Design Optimizer for Soft Growing Robot Manipulators in Three-Dimensional Environments
作者: Ahmet Astar, Ozan Nurcan, Erk Demirel, Emir Ozen, Ozan Kutlar, Fabio Stroppa
分类: cs.RO, cs.AI, cs.NE
发布日期: 2024-12-31 (更新: 2025-01-23)
备注: 17 pages, 10 figures
💡 一句话要点
提出软体生长机器人三维环境设计优化器,提升操作精度与资源利用率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 生长机器人 设计优化 进化计算 多目标优化
📋 核心要点
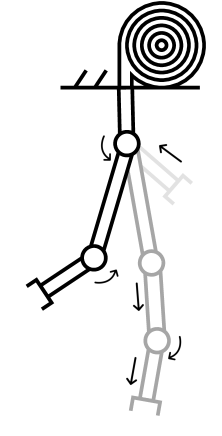
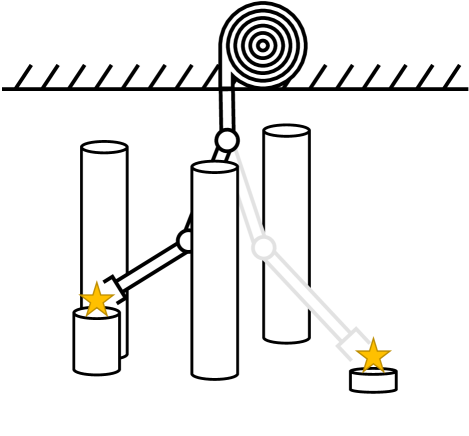
- 软体生长机器人擅长在复杂环境中导航,但缺乏针对特定任务的设计优化工具。
- 论文提出一种设计优化器,通过多目标优化改进软体机械臂的运动链,以适应三维环境。
- 实验结果表明,该优化器在三维任务中表现出色,且对不同的进化计算算法具有鲁棒性。
📝 摘要(中文)
本文提出了一种软体生长机器人的设计优化方法,特别是在平面机械臂优化器基础上进行了三维扩展。该工具旨在帮助工程师和机器人爱好者在制造机器人之前,确定解决特定任务的最佳机器人尺寸。设计过程将软体机械臂的运动链优化建模为一个多目标优化问题。通过将新颖的排序分割算法集成到进化计算(EC)算法中,该方法在到达目标方面实现了高精度,并提高了资源利用效率。结果表明,该优化器在解决三维任务方面表现出显著的高性能,比较实验表明,该优化器在不同的EC算法(特别是遗传算法)测试中具有稳健的输出。
🔬 方法详解
问题定义:软体生长机器人在复杂三维环境中执行任务时,其性能高度依赖于其物理尺寸和运动学设计。现有的设计方法往往依赖于人工经验或试错,缺乏系统性的优化策略,导致机器人性能受限,资源利用率不高。因此,需要一种能够自动优化软体生长机器人设计,以满足特定任务需求的方法。
核心思路:论文的核心思路是将软体生长机器人的设计问题转化为一个多目标优化问题。通过优化机器人的运动链参数,例如节段长度和弯曲角度,以最大化其在三维空间中到达目标点的精度,并最小化资源消耗。这种方法允许在设计阶段就考虑到任务需求,从而提高机器人的整体性能。
技术框架:该设计优化器的整体框架包括以下几个主要阶段:1) 问题建模:将软体生长机器人的运动学模型和任务需求转化为数学优化问题。2) 优化算法选择:选择合适的进化计算算法,例如遗传算法,作为优化引擎。3) 排序分割算法集成:将新颖的排序分割算法集成到进化计算算法中,以提高优化效率和精度。4) 结果评估:评估优化后的机器人设计在特定任务中的性能。
关键创新:该论文的关键创新在于将排序分割算法集成到进化计算算法中。传统的进化计算算法在处理高维优化问题时,容易陷入局部最优解。排序分割算法通过对种群进行排序和分割,能够更有效地探索搜索空间,从而找到全局最优解。这种方法显著提高了优化精度和效率。
关键设计:关键设计包括:1) 运动学模型:采用精确的运动学模型来描述软体生长机器人的运动。2) 目标函数:设计多目标函数,同时考虑到达精度和资源消耗。3) 排序分割算法:具体实现细节未知,但其核心思想是对种群进行排序,并根据排序结果将种群分割成不同的子集,然后对每个子集进行不同的操作,以提高搜索效率。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该优化器在解决三维任务方面表现出显著的高性能。通过集成排序分割算法,优化器在到达目标方面实现了高精度,并提高了资源利用效率。对比实验表明,该优化器在不同的进化计算算法(特别是遗传算法)测试中具有稳健的输出,这意味着该优化器具有良好的泛化能力。
🎯 应用场景
该研究成果可应用于各种需要在复杂或危险环境中进行操作的场景,例如灾难救援、医疗手术、工业检测等。通过优化软体生长机器人的设计,可以提高其在这些场景中的操作精度和效率,从而更好地完成任务。此外,该优化器还可以作为一种通用的设计工具,帮助工程师和机器人爱好者快速设计出满足特定需求的软体生长机器人。
📄 摘要(原文)
Soft growing robots are novel devices that mimic plant-like growth for navigation in cluttered or dangerous environments. Their ability to adapt to surroundings, combined with advancements in actuation and manufacturing technologies, allows them to perform specialized manipulation tasks. This work presents an approach for design optimization of soft growing robots; specifically, the three-dimensional extension of the optimizer designed for planar manipulators. This tool is intended to be used by engineers and robot enthusiasts before manufacturing their robot: it suggests the optimal size of the robot for solving a specific task. The design process models a multi-objective optimization problem to refine a soft manipulator's kinematic chain. Thanks to the novel Rank Partitioning algorithm integrated into Evolutionary Computation (EC) algorithms, this method achieves high precision in reaching targets and is efficient in resource usage. Results show significantly high performance in solving three-dimensional tasks, whereas comparative experiments indicate that the optimizer features robust output when tested with different EC algorithms, particularly genetic algorithms.