STLCG++: A Masking Approach for Differentiable Signal Temporal Logic Specification
作者: Parv Kapoor, Kazuki Mizuta, Eunsuk Kang, Karen Leung
分类: cs.RO, cs.LG, cs.SC
发布日期: 2025-01-08 (更新: 2025-09-15)
备注: ©2025 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
STLCG++:一种基于掩码的可微信号时序逻辑规范方法,加速机器人时空行为推理。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 信号时序逻辑 鲁棒性评估 可微编程 机器人控制 轨迹优化 掩码机制 并行计算
📋 核心要点
- 现有STL鲁棒性评估方法依赖循环计算,长序列效率低,限制了其在时间敏感应用中的应用。
- STLCG++采用基于掩码的方法,并行化STL鲁棒性评估和反向传播,提升计算效率。
- 引入平滑技术,实现时间间隔边界的可微性,扩展了STL在梯度优化任务中的应用范围。
📝 摘要(中文)
信号时序逻辑(STL)为机器人系统的时空行为规范和推理提供了一个简洁而富有表现力的框架。STL的一个吸引人的特性是其鲁棒性概念,即输入信号满足或违反STL规范的程度,从而为系统性能提供细致的评估。特别是,STL鲁棒性的可微性使得能够直接集成到依赖于基于梯度优化的机器人工作流程中,例如轨迹优化和深度学习。然而,现有的评估和区分STL鲁棒性的方法依赖于循环计算,这在较长的序列中变得效率低下,限制了它们在时间敏感型应用中的使用。在本文中,我们提出了STLCG++,一种基于掩码的方法,可以并行化STL鲁棒性评估和跨时间步的反向传播,与循环方法相比,实现了显著的加速。我们还引入了一种平滑技术,以实现时间间隔边界的区分,从而扩展了STL在涉及空间和时间变量的基于梯度优化任务中的适用性。最后,我们通过三个机器人用例展示了STLCG++的优势,并提供了JAX和PyTorch库,以便无缝集成到现代机器人工作流程中。项目网站包含演示和代码:https://uw-ctrl.github.io/stlcg/。
🔬 方法详解
问题定义:论文旨在解决现有信号时序逻辑(STL)鲁棒性评估方法在处理长序列时效率低下的问题。现有的方法通常采用循环计算,导致计算复杂度随序列长度线性增长,难以满足时间敏感型机器人应用的需求。此外,现有方法在处理时间间隔边界的微分时存在局限性,限制了STL在涉及时空变量优化的任务中的应用。
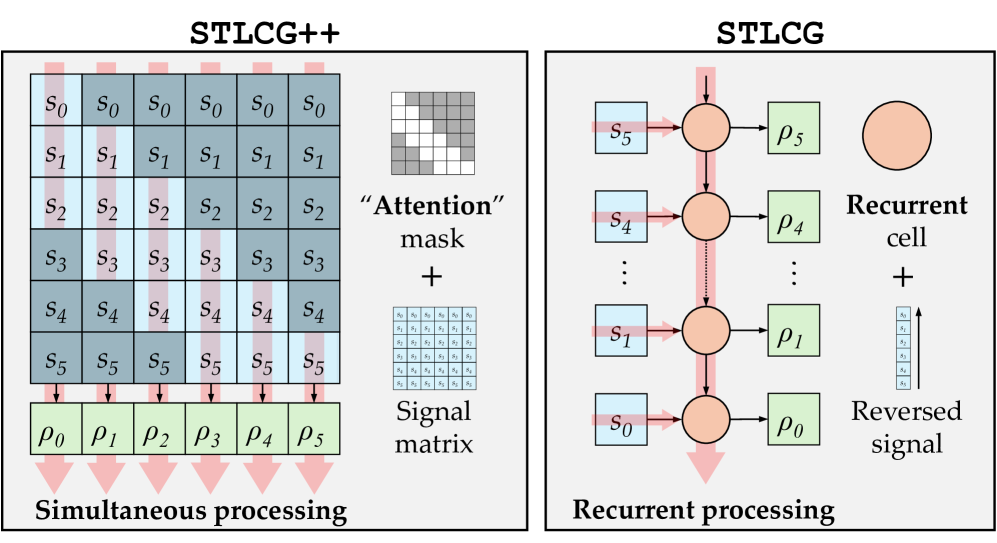
核心思路:STLCG++的核心思路是利用掩码机制实现STL鲁棒性评估和反向传播的并行化。通过预先计算所有可能的子公式的鲁棒性值,并使用掩码选择相关的计算结果,避免了循环计算,从而显著提高了计算效率。此外,论文还引入了一种平滑技术,使得时间间隔边界可以进行微分,从而扩展了STL的应用范围。
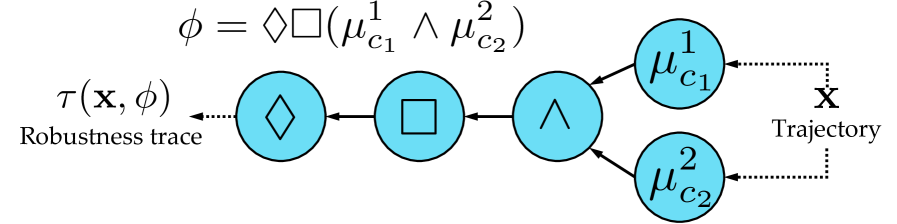
技术框架:STLCG++的整体框架包括以下几个主要步骤:1) 将STL公式分解为子公式;2) 并行计算所有子公式在每个时间步的鲁棒性值;3) 使用掩码选择与当前时间步相关的子公式的鲁棒性值;4) 使用平滑技术处理时间间隔边界的微分;5) 计算整个STL公式的鲁棒性值。该框架支持JAX和PyTorch,方便集成到现有的机器人工作流程中。
关键创新:STLCG++最重要的技术创新点在于使用掩码机制实现了STL鲁棒性评估和反向传播的并行化。与传统的循环计算方法相比,STLCG++能够显著提高计算效率,尤其是在处理长序列时。此外,论文提出的平滑技术使得时间间隔边界可以进行微分,从而扩展了STL的应用范围。
关键设计:STLCG++的关键设计包括:1) 使用二叉树结构表示STL公式,方便进行分解和计算;2) 设计了一种高效的掩码生成算法,用于选择与当前时间步相关的子公式的鲁棒性值;3) 采用Sigmoid函数对时间间隔边界进行平滑处理,使得可以进行微分;4) 提供了JAX和PyTorch的实现,方便用户使用。
