A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases
作者: Prasanna Sriganesh, Burhanuddin Shirose, Matthew Travers
分类: cs.RO
发布日期: 2025-01-07 (更新: 2025-03-21)
期刊: In IEEE Robotics and Automation Letters (RA-L), Volume 10, Issue 5, 2025
💡 一句话要点
提出一种贝叶斯建模框架,用于估计和分割复杂楼梯场景,提升机器人导航安全性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人导航 楼梯检测 状态估计 贝叶斯推理 点云分割
📋 核心要点
- 现有方法在复杂楼梯环境中,易受遮挡和噪声影响,导致机器人状态估计不准确,存在安全隐患。
- 采用无限宽楼梯表示与有限端点状态相结合的方式,并融入贝叶斯框架,实现对楼梯结构的鲁棒估计。
- 实验结果表明,该方法在楼梯估计精度和无杂物区域分割性能方面,均优于现有基线方法。
📝 摘要(中文)
本文提出了一种新的楼梯鲁棒状态估计方法,旨在解决复杂环境中自主机器人导航问题。由于遮挡等感知挑战以及机器人运动引入的不确定性,机器人容易将杂物误判为台阶,从而危及安全。为了应对超出机器人视野范围的楼梯遮挡问题,该方法结合了无限宽楼梯表示和有限端点状态,以捕捉整体楼梯结构。该表示被集成到贝叶斯推理框架中,融合了噪声测量,即使在部分观测和遮挡情况下也能准确估计楼梯位置。此外,还提出了一种分割算法,与楼梯估计流程协同工作,准确识别楼梯上的无杂物区域。在真实机器人上对各种楼梯进行了广泛评估,结果表明,与基线方法相比,估计精度和分割性能均有显著提高。
🔬 方法详解
问题定义:论文旨在解决复杂环境中机器人自主导航时,由于楼梯场景的遮挡和噪声干扰,导致机器人对楼梯状态估计不准确的问题。现有的方法在处理部分观测和遮挡时,鲁棒性较差,容易将杂物误判为台阶,影响导航安全。
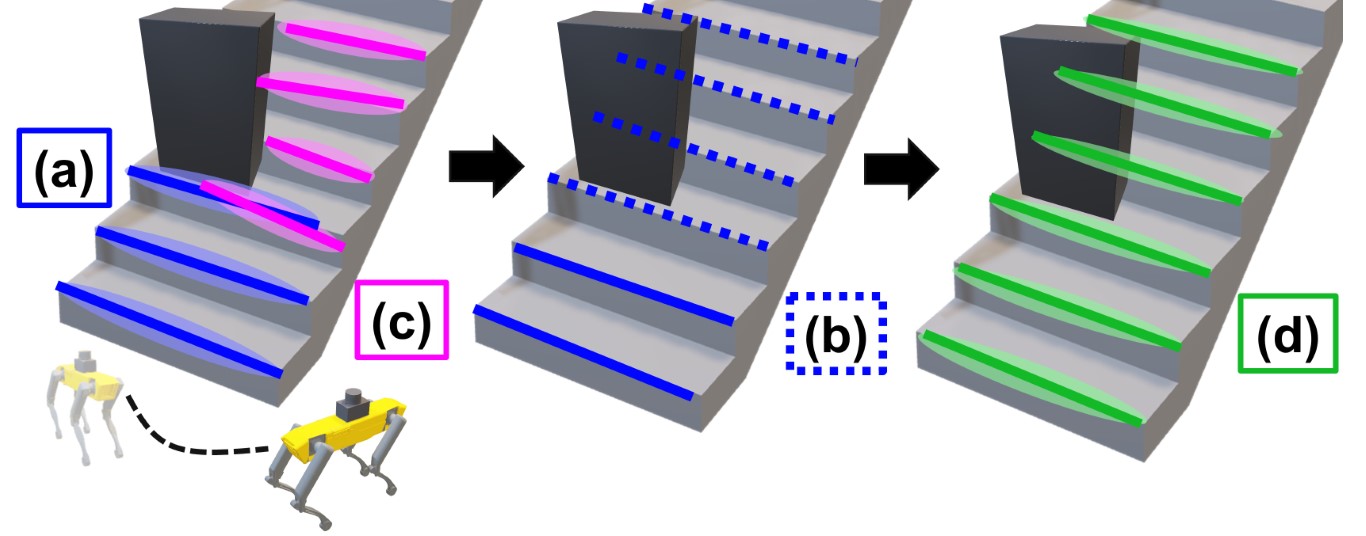
核心思路:论文的核心思路是将楼梯建模为一个无限宽的结构,并使用有限的端点状态来描述其位置和方向。这种表示方法能够有效地处理楼梯的遮挡问题,因为即使只有部分楼梯可见,也可以通过推断其端点状态来估计整个楼梯的结构。同时,利用贝叶斯推理框架融合来自不同传感器的噪声测量,进一步提高估计的鲁棒性。
技术框架:整体框架包含两个主要模块:楼梯状态估计模块和无杂物区域分割模块。楼梯状态估计模块首先使用传感器数据(例如,激光雷达点云)提取楼梯的特征。然后,将这些特征输入到贝叶斯推理框架中,该框架使用先验知识和观测数据来估计楼梯的端点状态。无杂物区域分割模块则利用估计的楼梯状态信息,将楼梯表面分割成无杂物区域和杂物区域。这两个模块协同工作,为机器人提供关于楼梯结构的完整信息。
关键创新:该论文的关键创新在于将无限宽楼梯表示与有限端点状态相结合,并将其融入贝叶斯推理框架中。这种方法能够有效地处理楼梯的遮挡问题,并提高状态估计的鲁棒性。与现有方法相比,该方法不需要完整的楼梯观测数据,即使在部分观测和遮挡情况下也能准确估计楼梯的位置和方向。
关键设计:贝叶斯推理框架使用卡尔曼滤波或粒子滤波等方法进行状态估计。先验知识可以包括楼梯的典型尺寸和形状。观测模型则描述了传感器数据与楼梯状态之间的关系。分割算法可以使用基于阈值的分割方法或基于机器学习的分割方法。具体的参数设置和损失函数需要根据具体的应用场景进行调整。
🖼️ 关键图片

📊 实验亮点
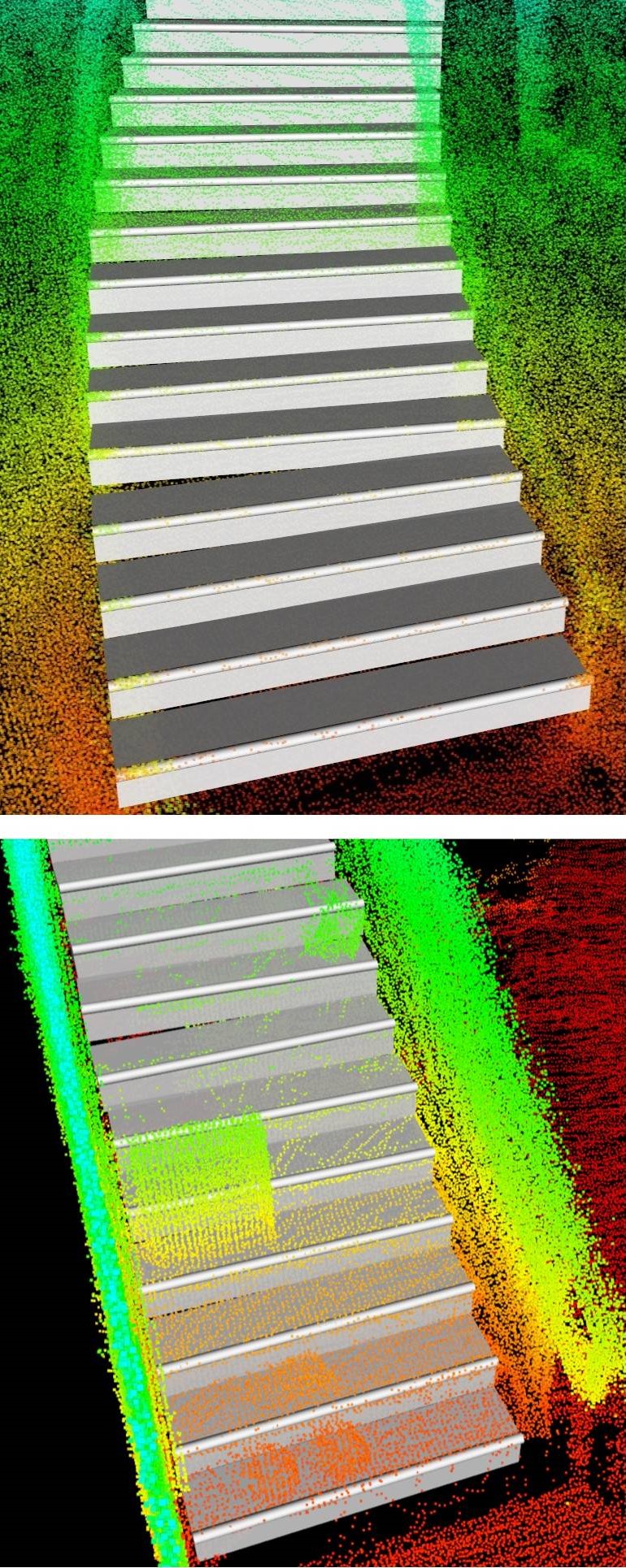
