Steering Flexible Linear Objects in Planar Environments by Two Robot Hands Using Euler's Elastica Solutions
作者: Aharon Levin, Elon Rimon, Amir Shapiro
分类: cs.RO
发布日期: 2025-01-06 (更新: 2026-01-06)
💡 一句话要点
提出基于Euler's elastica的柔性线性物体双臂操控方法,解决复杂环境下的操纵问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 柔性物体操纵 双臂机器人 Euler's elastica 最优控制 运动规划
📋 核心要点
- 现有柔性物体操纵方法在复杂环境下存在不足,难以保证稳定性和避免自相交。
- 利用Euler's elastica闭式解,结合最优控制框架,实现对柔性物体的精确建模与控制。
- 通过实验验证了该方案在稀疏障碍物环境下的可行性,并展示了详细的操纵示例。
📝 摘要(中文)
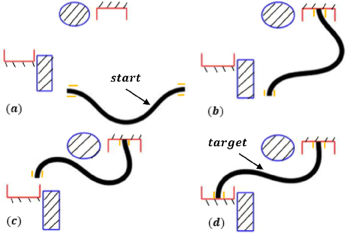
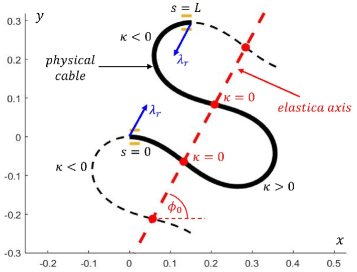
本文研究了在平面环境中通过两个机器人手臂操纵柔性线性物体的问题,例如电缆、电线和新鲜食品等。这种操纵对机器人抓取力学提出了特殊的挑战。本文将柔性线性物体建模为不可拉伸的弹性杆,通过改变抓取端点的位置并在保持端点切线相等的情况下进行操纵。柔性线性物体的形状可以通过闭式解表示,即Euler's elastica,它由抓取端点的位置和切线决定。本文在最优控制框架下获得了elastica解,然后利用这些解获得了柔性线性物体非自相交、稳定性和避障的闭式准则。这些新工具被整合到一个规划方案中,用于在稀疏障碍物填充的平面环境中操纵柔性线性物体。该方案已完全实现,并通过详细的示例进行了演示。
🔬 方法详解
问题定义:该论文旨在解决使用双臂机器人操纵柔性线性物体(如电缆、电线等)在平面环境中运动的问题。现有方法在处理此类问题时,难以同时保证物体的稳定性、避免自相交,以及在存在障碍物时进行有效避障。这些问题使得柔性物体的精确操纵变得非常困难。
核心思路:论文的核心思路是利用Euler's elastica理论对柔性线性物体的形状进行精确建模。Euler's elastica提供了一种闭式解,可以根据抓取端点的位置和切线来确定物体的形状。通过控制抓取端点的位置和切线,可以实现对柔性物体的精确控制。此外,论文还利用最优控制框架来寻找满足特定约束(如非自相交、稳定性、避障)的elastica解。
技术框架:该方法的技术框架主要包括以下几个阶段:1) 使用Euler's elastica对柔性线性物体进行建模;2) 在最优控制框架下,根据抓取端点的位置和切线计算elastica解;3) 基于elastica解,建立非自相交、稳定性和避障的闭式准则;4) 将这些准则整合到规划方案中,用于在存在障碍物的环境中规划柔性物体的运动轨迹;5) 通过双臂机器人系统执行规划的运动轨迹。
关键创新:该论文的关键创新在于:1) 将Euler's elastica理论应用于柔性物体的操纵问题,提供了一种精确的建模方法;2) 推导了非自相交、稳定性和避障的闭式准则,为柔性物体的操纵提供了理论基础;3) 提出了一个完整的规划方案,可以在存在障碍物的环境中实现柔性物体的精确操纵。与现有方法相比,该方法能够更有效地处理复杂环境下的柔性物体操纵问题。
关键设计:论文的关键设计包括:1) 使用相同的端点切线约束,简化了elastica解的计算;2) 基于elastica解推导出的闭式准则,可以快速判断物体的状态是否满足要求;3) 规划方案的设计考虑了多种约束条件,如非自相交、稳定性、避障等,保证了操纵的可靠性。
🖼️ 关键图片

📊 实验亮点
论文通过详细的示例展示了该方案在稀疏障碍物环境中操纵柔性线性物体的能力。实验结果表明,该方法能够有效地避免自相交和障碍物碰撞,并保持物体的稳定性。虽然论文中没有提供具体的性能数据或与其他基线的定量比较,但实验示例充分证明了该方法的可行性和有效性。
🎯 应用场景
该研究成果可应用于多个领域,如:工业自动化中电缆和电线的布线、食品加工中柔性食品的搬运、医疗机器人中导管的插入等。通过精确控制柔性物体,可以提高生产效率、降低操作风险,并实现更复杂的任务。未来,该技术有望应用于更广泛的柔性物体操纵场景,例如在狭小空间或复杂环境中进行操作。
📄 摘要(原文)
The manipulation of flexible objects such as cables, wires and fresh food items by robot hands forms a special challenge in robot grasp mechanics. This paper considers the steering of flexible linear objects in planar environments by two robot hands. The flexible linear object, modeled as an elastic non-stretchable rod, is manipulated by varying the gripping endpoint positions while keeping equal endpoint tangents. The flexible linear object shape has a closed form solution in terms of the grasp endpoint positions and tangents, called Euler's elastica. This paper obtains the elastica solutions under the optimal control framework, then uses the elastica solutions to obtain closed-form criteria for non self-intersection, stability and obstacle avoidance of the flexible linear object. The new tools are incorporated into a planning scheme for steering flexible linear objects in planar environments populated by sparsely spaced obstacles. The scheme is fully implemented and demonstrated with detailed examples.