Real-Time Sampling-Based Safe Motion Planning for Robotic Manipulators in Dynamic Environments
作者: Nermin Covic, Bakir Lacevic, Dinko Osmankovic, Tarik Uzunovic
分类: cs.RO
发布日期: 2024-12-31 (更新: 2025-08-27)
期刊: IEEE Transactions on Robotics, 2025, ras.tro.25-0686.35660151
💡 一句话要点
提出DRGBT算法,解决动态环境下机器人机械臂的实时安全运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动规划 动态环境 实时规划 安全规划 采样算法
📋 核心要点
- 现有动态环境下的机器人运动规划方法难以兼顾实时性和安全性,尤其是在计算资源有限的情况下。
- DRGBT算法通过动态扩展自由配置空间气泡,并结合时间分析和调度,保证了运动规划的实时性和安全性。
- 实验结果表明,该算法在真实机器人上能够实时运行,且无需GPU或大量并行化,具有实际应用价值。
📝 摘要(中文)
本文介绍了动态快速探索广义Bur树(DRGBT)算法的主要特性,这是一种用于动态环境的基于采样的规划器。我们提供了详细的时间分析和适当的调度,以促进实时操作。为此,我们进行了广泛的分析,以确定时间关键的例程及其对障碍物数量的依赖性。此外,利用到障碍物的距离信息来计算一种称为自由配置空间的动态扩展气泡的结构,然后利用该结构来建立保证机器人安全运动的充分条件,同时满足所有运动学约束。进行了广泛的随机模拟试验,将所提出的算法与一种有竞争力的最先进方法进行了比较。最后,在真实机器人上进行了一项实验研究,涵盖了各种场景,包括存在人类的场景。结果表明,在典型的基于传感器的布置中,使用廉价的硬件和顺序架构,无需GPU或大量并行化,所提出的运动规划算法的实时执行是有效和可行的。
🔬 方法详解
问题定义:在动态环境中,机器人机械臂需要快速且安全地规划运动轨迹,以避免与移动的障碍物(包括人)发生碰撞。现有的运动规划方法通常计算复杂度高,难以满足实时性要求,或者在保证安全性的同时牺牲了规划效率。尤其是在计算资源有限的场景下,如何实现实时且安全的运动规划是一个挑战。
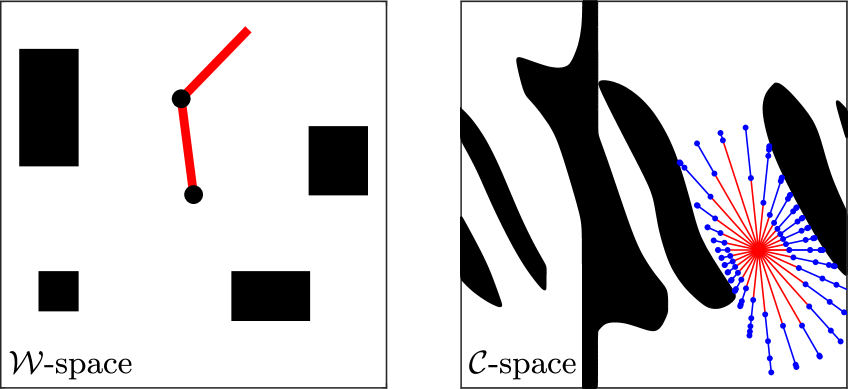
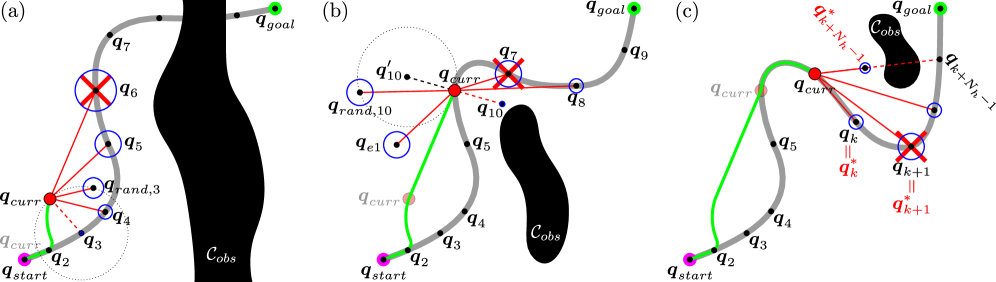
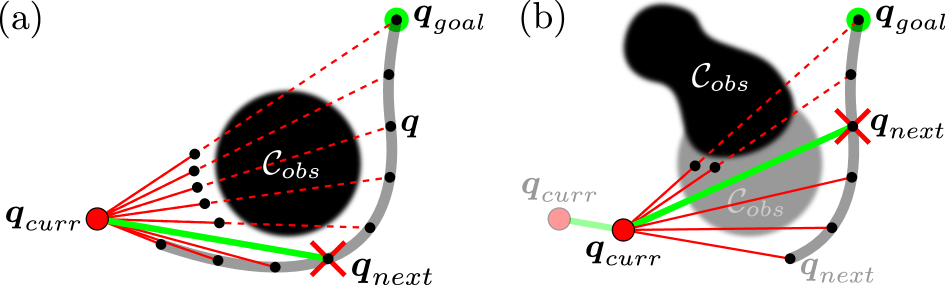
核心思路:DRGBT算法的核心思路是利用采样的思想,在配置空间中快速探索可行路径。为了保证安全性,算法维护一个动态扩展的自由配置空间气泡,该气泡基于到障碍物的距离信息计算得到,确保机器人始终在安全区域内运动。同时,通过详细的时间分析和调度,优化算法的执行效率,使其能够在实时约束下运行。
技术框架:DRGBT算法的整体框架包括以下几个主要模块:1) 采样:在配置空间中随机采样新的配置点。2) 碰撞检测:检测采样点是否与环境中的障碍物发生碰撞。3) 动态扩展气泡计算:根据到障碍物的距离信息,计算自由配置空间的动态扩展气泡。4) 路径连接:尝试将新的采样点连接到已有的树结构中,并保证连接路径在安全气泡内。5) 时间分析与调度:对算法中的各个模块进行时间分析,识别时间关键的例程,并进行合理的调度,以保证实时性。
关键创新:DRGBT算法的关键创新在于:1) 动态扩展的自由配置空间气泡:该气泡能够根据环境的变化动态调整大小,保证机器人在安全区域内运动。2) 详细的时间分析与调度:通过对算法进行时间分析,识别时间瓶颈,并进行优化,从而保证算法的实时性。3) 算法能够在计算资源有限的硬件平台上实时运行,无需GPU或大量并行化。