该方法在真实机器人平台上进行了广泛的实验验证,结果表明,与基线方法相比,该方法在楼梯状态估计精度和无杂物区域分割性能方面均有显著提高。具体而言,该方法能够有效地处理楼梯的遮挡问题,即使在部分观测和遮挡情况下也能准确估计楼梯的位置和方向。实验结果还表明,该方法具有较强的鲁棒性,能够适应各种不同的楼梯场景。
🎯 应用场景
该研究成果可应用于各种需要在复杂环境中进行自主导航的机器人,例如,服务机器人、物流机器人和搜救机器人。通过准确估计楼梯结构和分割无杂物区域,机器人可以安全高效地上下楼梯,完成各种任务。此外,该方法还可以扩展到其他结构化环境的感知和导航,例如,坡道和电梯。
📄 摘要(原文)
Autonomous robot navigation in complex environments requires robust perception as well as high-level scene understanding due to perceptual challenges, such as occlusions, and uncertainty introduced by robot movement. For example, a robot climbing a cluttered staircase can misinterpret clutter as a step, misrepresenting the state and compromising safety. This requires robust state estimation methods capable of inferring the underlying structure of the environment even from incomplete sensor data. In this paper, we introduce a novel method for robust state estimation of staircases. To address the challenge of perceiving occluded staircases extending beyond the robot's field-of-view, our approach combines an infinite-width staircase representation with a finite endpoint state to capture the overall staircase structure. This representation is integrated into a Bayesian inference framework to fuse noisy measurements enabling accurate estimation of staircase location even with partial observations and occlusions. Additionally, we present a segmentation algorithm that works in conjunction with the staircase estimation pipeline to accurately identify clutter-free regions on a staircase. Our method is extensively evaluated on real robot across diverse staircases, demonstrating significant improvements in estimation accuracy and segmentation performance compared to baseline approaches.