OpenIN: Open-Vocabulary Instance-Oriented Navigation in Dynamic Domestic Environments
作者: Yujie Tang, Meiling Wang, Yinan Deng, Zibo Zheng, Jingchuan Deng, Yufeng Yue
分类: cs.RO
发布日期: 2025-01-08
备注: arXiv admin note: substantial text overlap with arXiv:2409.18743
💡 一句话要点
提出OpenIN,解决动态家庭环境中面向实例的开放词汇导航问题
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人导航 开放词汇 实例导航 动态环境 场景图 大型语言模型 视觉语言 家庭服务机器人
📋 核心要点
- 现有物体导航方法侧重语义层面,无法动态更新场景表示,难以应对日常家庭环境中物体位置和载体的频繁变化。
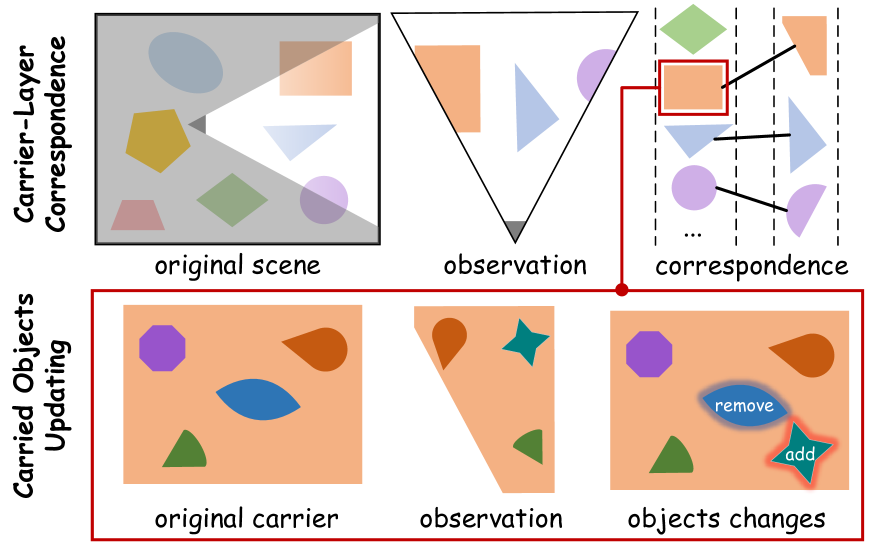
- 构建开放词汇的载体关系场景图(CRSG),动态更新载运状态,结合大型语言模型的常识知识和视觉-语言特征相似性进行导航。
- 在Habitat模拟器和真实机器人上验证了算法的有效性,证明了其在动态环境中导航到移动目标的能力。
📝 摘要(中文)
在日常家庭环境中,诸如杯子等常用物品的位置经常不固定,同一类别下存在多个实例,且其载体也经常变化。这使得机器人难以高效地导航到特定实例。为了解决这一挑战,机器人必须捕获并更新场景变化并持续规划。然而,当前的物体导航方法主要关注语义层面,缺乏动态更新场景表示的能力。本文旨在捕获常用物体与其静态载体之间的关系,构建了一个开放词汇的载体关系场景图(CRSG),并在机器人导航过程中更新载运状态,以反映场景的动态变化。基于CRSG,我们进一步提出了一种实例导航策略,将导航过程建模为马尔可夫决策过程。在每一步,决策都由大型语言模型的常识知识和视觉-语言特征相似性提供信息。我们在Habitat模拟器中为常用的日常物品设计了一系列长序列导航任务。结果表明,通过更新CRSG,机器人可以有效地导航到移动的目标。此外,我们将算法部署在真实机器人上,并验证了其在实际应用中的有效性。
🔬 方法详解
问题定义:论文旨在解决动态家庭环境中,机器人如何高效导航到特定实例的问题。现有方法主要关注物体语义层面的导航,忽略了物体位置和载体的动态变化,导致机器人难以适应真实场景的复杂性。例如,杯子可能不在固定的位置,而是在桌子上、洗碗机里,甚至被人拿着移动。现有方法无法有效处理这些动态变化,导致导航效率低下甚至失败。
核心思路:论文的核心思路是构建一个能够动态更新的场景表示,即载体关系场景图(CRSG)。CRSG不仅包含物体的位置信息,还包含物体与其载体之间的关系。通过在导航过程中不断更新CRSG,机器人可以感知场景的动态变化,并据此调整导航策略。此外,论文还利用大型语言模型的常识知识和视觉-语言特征相似性来辅助导航决策,提高导航的准确性和效率。
技术框架:整体框架包含以下几个主要模块:1) 场景感知模块:负责感知环境,识别物体及其载体,并构建初始的CRSG。2) CRSG更新模块:在导航过程中,不断更新CRSG,反映场景的动态变化。3) 导航策略模块:基于CRSG,利用大型语言模型的常识知识和视觉-语言特征相似性,制定导航策略。4) 运动控制模块:根据导航策略,控制机器人运动。整个流程是一个循环迭代的过程,机器人不断感知环境、更新CRSG、制定导航策略并执行运动,直到到达目标位置。
关键创新:最重要的技术创新点在于CRSG的构建和动态更新机制。与传统的静态场景表示方法不同,CRSG能够反映物体与其载体之间的关系,并能够随着场景的变化而动态更新。这种动态更新机制使得机器人能够更好地适应真实场景的复杂性,提高导航的鲁棒性和效率。此外,结合大型语言模型的常识知识和视觉-语言特征相似性也提高了导航决策的准确性。