关键设计:动态扩展气泡的大小取决于机器人与障碍物之间的距离。距离越远,气泡越大,允许机器人有更大的运动自由度;距离越近,气泡越小,限制机器人的运动范围,以保证安全。时间分析主要关注碰撞检测和路径连接等时间复杂度高的模块。调度策略根据障碍物的数量和环境的复杂程度动态调整各个模块的执行时间,以平衡规划效率和实时性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,DRGBT算法能够在真实机器人上实现实时运行,且无需GPU或大量并行化。在包含人类的动态环境中,该算法能够安全地规划机器人的运动轨迹,避免碰撞。与现有方法相比,DRGBT算法在保证安全性的前提下,显著提高了规划效率和实时性。具体性能数据未知,但强调了在廉价硬件上的可行性。
🎯 应用场景
该研究成果可应用于各种需要机器人机械臂在动态环境中进行实时安全运动规划的场景,例如:人机协作装配、物流仓储、医疗手术机器人等。通过该算法,机器人可以在复杂和动态的环境中安全高效地完成任务,提高生产效率和安全性,并降低人工成本。未来,该算法可以进一步扩展到多机器人协作和更复杂的环境。
📄 摘要(原文)
In this paper, we present the main features of Dynamic Rapidly-exploring Generalized Bur Tree (DRGBT) algorithm, a sampling-based planner for dynamic environments. We provide a detailed time analysis and appropriate scheduling to facilitate a real-time operation. To this end, an extensive analysis is conducted to identify the time-critical routines and their dependence on the number of obstacles. Furthermore, information about the distance to obstacles is used to compute a structure called dynamic expanded bubble of free configuration space, which is then utilized to establish sufficient conditions for a guaranteed safe motion of the robot while satisfying all kinematic constraints. An extensive randomized simulation trial is conducted to compare the proposed algorithm to a competing state-of-the-art method. Finally, an experimental study on a real robot is carried out covering a variety of scenarios including those with human presence. The results show the effectiveness and feasibility of real-time execution of the proposed motion planning algorithm within a typical sensor-based arrangement, using cheap hardware and sequential architecture, without the necessity for GPUs or heavy parallelization.