🖼️ 关键图片
📊 实验亮点
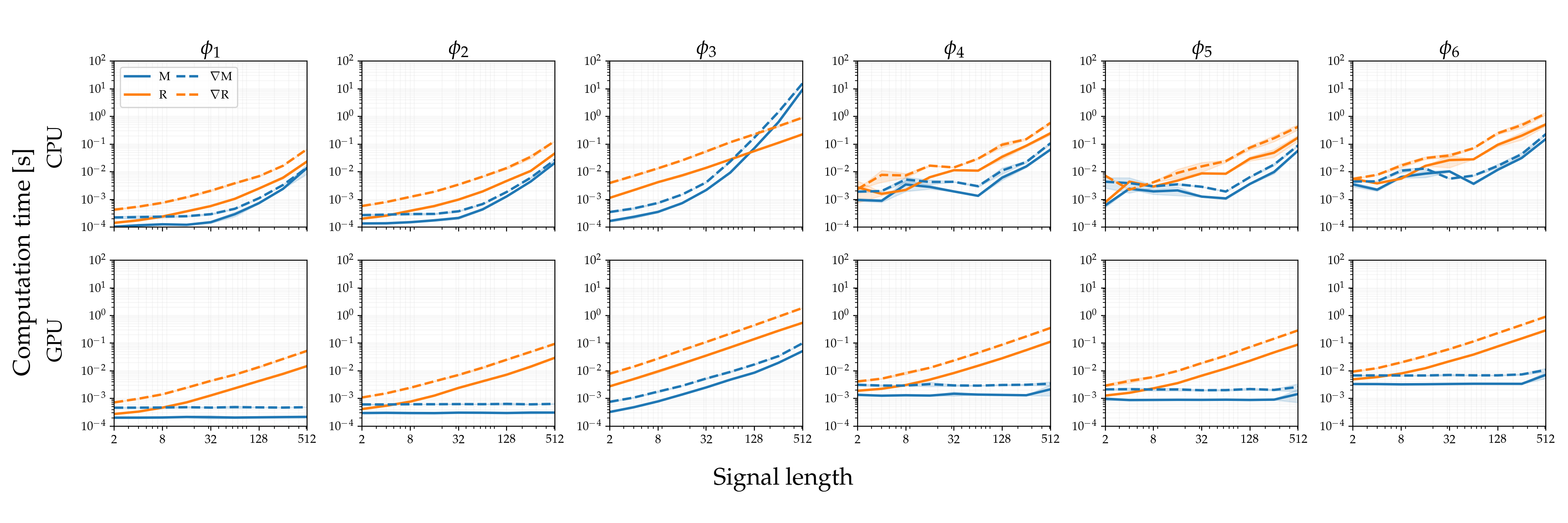
实验结果表明,STLCG++相比于循环方法,计算速度提升超过1000倍。此外,通过在机器人运动规划和轨迹优化等任务上的应用,验证了STLCG++的有效性和实用性。论文提供了JAX和PyTorch库,方便用户集成到现有的机器人工作流程中。
🎯 应用场景
STLCG++在机器人运动规划、轨迹优化、强化学习等领域具有广泛的应用前景。它可以用于设计满足复杂时空约束的机器人行为,例如自动驾驶车辆的安全行驶、工业机器人的精确操作等。通过与深度学习等技术的结合,STLCG++可以实现更加智能和自主的机器人系统。
📄 摘要(原文)
Signal Temporal Logic (STL) offers a concise yet expressive framework for specifying and reasoning about spatio-temporal behaviors of robotic systems. Attractively, STL admits the notion of robustness, the degree to which an input signal satisfies or violates an STL specification, thus providing a nuanced evaluation of system performance. In particular, the differentiability of STL robustness enables direct integration to robotic workflows that rely on gradient-based optimization, such as trajectory optimization and deep learning. However, existing approaches to evaluating and differentiating STL robustness rely on recurrent computations, which become inefficient with longer sequences, limiting their use in time-sensitive applications. In this paper, we present STLCG++, a masking-based approach that parallelizes STL robustness evaluation and backpropagation across timesteps, \revised{achieving more than 1000$\times$ faster computation time than the recurrent approach (STLCG++).}{achieving significant speed-ups compared to a recurrent approach.} We also introduce a smoothing technique to enable the differentiation of time interval bounds, thereby expanding STL's applicability in gradient-based optimization tasks involving spatial and temporal variables. Finally, we demonstrate STLCG++'s benefits through three robotics use cases and provide JAX and PyTorch libraries for seamless integration into modern robotics workflows. Project website with demo and code: https://uw-ctrl.github.io/stlcg/.