保护机器人的知识产权,防止恶意篡改。
📄 摘要(原文)
Steganography, the art of information hiding, has continually evolved across visual, auditory and linguistic domains, adapting to the ceaseless interplay between steganographic concealment and steganalytic revelation. This study seeks to extend the horizons of what constitutes a viable steganographic medium by introducing a steganographic paradigm in robotic motion control. Based on the observation of the robot's inherent sensitivity to changes in its environment, we propose a methodology to encode messages as environmental stimuli influencing the motions of the robotic agent and to decode messages from the resulting motion trajectory. The constraints of maximal robot integrity and minimal motion deviation are established as fundamental principles underlying secrecy. As a proof of concept, we conduct experiments in simulated environments across various manipulation tasks, incorporating robotic embodiments equipped with generalist multimodal policies.