关键设计:CRSG的构建需要识别物体及其载体,这可以通过目标检测和语义分割等技术实现。CRSG的更新需要跟踪物体的位置和载体关系的变化,这可以通过视觉里程计和目标跟踪等技术实现。导航策略的设计需要平衡探索和利用,可以使用强化学习等方法进行优化。论文中具体使用的参数设置、损失函数、网络结构等技术细节在论文正文中应该有更详细的描述(未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,通过更新CRSG,机器人可以有效地导航到移动的目标。在Habitat模拟器中,该方法在长序列导航任务中取得了显著的性能提升(具体数据未知,需参考论文原文)。此外,该算法在真实机器人上的部署也验证了其在实际应用中的有效性。
🎯 应用场景
该研究成果可应用于家庭服务机器人、商场导购机器人、仓库物流机器人等领域。通过动态更新场景表示,机器人能够更好地理解和适应复杂环境,提高导航效率和用户体验。未来,该技术有望应用于更广泛的场景,例如自动驾驶、智能安防等,实现更智能、更自主的机器人服务。
📄 摘要(原文)
In daily domestic settings, frequently used objects like cups often have unfixed positions and multiple instances within the same category, and their carriers frequently change as well. As a result, it becomes challenging for a robot to efficiently navigate to a specific instance. To tackle this challenge, the robot must capture and update scene changes and plans continuously. However, current object navigation approaches primarily focus on the semantic level and lack the ability to dynamically update scene representation. In contrast, this paper captures the relationships between frequently used objects and their static carriers. It constructs an open-vocabulary Carrier-Relationship Scene Graph (CRSG) and updates the carrying status during robot navigation to reflect the dynamic changes of the scene. Based on the CRSG, we further propose an instance navigation strategy that models the navigation process as a Markov Decision Process. At each step, decisions are informed by the Large Language Model's commonsense knowledge and visual-language feature similarity. We designed a series of long-sequence navigation tasks for frequently used everyday items in the Habitat simulator. The results demonstrate that by updating the CRSG, the robot can efficiently navigate to moved targets. Additionally, we deployed our algorithm on a real robot and validated its practical effectiveness. The project page can be found here: https://OpenIN-nav.github.io.